Das könnte Ihnen auch gefallen
- Geometry of Ships and Ship-Shaped Deepwater Floating SystemsDokument55 SeitenGeometry of Ships and Ship-Shaped Deepwater Floating SystemsKrishnan ChockalingamNoch keine Bewertungen
- Angle of LolDokument11 SeitenAngle of LolNitinVanjariNoch keine Bewertungen
- DefinitionsDokument3 SeitenDefinitionsAhmed AboelmagdNoch keine Bewertungen
- Seamanship 6 Advanced Trim Stabilitystress CELTECHDokument128 SeitenSeamanship 6 Advanced Trim Stabilitystress CELTECHasta YunoNoch keine Bewertungen
- Initial Transverse MetacentreDokument9 SeitenInitial Transverse MetacentreBharatiyulamNoch keine Bewertungen
- Effect of Slack TanksDokument16 SeitenEffect of Slack Tanksreagan figueroaNoch keine Bewertungen
- Week 8 Ship Stability OOW Free SurfaceDokument19 SeitenWeek 8 Ship Stability OOW Free SurfaceAmin Al QawasmehNoch keine Bewertungen
- Stability Theory IIIDokument32 SeitenStability Theory IIISergio RuedaNoch keine Bewertungen
- Ship Stability NomenclatureDokument6 SeitenShip Stability NomenclatureRoderick EstrellaNoch keine Bewertungen
- Basic PrinciplesDokument11 SeitenBasic PrinciplesAshok KumarNoch keine Bewertungen
- Intro To NADokument11 SeitenIntro To NAAnshuman SharmaNoch keine Bewertungen
- Chapter 10 - Curves of Statical Stability (GZ Curves)Dokument9 SeitenChapter 10 - Curves of Statical Stability (GZ Curves)Adrian B.100% (1)
- Ship Stability ConceptsDokument17 SeitenShip Stability ConceptsDarwin Neil MoranoNoch keine Bewertungen
- GZ Curve OOW Ship StabilityDokument26 SeitenGZ Curve OOW Ship StabilityAmin Al QawasmehNoch keine Bewertungen
- Rolling Period ExplainedDokument3 SeitenRolling Period ExplainedGary LampenkoNoch keine Bewertungen
- StabilityDokument243 SeitenStabilitySaptarshi Basu100% (3)
- IMU SEM I - T103 - ShipConDokument61 SeitenIMU SEM I - T103 - ShipConSubhash shahu0% (1)
- Trim - General StabilityDokument7 SeitenTrim - General StabilityNeeraj RahiNoch keine Bewertungen
- Chs - Stability and Trim CalculationsDokument48 SeitenChs - Stability and Trim CalculationsEdsel LoganNoch keine Bewertungen
- Calculation of Draft SurveyDokument27 SeitenCalculation of Draft Surveysaif100% (1)
- Stability BDokument16 SeitenStability BVineet KumarNoch keine Bewertungen
- Stability FormulaeDokument4 SeitenStability FormulaePaul Ashton100% (1)
- Mates Stability 1 PDFDokument21 SeitenMates Stability 1 PDFSergey Vasilievich ChetverichenkoNoch keine Bewertungen
- Stability Talkie TalkieDokument46 SeitenStability Talkie TalkieSakthi Javelin100% (1)
- Stability Notes:-Bulk Grain CargoesDokument2 SeitenStability Notes:-Bulk Grain CargoesSankar Ganesh100% (1)
- Ship Stability PDFDokument17 SeitenShip Stability PDFMd. Shahjada TarafderNoch keine Bewertungen
- Intact Stability and Stability in The Damaged ConditionDokument14 SeitenIntact Stability and Stability in The Damaged Conditionhrish732Noch keine Bewertungen
- Calculating ship stability and performance metricsDokument31 SeitenCalculating ship stability and performance metricsStaicu-Anghel ElenaNoch keine Bewertungen
- Mca Formula SheetDokument4 SeitenMca Formula SheetBharatiyulamNoch keine Bewertungen
- Unit IDokument24 SeitenUnit IsomasundaramNoch keine Bewertungen
- What Is A Tropical Revolving Storm (TRS)Dokument58 SeitenWhat Is A Tropical Revolving Storm (TRS)Diwakar SinghNoch keine Bewertungen
- Bulk Carrier Cargo CalculationsDokument7 SeitenBulk Carrier Cargo Calculationsmeghna c binu100% (1)
- GZ Curves For Different Conditions, List LollDokument23 SeitenGZ Curves For Different Conditions, List LollAbhishek PawarNoch keine Bewertungen
- Initial Transverse Metacenter CugalDokument19 SeitenInitial Transverse Metacenter CugalPete KatipunanNoch keine Bewertungen
- List of GZ Curves To Be Looked Upon For Stability Exam SqaDokument2 SeitenList of GZ Curves To Be Looked Upon For Stability Exam SqaithankjesusNoch keine Bewertungen
- GZ CURVE and GMDokument3 SeitenGZ CURVE and GMSuresh Panneer100% (1)
- Free Surface Effect: Dcad Rocloyd LigasonDokument28 SeitenFree Surface Effect: Dcad Rocloyd LigasonZtik Peralta100% (3)
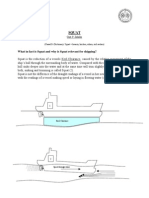
- Squat: What in Fact Is Squat and Why Is Squat Relevant For Shipping?Dokument8 SeitenSquat: What in Fact Is Squat and Why Is Squat Relevant For Shipping?Abhay Kinra100% (2)
- LISTDokument5 SeitenLISTBharatiyulamNoch keine Bewertungen
- CALCULATING STABILITY METRICS LIKE KB, BM AND GMDokument16 SeitenCALCULATING STABILITY METRICS LIKE KB, BM AND GMKunal BhatiaNoch keine Bewertungen
- 1st Attempt Oral Questions (Class 2 COC)Dokument1 Seite1st Attempt Oral Questions (Class 2 COC)TayZar1977Noch keine Bewertungen
- Owaysonline notes on naval architecture and past papersDokument368 SeitenOwaysonline notes on naval architecture and past papersAnchor Inc100% (3)
- A General Discussion On Ship StabilityDokument6 SeitenA General Discussion On Ship StabilityAnonymous UCveMQNoch keine Bewertungen
- Trim or Longitudinal StabilityDokument5 SeitenTrim or Longitudinal StabilityA JSprNoch keine Bewertungen
- Handout of SHIP CONSTRUCTION (NASC) GMEDokument52 SeitenHandout of SHIP CONSTRUCTION (NASC) GMEInderjeet KumarNoch keine Bewertungen
- Module 24 Damage StabilityDokument9 SeitenModule 24 Damage StabilitySippu SifathullahNoch keine Bewertungen
- Introduction To Rendezvous Least TimeDokument28 SeitenIntroduction To Rendezvous Least TimecicileanaNoch keine Bewertungen
- Ship Construction PDFDokument118 SeitenShip Construction PDFAhmed SalemNoch keine Bewertungen
- Stability NotesDokument17 SeitenStability Notesnithin manimaranNoch keine Bewertungen
- Trim HandoutDokument1 SeiteTrim Handoutjwaters3Noch keine Bewertungen
- Floatation and Its Laws PDFDokument2 SeitenFloatation and Its Laws PDFtarak dasNoch keine Bewertungen
- Tanker Disasters: IMO's Places of Refuge and the Special Compensation Clause; Erika, Prestige, Castor and 65 CasualtiesVon EverandTanker Disasters: IMO's Places of Refuge and the Special Compensation Clause; Erika, Prestige, Castor and 65 CasualtiesNoch keine Bewertungen
- Ship Magnetism and the Magnetic Compass: The Commonwealth and International Library of Science, Technology, Engineering and Liberal Studies: Navigation and Nautical CoursesVon EverandShip Magnetism and the Magnetic Compass: The Commonwealth and International Library of Science, Technology, Engineering and Liberal Studies: Navigation and Nautical CoursesBewertung: 5 von 5 Sternen5/5 (3)
- Anchorages and Marinas of the Eastern Canaries: Sailing off the Coasts of Lanzarote, Fuerteventura and Gran CanariaVon EverandAnchorages and Marinas of the Eastern Canaries: Sailing off the Coasts of Lanzarote, Fuerteventura and Gran CanariaNoch keine Bewertungen
- Umeguard SX Grey n6Dokument6 SeitenUmeguard SX Grey n6Mugilrajan DevarajanNoch keine Bewertungen
- Epicon T 500Dokument12 SeitenEpicon T 500Mugilrajan DevarajanNoch keine Bewertungen
- Umeguard SX White Cs-651Dokument12 SeitenUmeguard SX White Cs-651Mugilrajan DevarajanNoch keine Bewertungen
- Marine InsuranceDokument23 SeitenMarine InsuranceRishabh DubeyNoch keine Bewertungen
- Course CompendiumDokument99 SeitenCourse CompendiumMugilrajan Devarajan100% (1)
- Umeguard SX Grey n6Dokument6 SeitenUmeguard SX Grey n6Mugilrajan DevarajanNoch keine Bewertungen
- Epicon T 500Dokument12 SeitenEpicon T 500Mugilrajan DevarajanNoch keine Bewertungen
- Marine InsuranceDokument23 SeitenMarine InsuranceRishabh DubeyNoch keine Bewertungen
- Umeguard SX White Cs-651Dokument12 SeitenUmeguard SX White Cs-651Mugilrajan DevarajanNoch keine Bewertungen
- Marine InsuranceDokument23 SeitenMarine InsuranceRishabh DubeyNoch keine Bewertungen
- Mugilrajan B6 M3Dokument15 SeitenMugilrajan B6 M3Mugilrajan Devarajan100% (2)
- Port Agent & Laytime CalculationDokument3 SeitenPort Agent & Laytime CalculationMugilrajan DevarajanNoch keine Bewertungen
- Basic Marine Cargo Insurance PresentationDokument16 SeitenBasic Marine Cargo Insurance Presentationpalak2407Noch keine Bewertungen
- 7 - Diesel - Cycle PDFDokument5 Seiten7 - Diesel - Cycle PDFLalith KrishnanNoch keine Bewertungen
- Stability Information ManualDokument381 SeitenStability Information ManualBharath Kumar Vasamsetty100% (2)
- Marine Electrical Engineering: TransformersDokument35 SeitenMarine Electrical Engineering: TransformersMugilrajan DevarajanNoch keine Bewertungen
- HIMT Extra First Class Engineering Course Semester Two Maritime Regulations AssignmentDokument2 SeitenHIMT Extra First Class Engineering Course Semester Two Maritime Regulations AssignmentMugilrajan DevarajanNoch keine Bewertungen
- Ship ConstructionDokument25 SeitenShip ConstructionPraveenesh ReddyNoch keine Bewertungen
- Ever Excel ReportDokument56 SeitenEver Excel ReportMugilrajan DevarajanNoch keine Bewertungen
- Difference Between OWS MEPC 60 (33) and 107Dokument2 SeitenDifference Between OWS MEPC 60 (33) and 107MannMann82% (17)
- Pre-delivery Fuel Oil Bunker Delivery Note (39Dokument3 SeitenPre-delivery Fuel Oil Bunker Delivery Note (39Mugilrajan Devarajan100% (2)
- Casualty Investigation Ms ActDokument3 SeitenCasualty Investigation Ms ActMugilrajan DevarajanNoch keine Bewertungen
- Annex V LatestDokument32 SeitenAnnex V LatestVinod PillaiNoch keine Bewertungen
- High Voltage System On ShipsDokument17 SeitenHigh Voltage System On Shipsyukiran1981Noch keine Bewertungen
- Chapter 4 - Classification of Steels, Welding of Mild SteelsDokument26 SeitenChapter 4 - Classification of Steels, Welding of Mild SteelsAkhmad Zaenudin100% (1)
- What Will Be The Effect On Freight Rate Due To Technological Innovation in Fuel System Which Changes The Speed and Fuel Price?Dokument9 SeitenWhat Will Be The Effect On Freight Rate Due To Technological Innovation in Fuel System Which Changes The Speed and Fuel Price?D-pac100% (1)
- IccpDokument14 SeitenIccpMugilrajan DevarajanNoch keine Bewertungen
- Stop Ford 2013Dokument31 SeitenStop Ford 2013Mugilrajan DevarajanNoch keine Bewertungen
- Vibration Characteristics of Two-Stroke Low Speed Diesel EnginesDokument27 SeitenVibration Characteristics of Two-Stroke Low Speed Diesel EnginesVassilis MillasNoch keine Bewertungen
- Tutorial Completo Stepper SKCDokument52 SeitenTutorial Completo Stepper SKCricwerNoch keine Bewertungen
- Gasoline Transfer Pump ProcessDokument24 SeitenGasoline Transfer Pump ProcesscahyaNoch keine Bewertungen
- BRC1C62 0 PDFDokument7 SeitenBRC1C62 0 PDFIGN SayogaNoch keine Bewertungen
- CTS-AutomotiveServiceTech310S L1 MP EN PDFDokument59 SeitenCTS-AutomotiveServiceTech310S L1 MP EN PDFDoDuyBacNoch keine Bewertungen
- Unit Number 1: GAS ABSORPTIONDokument22 SeitenUnit Number 1: GAS ABSORPTIONISAAC STANLYNoch keine Bewertungen
- Power and Air ToolsDokument50 SeitenPower and Air ToolsHuron Industrial SupplyNoch keine Bewertungen
- Davit Anchor CalculationDokument6 SeitenDavit Anchor CalculationRiyas RafiNoch keine Bewertungen
- F - FBV-150LB-0.5in To 3in-WCB-SS316-RF-LeverDokument1 SeiteF - FBV-150LB-0.5in To 3in-WCB-SS316-RF-Leverrashid kNoch keine Bewertungen
- Product PDF 388537Dokument2 SeitenProduct PDF 388537abdu taliaNoch keine Bewertungen
- 2014 Chevrolet GMC Duramax Diesel en CADokument132 Seiten2014 Chevrolet GMC Duramax Diesel en CAsamsularief03Noch keine Bewertungen
- hx10m 2008 540Dokument6 Seitenhx10m 2008 540Хелфор УкраинаNoch keine Bewertungen
- Load Combinations Due To ACI 2008Dokument7 SeitenLoad Combinations Due To ACI 2008AhmedNoch keine Bewertungen
- Lattice Steel Towers and Steel PolesDokument7 SeitenLattice Steel Towers and Steel Polesyudha_hermawan_kinoy0% (1)
- Steam-Turbines 2 PDFDokument2 SeitenSteam-Turbines 2 PDFGaneshsikarwarNoch keine Bewertungen
- 1922Dokument301 Seiten1922Rafael Leonardo GomezNoch keine Bewertungen
- Drilling Technical Services Automated Machine ManualDokument16 SeitenDrilling Technical Services Automated Machine ManualFabiola RuizNoch keine Bewertungen
- 498.03 821837931001 821837939999 PO128-Conveyor Front Flap BF 800 BPDokument9 Seiten498.03 821837931001 821837939999 PO128-Conveyor Front Flap BF 800 BPeshopmanual EnamNoch keine Bewertungen
- Parts Manual Bepb063900 Not Current KomatsuDokument649 SeitenParts Manual Bepb063900 Not Current KomatsuJulito Castellanos67% (3)
- Impeller Vortex ApparatusDokument2 SeitenImpeller Vortex ApparatusGenesis GendranoNoch keine Bewertungen
- P36P1S-P40E1S ratingsDokument1 SeiteP36P1S-P40E1S ratingsDavis AcuñaNoch keine Bewertungen
- Geometry of Deformation: TodayDokument7 SeitenGeometry of Deformation: TodayRMNoch keine Bewertungen
- Sakai SV540Dokument108 SeitenSakai SV540George PlishkoNoch keine Bewertungen
- Distortion in Welding Report for Telcon Excavator PartsDokument38 SeitenDistortion in Welding Report for Telcon Excavator Partsgetravi1886100% (1)
- 816 (Welding)Dokument29 Seiten816 (Welding)Subhash SharmaNoch keine Bewertungen
- Theoretical 3: Solution: Physics of SpinDokument5 SeitenTheoretical 3: Solution: Physics of SpinKhongor DamdinbayarNoch keine Bewertungen
- DONALDSON Caterpillar Vehicle CardDokument151 SeitenDONALDSON Caterpillar Vehicle CardAgus Yulfizar100% (1)
- Backhoe Loader ComparisonDokument39 SeitenBackhoe Loader ComparisonLuisalbertxNoch keine Bewertungen
- Heavy Lifting WorkshopDokument63 SeitenHeavy Lifting WorkshopRinda Purwanto IMM BontangNoch keine Bewertungen
- Protections and Interlocks For 210 MW LMW TurbinesDokument35 SeitenProtections and Interlocks For 210 MW LMW Turbinessastivelavan100% (2)
- 26-Spirax Sarco Tech 1.PppDokument1 Seite26-Spirax Sarco Tech 1.PppFarah OmarNoch keine Bewertungen