Das könnte Ihnen auch gefallen
- 14 Desempenho AeronavesDokument4 Seiten14 Desempenho AeronavesIvo AlvesNoch keine Bewertungen
- Tornar Pen Drive BootavelDokument2 SeitenTornar Pen Drive BootavelIvo AlvesNoch keine Bewertungen
- Edital de Credenciamento Peritos CPTECDokument16 SeitenEdital de Credenciamento Peritos CPTECIvo AlvesNoch keine Bewertungen
- As Forcas No AviaoDokument7 SeitenAs Forcas No AviaoIvo AlvesNoch keine Bewertungen
- Consul Plan Edital Abertura Inscricoes Concurso TSE 2011 Vfina5091Dokument30 SeitenConsul Plan Edital Abertura Inscricoes Concurso TSE 2011 Vfina5091André DantasNoch keine Bewertungen
- Art VICHI Energia Meio Ambiente e Economia o Brasil 2009Dokument12 SeitenArt VICHI Energia Meio Ambiente e Economia o Brasil 2009Ivo AlvesNoch keine Bewertungen
- Texto 1Dokument2 SeitenTexto 1Ivo AlvesNoch keine Bewertungen
- 12 Aerodinamica Alta VelocidadeDokument2 Seiten12 Aerodinamica Alta VelocidadeIvo AlvesNoch keine Bewertungen
- Texto 1Dokument2 SeitenTexto 1Ivo AlvesNoch keine Bewertungen
- Calendário Acadêmico PosDokument1 SeiteCalendário Acadêmico PosIvo AlvesNoch keine Bewertungen
- Projeto motor foguete LOX/etanolDokument34 SeitenProjeto motor foguete LOX/etanolIvo AlvesNoch keine Bewertungen
- LinksDokument1 SeiteLinksIvo AlvesNoch keine Bewertungen
- TCC Tese2Dokument54 SeitenTCC Tese2Ivo AlvesNoch keine Bewertungen
- Modelando Sistemas Térmicos com EESDokument6 SeitenModelando Sistemas Térmicos com EESWênio AlencarNoch keine Bewertungen
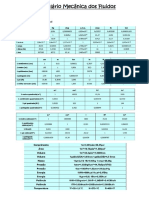
- Formulário Mecânica Dos Fluidos23Dokument4 SeitenFormulário Mecânica Dos Fluidos23Ivo AlvesNoch keine Bewertungen
- Calendário Acadêmico PosDokument1 SeiteCalendário Acadêmico PosIvo AlvesNoch keine Bewertungen
- 1 Questao 2010 - InérciaRotacionalDokument10 Seiten1 Questao 2010 - InérciaRotacionalIvo AlvesNoch keine Bewertungen
- BombasDokument2 SeitenBombasRoberto LaraNoch keine Bewertungen
- Apostila - Proteo e Segurana de Aerdromos - 2012Dokument48 SeitenApostila - Proteo e Segurana de Aerdromos - 2012giant360Noch keine Bewertungen
- Como Funcionam Os ElevadoresDokument11 SeitenComo Funcionam Os Elevadoresjlabrj2011Noch keine Bewertungen
- Vib Forcadas PDFDokument14 SeitenVib Forcadas PDFEdificações Ifb de BrasiliaNoch keine Bewertungen
- 0 - Aula de Bomba - 2007 - CompletaDokument26 Seiten0 - Aula de Bomba - 2007 - CompletaDGG2010Noch keine Bewertungen
- KanbanDokument8 SeitenKanbanEloina Monteiro SousaNoch keine Bewertungen
- Compressores alternativos: funcionamento e componentesDokument16 SeitenCompressores alternativos: funcionamento e componentesDenis Marcos100% (1)
- Ética e Moral: diferenças e semelhançasDokument26 SeitenÉtica e Moral: diferenças e semelhançasIvo AlvesNoch keine Bewertungen
- Língua Espanhola: Reglas de AcentuaçãoDokument32 SeitenLíngua Espanhola: Reglas de AcentuaçãoIvo Alves100% (1)
- InglesDokument46 SeitenInglesAlessandra AlmeidaNoch keine Bewertungen
- Ajuste e TolerânciasDokument17 SeitenAjuste e TolerânciaslincolnluizNoch keine Bewertungen
- RaciocinioDokument72 SeitenRaciocinioIvo AlvesNoch keine Bewertungen
- Manual Do MV ReportDokument43 SeitenManual Do MV ReportGerson De CristoNoch keine Bewertungen
- Banco de Dados - Volume 2 PDFDokument78 SeitenBanco de Dados - Volume 2 PDFGeorge FelixNoch keine Bewertungen
- O ensino de gêneros textuais no componente Rumo à Redação Nota 1000Dokument104 SeitenO ensino de gêneros textuais no componente Rumo à Redação Nota 1000Maria VeigaNoch keine Bewertungen
- Guia Estatística Aplicada A Ciencias Sociais VFFDokument235 SeitenGuia Estatística Aplicada A Ciencias Sociais VFFassia rajaNoch keine Bewertungen
- Plano - Ensino - 8º AnoDokument6 SeitenPlano - Ensino - 8º AnoRivaldo Luiz CamargoNoch keine Bewertungen
- Indicadores Socio-Demograficos - Mocambique 20062022Dokument54 SeitenIndicadores Socio-Demograficos - Mocambique 20062022Milton MatedianeNoch keine Bewertungen
- Troubleshooting do sistema ZeusDokument17 SeitenTroubleshooting do sistema ZeusLeandro Ademar100% (1)
- Sistema de Acompanhamento de Medições AnemométricasDokument42 SeitenSistema de Acompanhamento de Medições AnemométricasLuiz CarlosNoch keine Bewertungen
- Prova 7Dokument4 SeitenProva 7Gabriel Bueno0% (2)
- Módulo 3 - Aprovações Do Afastamento A Serviço, Execução Financeira e FaturamentoDokument42 SeitenMódulo 3 - Aprovações Do Afastamento A Serviço, Execução Financeira e FaturamentoDeilton Anastácio0% (1)
- Relatorio Estagio 2 Engenharia de ProducaoDokument5 SeitenRelatorio Estagio 2 Engenharia de ProducaoNicolas FloresNoch keine Bewertungen
- Implementação da linguagem funcional HaskellDokument11 SeitenImplementação da linguagem funcional HaskellJoao MachadoNoch keine Bewertungen
- Delegação da Massinga sobre Estatística EducacionalDokument43 SeitenDelegação da Massinga sobre Estatística Educacionaldaniel pascoal100% (4)
- A Metodologia de Pesquisa em Sociolinguística (ARTIGO)Dokument8 SeitenA Metodologia de Pesquisa em Sociolinguística (ARTIGO)Luisa CarolinaNoch keine Bewertungen
- SAP FI - Criar Nota de Crédito FornecedorDokument7 SeitenSAP FI - Criar Nota de Crédito FornecedorLuis Mariano Garcia MeridaNoch keine Bewertungen
- Tipos de Dados em Banco de DadosDokument31 SeitenTipos de Dados em Banco de DadosKaio PradoNoch keine Bewertungen
- Pesquisa de Mercado e EstatísticaDokument97 SeitenPesquisa de Mercado e EstatísticajanainaNoch keine Bewertungen
- Sistemas de Informação em Saúde - Possibilidades e DesafiosDokument10 SeitenSistemas de Informação em Saúde - Possibilidades e DesafiosPauloNoch keine Bewertungen
- SFC BT Apontamento Modelo 2 PMAN002 1684 1Dokument11 SeitenSFC BT Apontamento Modelo 2 PMAN002 1684 1Alessandre MarcelinoNoch keine Bewertungen
- Pesquisa de Levantamento: Material Completo, Procedimentos e ExemplosDokument14 SeitenPesquisa de Levantamento: Material Completo, Procedimentos e ExemplosThamella OrsiolliNoch keine Bewertungen
- Protocolo Corrido-FinalDokument27 SeitenProtocolo Corrido-FinalBreezy BossNoch keine Bewertungen
- Pillar1 Attn PORT PDFDokument24 SeitenPillar1 Attn PORT PDFCristinaAlves100% (1)
- Arquitetura OracleDokument33 SeitenArquitetura OracleSmaylle NobreNoch keine Bewertungen
- Aplicação Do Modelo 4 Etapas Com o Auxílio Do Software TransCAD No Campus Darcy Ribeiro.Dokument19 SeitenAplicação Do Modelo 4 Etapas Com o Auxílio Do Software TransCAD No Campus Darcy Ribeiro.Lucas FrançaNoch keine Bewertungen
- Guia passo a passo para solicitação de emissão de CA no sistema CAEPIDokument25 SeitenGuia passo a passo para solicitação de emissão de CA no sistema CAEPIabud_pedro8001Noch keine Bewertungen
- FluidMed - Relatório USP-SP MedCursoDokument11 SeitenFluidMed - Relatório USP-SP MedCursoANDREI MATOSNoch keine Bewertungen
- M700 Manual de Programação (Sistema Centro Máquina)Dokument551 SeitenM700 Manual de Programação (Sistema Centro Máquina)Vinicius Aguiar RochaNoch keine Bewertungen
- Arquitetura de Computadores e Hardware - UN2 - Vídeo 03Dokument13 SeitenArquitetura de Computadores e Hardware - UN2 - Vídeo 03Sufismo, O Caminho Místico Do IslamNoch keine Bewertungen
- Material de Apoio Parte 1 FCI 2010 2Dokument12 SeitenMaterial de Apoio Parte 1 FCI 2010 2Mateus MadeiraNoch keine Bewertungen
- Aula 2Dokument23 SeitenAula 2Antônio ArapiracaNoch keine Bewertungen