Das könnte Ihnen auch gefallen
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- JIMMA Electrical&ComputerEngDokument219 SeitenJIMMA Electrical&ComputerEngTewodros71% (7)
- Domesticity and Power in The Early Mughal WorldDokument17 SeitenDomesticity and Power in The Early Mughal WorldUjjwal Gupta100% (1)
- 1Dokument2 Seiten1TrầnLanNoch keine Bewertungen
- Department of Education: Raiseplus Weekly Plan For Blended LearningDokument3 SeitenDepartment of Education: Raiseplus Weekly Plan For Blended LearningMARILYN CONSIGNANoch keine Bewertungen
- Eng Notes2Dokument10 SeitenEng Notes2Arti KapurNoch keine Bewertungen
- Investigation Data FormDokument1 SeiteInvestigation Data Formnildin danaNoch keine Bewertungen
- Writ Petition 21992 of 2019 FinalDokument22 SeitenWrit Petition 21992 of 2019 FinalNANDANI kumariNoch keine Bewertungen
- Employee of The Month.Dokument2 SeitenEmployee of The Month.munyekiNoch keine Bewertungen
- Formato MultimodalDokument1 SeiteFormato MultimodalcelsoNoch keine Bewertungen
- Polyether Polyol Production AssignmentDokument9 SeitenPolyether Polyol Production AssignmentanurdiaNoch keine Bewertungen
- EPMS System Guide For Subcontractor - V1 2Dokument13 SeitenEPMS System Guide For Subcontractor - V1 2AdouaneNassim100% (2)
- Creating A Research Space (C.A.R.S.) ModelDokument5 SeitenCreating A Research Space (C.A.R.S.) ModelNazwa MustikaNoch keine Bewertungen
- Study Notes - Google Project Management Professional CertificateDokument4 SeitenStudy Notes - Google Project Management Professional CertificateSWAPNIL100% (1)
- Celula de CargaDokument2 SeitenCelula de CargaDavid PaezNoch keine Bewertungen
- 02 CT311 Site WorksDokument26 Seiten02 CT311 Site Worksshaweeeng 101Noch keine Bewertungen
- S-Sapfico-Satyanarayanamaterial 121212Dokument183 SeitenS-Sapfico-Satyanarayanamaterial 121212mpsing1133Noch keine Bewertungen
- Emerging Technology SyllabusDokument6 SeitenEmerging Technology Syllabussw dr100% (4)
- Bharti Airtel Strategy FinalDokument39 SeitenBharti Airtel Strategy FinalniksforloveuNoch keine Bewertungen
- Sharat Babu Digumarti Vs State, Govt. of NCT of Delhi (Bazee - Com Case, Appeal) - Information Technology ActDokument17 SeitenSharat Babu Digumarti Vs State, Govt. of NCT of Delhi (Bazee - Com Case, Appeal) - Information Technology ActRavish Rana100% (1)
- Outlook of PonDokument12 SeitenOutlook of Ponty nguyenNoch keine Bewertungen
- Ships Near A Rocky Coast With Awaiting Landing PartyDokument2 SeitenShips Near A Rocky Coast With Awaiting Landing PartyFouaAj1 FouaAj1Noch keine Bewertungen
- An Enhanced Radio Network Planning Methodology For GSM-R CommunicationsDokument4 SeitenAn Enhanced Radio Network Planning Methodology For GSM-R CommunicationsNuno CotaNoch keine Bewertungen
- MEMORANDUM OF AGREEMENT DraftsDokument3 SeitenMEMORANDUM OF AGREEMENT DraftsRichard Colunga80% (5)
- Chapter 4: Thermal ComfortDokument16 SeitenChapter 4: Thermal ComfortWengelNoch keine Bewertungen
- BarricadeDokument6 SeitenBarricadeJithu PappachanNoch keine Bewertungen
- Less Homework More TroubleDokument7 SeitenLess Homework More Troubleg697a0mw100% (1)
- FluteDokument13 SeitenFlutefisher3910% (1)
- Guidelines For Doing Business in Grenada & OECSDokument14 SeitenGuidelines For Doing Business in Grenada & OECSCharcoals Caribbean GrillNoch keine Bewertungen
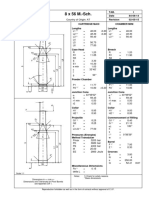
- 8 X 56 M.-SCH.: Country of Origin: ATDokument1 Seite8 X 56 M.-SCH.: Country of Origin: ATMohammed SirelkhatimNoch keine Bewertungen
- CV Ashish PDFDokument3 SeitenCV Ashish PDFRoshan KejariwalNoch keine Bewertungen