Das könnte Ihnen auch gefallen
- Problemas resueltos de Hidráulica de CanalesVon EverandProblemas resueltos de Hidráulica de CanalesBewertung: 4.5 von 5 Sternen4.5/5 (7)
- 8 Plan de Seguridad y Salud en El TrabajoDokument22 Seiten8 Plan de Seguridad y Salud en El TrabajoRob Herdez100% (5)
- Ingeniería química. Soluciones a los problemas del tomo IVon EverandIngeniería química. Soluciones a los problemas del tomo INoch keine Bewertungen
- Análisis estructural mediante el método de los elementos finitos. Introducción al comportamiento lineal elásticoVon EverandAnálisis estructural mediante el método de los elementos finitos. Introducción al comportamiento lineal elásticoBewertung: 4.5 von 5 Sternen4.5/5 (12)
- Pathfinder 1 Ed. Guía de KorvosaDokument68 SeitenPathfinder 1 Ed. Guía de Korvosaamapola sanhuezaNoch keine Bewertungen
- Razonamiento cuantitativo, 2ª edición: Notas de claseVon EverandRazonamiento cuantitativo, 2ª edición: Notas de claseBewertung: 5 von 5 Sternen5/5 (1)
- Ejercicios de Integrales y Ecuaciones Integrales-DiferencialesVon EverandEjercicios de Integrales y Ecuaciones Integrales-DiferencialesNoch keine Bewertungen
- Métodos Matriciales para ingenieros con MATLABVon EverandMétodos Matriciales para ingenieros con MATLABBewertung: 5 von 5 Sternen5/5 (1)
- Guía para el análisis y solución de problemas de resistencia de materialesVon EverandGuía para el análisis y solución de problemas de resistencia de materialesNoch keine Bewertungen
- Sistema Masa Resorte AmortiguadorDokument9 SeitenSistema Masa Resorte AmortiguadorJose Manuel0% (1)
- Latin1 PDFDokument83 SeitenLatin1 PDFfuvebaNoch keine Bewertungen
- Dinamica EstructuralDokument31 SeitenDinamica EstructuralKattya J. Pilco100% (1)
- Ejercicios Resueltos ZillDokument265 SeitenEjercicios Resueltos ZillJ Deep AguirreNoch keine Bewertungen
- Ejercicios Resueltos VibracionesDokument10 SeitenEjercicios Resueltos VibracionesDeiner Zapata SilvaNoch keine Bewertungen
- Sistema Masa-Resorte Movimiento Forzado Con AmortiguamientoDokument7 SeitenSistema Masa-Resorte Movimiento Forzado Con AmortiguamientoGomez Guzman0% (1)
- Tesina Final Terminada Derecho Al Olvido - Simón Ortega GotschlichDokument39 SeitenTesina Final Terminada Derecho Al Olvido - Simón Ortega GotschlichSIMON PASCAL ORTEGA GOTSCHLICHNoch keine Bewertungen
- Contrato Especial EmergenteDokument2 SeitenContrato Especial EmergenteMaria Jose Guaman100% (2)
- 9-Ecuaciones Diferenciales Primer OrdenDokument8 Seiten9-Ecuaciones Diferenciales Primer OrdenMiguel Angel Saravia CuevaNoch keine Bewertungen
- Anillos Cerámicos-AcotecDokument31 SeitenAnillos Cerámicos-AcotecLucas Nieva100% (1)
- Sistemas Dinámicos Varios Grados de LibertadDokument50 SeitenSistemas Dinámicos Varios Grados de LibertadTedder Aquino YupanquiNoch keine Bewertungen
- La ecuación general de segundo grado en dos y tres variablesVon EverandLa ecuación general de segundo grado en dos y tres variablesNoch keine Bewertungen
- Ejercicios de Integrales de Línea, Superficie y VolumenVon EverandEjercicios de Integrales de Línea, Superficie y VolumenBewertung: 4 von 5 Sternen4/5 (2)
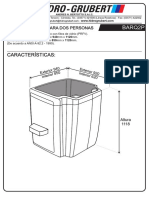
- Barquilla PRFV para 2 PersonasDokument1 SeiteBarquilla PRFV para 2 PersonasLucas NievaNoch keine Bewertungen
- Vibracion Libre SubamortiguadaDokument25 SeitenVibracion Libre SubamortiguadaGuillermo Pérez100% (2)
- Anillos Disipadores de EnergiaDokument4 SeitenAnillos Disipadores de EnergiaLucas Nieva50% (2)
- Contrato de Arrendamiento y Exhibición de Panel 3 y 4Dokument6 SeitenContrato de Arrendamiento y Exhibición de Panel 3 y 4Ricardo RiveraNoch keine Bewertungen
- Geometric modeling in computer: Aided geometric designVon EverandGeometric modeling in computer: Aided geometric designNoch keine Bewertungen
- LorenaDokument52 SeitenLorenalorena numpaqueNoch keine Bewertungen
- Vibraciones MecanicasDokument11 SeitenVibraciones MecanicasGary Jonathan Morales AlvaradoNoch keine Bewertungen
- WuolahP-Examen Resuelto Primer Parcial 1Dokument6 SeitenWuolahP-Examen Resuelto Primer Parcial 1Carlos BlancasNoch keine Bewertungen
- Solucion Ecuacion Espacio de Estado (1) Teoria de ControlDokument29 SeitenSolucion Ecuacion Espacio de Estado (1) Teoria de ControlVic RiveroNoch keine Bewertungen
- Ecuaciones Lineales de Orden SuperiorDokument9 SeitenEcuaciones Lineales de Orden SuperiorFernando RodríguezNoch keine Bewertungen
- L01 Sismo - UglDokument43 SeitenL01 Sismo - UglJavierNoch keine Bewertungen
- Ejercicios Resueltos EDDokument265 SeitenEjercicios Resueltos EDLuis Fe DNoch keine Bewertungen
- Aplicaciones de Las Ecuaciones Diferenciales de Segundo Orden2Dokument10 SeitenAplicaciones de Las Ecuaciones Diferenciales de Segundo Orden2Pame EspejoNoch keine Bewertungen
- Separata 1 Civil Febrero 2019Dokument7 SeitenSeparata 1 Civil Febrero 2019TommyNoch keine Bewertungen
- Etapa2 243005 36Dokument14 SeitenEtapa2 243005 36Sneider AlvarezNoch keine Bewertungen
- Taller Oscilaciones y OndasDokument15 SeitenTaller Oscilaciones y OndasNadieKJNoch keine Bewertungen
- Vibraciones Libres - TRABAJO 1Dokument7 SeitenVibraciones Libres - TRABAJO 1Fernando Vilca CoronadoNoch keine Bewertungen
- Practica 2.modelado y Simulación de Sistemas DinamicosDokument11 SeitenPractica 2.modelado y Simulación de Sistemas DinamicosGerald Saint Silva Urdaneta100% (1)
- 10va Practica CalificadaDokument10 Seiten10va Practica CalificadaLuis Quispe QuispeNoch keine Bewertungen
- Clase MatematicasDokument82 SeitenClase MatematicasAh_DiantreNoch keine Bewertungen
- Aplicacion Sistema MecanicoDokument12 SeitenAplicacion Sistema MecanicoSantiago ValverdeNoch keine Bewertungen
- Repaso 1Dokument16 SeitenRepaso 1Ernesto RQNoch keine Bewertungen
- Preguntas Teoricas de Matematicas Avanzada..Dokument15 SeitenPreguntas Teoricas de Matematicas Avanzada..AbrahamRenteriaNoch keine Bewertungen
- Sistemas de 1 Grado de LibertadDokument18 SeitenSistemas de 1 Grado de LibertadJEFFERSON0419Noch keine Bewertungen
- Modelos en Tiempo DiscretoDokument41 SeitenModelos en Tiempo DiscretoMichael ßermeoNoch keine Bewertungen
- Trabajo Ecuaciones DiferencialesDokument99 SeitenTrabajo Ecuaciones DiferencialesEdison QuinapalloNoch keine Bewertungen
- Proyecto Aula - Analisis 2Dokument21 SeitenProyecto Aula - Analisis 2mazaga260102Noch keine Bewertungen
- E Ejercicios Resueltos Analisis Lineal Ecuaciones Diferenciales Ordinarias de Segundo OrdenDokument9 SeitenE Ejercicios Resueltos Analisis Lineal Ecuaciones Diferenciales Ordinarias de Segundo OrdenJavier MartinezNoch keine Bewertungen
- TP #6 Mediciones y EnsayosDokument9 SeitenTP #6 Mediciones y EnsayosLucas NievaNoch keine Bewertungen
- 12-Geometria de La DireccionDokument4 Seiten12-Geometria de La DireccionLucas NievaNoch keine Bewertungen
- Movimientos OscilatoriosDokument26 SeitenMovimientos OscilatoriosNicol Salamanca MurgasNoch keine Bewertungen
- 1 - 1 Ingeniería de Planta - Alcances de La Ingeniería de Un ProyectoDokument45 Seiten1 - 1 Ingeniería de Planta - Alcances de La Ingeniería de Un ProyectoLucas Nieva100% (1)
- TP1Dokument47 SeitenTP1Lucas NievaNoch keine Bewertungen
- Tpn2 Oleoductos y GasoductosDokument33 SeitenTpn2 Oleoductos y GasoductosLucas NievaNoch keine Bewertungen
- Primera Prueba Derecho PenalDokument3 SeitenPrimera Prueba Derecho PenalYosselin EsparzaNoch keine Bewertungen
- Visitación Andrade Fiorela IvoneDokument74 SeitenVisitación Andrade Fiorela IvoneJohan ZavaletaNoch keine Bewertungen
- Articulo 23Dokument2 SeitenArticulo 23mf-parionaNoch keine Bewertungen
- Fuero Indigena Colombia - RoldánDokument29 SeitenFuero Indigena Colombia - RoldánArel King Ariel KingNoch keine Bewertungen
- Acta Notarial Protocolizada - Acreditar Resultados de SorteoDokument2 SeitenActa Notarial Protocolizada - Acreditar Resultados de SorteoAlexis CruzNoch keine Bewertungen
- Acreditación Mantos BlancosDokument4 SeitenAcreditación Mantos BlancosCRISTINACUEVAS1Noch keine Bewertungen
- Codigo Organico Procesal PenalDokument132 SeitenCodigo Organico Procesal PenalMarco Antonio100% (17)
- Trabajo Práctico Derecho Administrativo 3-12Dokument11 SeitenTrabajo Práctico Derecho Administrativo 3-12Either GaelNoch keine Bewertungen
- Modifican El Reglamento Del Código de Ejecución Penal Aprobado Por Decreto Supremo #015-2003-JUSDokument2 SeitenModifican El Reglamento Del Código de Ejecución Penal Aprobado Por Decreto Supremo #015-2003-JUSFidel Francisco Quispe HinostrozaNoch keine Bewertungen
- Oblicaciones Civiles y ComercialesDokument21 SeitenOblicaciones Civiles y Comercialesnazarenagardenal03Noch keine Bewertungen
- Persona Natural y Persona JuridicaDokument3 SeitenPersona Natural y Persona JuridicaMaykol Zegarra100% (1)
- Acepciones de La Palabra Derecho PenalDokument6 SeitenAcepciones de La Palabra Derecho PenalAbigail BelenNoch keine Bewertungen
- QUEJA Ante La ODECMA de Fecha 20 de Octubre 2016Dokument2 SeitenQUEJA Ante La ODECMA de Fecha 20 de Octubre 2016Edgar Martinez Galindo100% (1)
- Linea de Tiempo - Medicina PreventivaDokument24 SeitenLinea de Tiempo - Medicina PreventivaAngie Melissa GUTIERREZ GONZALEZNoch keine Bewertungen
- Ejercicios ResueltoDokument92 SeitenEjercicios ResueltoMonica Sana100% (1)
- El Museo Pictorico y Escala Óptica PDFDokument439 SeitenEl Museo Pictorico y Escala Óptica PDFIjyel Villa100% (1)
- Denunciaron Al Gobernador Manzur y A Funcionarios de La Salud y La Justicia Por Obstaculizar El Aborto LegalDokument11 SeitenDenunciaron Al Gobernador Manzur y A Funcionarios de La Salud y La Justicia Por Obstaculizar El Aborto LegalTodo NoticiasNoch keine Bewertungen
- Métodos CoercitivosDokument9 SeitenMétodos CoercitivosDavid García SánchezNoch keine Bewertungen
- INTIMACIÓN DE PAGO de AlquliresDokument12 SeitenINTIMACIÓN DE PAGO de AlquliresAnthony BanderaNoch keine Bewertungen
- El Matrimonio Como Acto, Los Responsables, Su Definición, Impedimentos para Contraer MatrimoniosDokument5 SeitenEl Matrimonio Como Acto, Los Responsables, Su Definición, Impedimentos para Contraer MatrimoniosJhose Garcia Barreto57% (7)
- Asiento SDokument11 SeitenAsiento SEdy CPazNoch keine Bewertungen
- Preguntas de SimulacroDokument4 SeitenPreguntas de Simulacrobellaluz_2350% (2)
- Contrato LA MONTAÑADokument3 SeitenContrato LA MONTAÑAFryda RamosNoch keine Bewertungen
- Observo Liquidacion de Intereses Exp #5294-2015-44Dokument9 SeitenObservo Liquidacion de Intereses Exp #5294-2015-44claudiaNoch keine Bewertungen