Das könnte Ihnen auch gefallen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Philips Qfu1.1ela 312278519211 ChassisDokument137 SeitenPhilips Qfu1.1ela 312278519211 ChassisPittiplatschNoch keine Bewertungen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- IET Learning OutcomesDokument36 SeitenIET Learning Outcomesg1974611Noch keine Bewertungen
- German 3Dokument19 SeitenGerman 30rkNoch keine Bewertungen
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Question Week 3Dokument11 SeitenQuestion Week 3Angelica May BangayanNoch keine Bewertungen
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Laser CommunicationDokument19 SeitenLaser CommunicationNeel VaniyaNoch keine Bewertungen
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- KUKA Controlador KRC4 PDFDokument211 SeitenKUKA Controlador KRC4 PDFfaspNoch keine Bewertungen
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- Linear Circuit AnalysisDokument45 SeitenLinear Circuit AnalysisAthar BaigNoch keine Bewertungen
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Harm Melker, Lincoln Submerged Arc Welding ...Dokument51 SeitenHarm Melker, Lincoln Submerged Arc Welding ...Marinel1955Noch keine Bewertungen
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Design of Low Noise Low Power Biopotential Tunable Amplifier Using Voltage Controlled Pseudo-Resistor For Biosignal Acquisition ApplicationsDokument5 SeitenDesign of Low Noise Low Power Biopotential Tunable Amplifier Using Voltage Controlled Pseudo-Resistor For Biosignal Acquisition ApplicationsSifat -Ul-AlamNoch keine Bewertungen
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- 19eee114 Lab4Dokument3 Seiten19eee114 Lab4Surya MurugesanNoch keine Bewertungen
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Beee Lab Manual (Ec)Dokument33 SeitenBeee Lab Manual (Ec)PIYUSH KUMARNoch keine Bewertungen
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Infinity Reference 5350 CarampDokument26 SeitenInfinity Reference 5350 CarampatukbarazaNoch keine Bewertungen
- Control-X Company Profile Presentation For Distributors 1-26Dokument26 SeitenControl-X Company Profile Presentation For Distributors 1-26Rafa TejedaNoch keine Bewertungen
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- ACS712 DatasheetDokument15 SeitenACS712 DatasheetHernan PorriniNoch keine Bewertungen
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- A Low Cost Automatic Curve Tracer PDFDokument5 SeitenA Low Cost Automatic Curve Tracer PDFuditagarwal1997Noch keine Bewertungen
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Directional Microphone Without Parabolic ReflectorDokument3 SeitenDirectional Microphone Without Parabolic Reflectordetroit_me2553Noch keine Bewertungen
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- Monolithic Amplifier: Dc-4 GHZDokument21 SeitenMonolithic Amplifier: Dc-4 GHZЕвгений ИвановNoch keine Bewertungen
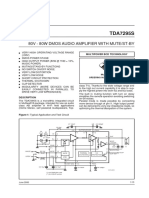
- TDA7295S: 80V - 80W Dmos Audio Amplifier With Mute/St-ByDokument13 SeitenTDA7295S: 80V - 80W Dmos Audio Amplifier With Mute/St-ByLucio DeschiNoch keine Bewertungen
- Data SheetDokument11 SeitenData SheetWildanNoch keine Bewertungen
- 74F04Dokument8 Seiten74F04frankkubaNoch keine Bewertungen
- 1000w InverterDokument7 Seiten1000w Invertermeerhamza0% (1)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- TLC 081Dokument35 SeitenTLC 081Félix PérezNoch keine Bewertungen
- Hafler XL-280 Service ManualDokument20 SeitenHafler XL-280 Service ManualArthur CarrNoch keine Bewertungen
- Fichas Técnicas - Sistema de Extinción PDFDokument565 SeitenFichas Técnicas - Sistema de Extinción PDFJhonnySilvaNoch keine Bewertungen
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Brushless Excitation SystemDokument26 SeitenBrushless Excitation SystemManish TiwariNoch keine Bewertungen
- Coupling & DecouplingDokument12 SeitenCoupling & DecouplingCezanne Cruz100% (1)
- Expt 9 BJT Two Stage AmplifierDokument7 SeitenExpt 9 BJT Two Stage Amplifiersamarth100% (1)
- Emona DATEx Vol1 LabManual E2 Student v3Dokument400 SeitenEmona DATEx Vol1 LabManual E2 Student v3Tom Kigezi0% (1)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (120)
- GBPPR 'Zine - Issue #48Dokument55 SeitenGBPPR 'Zine - Issue #48GBPPRNoch keine Bewertungen
- Active and Passive Electrical ComponentsDokument7 SeitenActive and Passive Electrical ComponentsHannahNoch keine Bewertungen
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)