Das könnte Ihnen auch gefallen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (587)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2219)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (265)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (119)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Improve company operations with a functional ISM projectDokument10 SeitenImprove company operations with a functional ISM projectSachin BorkkarNoch keine Bewertungen
- 0001 0 General Nobel DentonDokument50 Seiten0001 0 General Nobel DentonPeyman MznNoch keine Bewertungen
- Iso 9001:2008 Pre-TestDokument2 SeitenIso 9001:2008 Pre-TestMau TauNoch keine Bewertungen
- As 2359.2-1985 Industrial Trucks (Known As The SAA Industrial Truck Code) OperationDokument9 SeitenAs 2359.2-1985 Industrial Trucks (Known As The SAA Industrial Truck Code) OperationSAI Global - APAC0% (1)
- 11188-04 InstructivoDokument20 Seiten11188-04 InstructivoLuis AlonsoNoch keine Bewertungen
- Rfid Nov'11eng 4Dokument23 SeitenRfid Nov'11eng 4hydisNoch keine Bewertungen
- 2 Giuliano Forghieri Customisation vs. Standardisation Paradox in The Hospitality IndustryDokument11 Seiten2 Giuliano Forghieri Customisation vs. Standardisation Paradox in The Hospitality IndustryOnur YamanNoch keine Bewertungen
- North Sea AtlasDokument483 SeitenNorth Sea Atlasjacek_sawicz100% (2)
- INDE 513 hw1 SolDokument7 SeitenINDE 513 hw1 SolWei GuoNoch keine Bewertungen
- Irpa SapDokument13 SeitenIrpa SapDINESHNoch keine Bewertungen
- NCAR AIP 2010 AerodromeDokument170 SeitenNCAR AIP 2010 AerodromeAbhishek Man ShresthaNoch keine Bewertungen
- PEI Trucking Sector - 2010: DefinitionDokument3 SeitenPEI Trucking Sector - 2010: Definitionn3xtnetworkNoch keine Bewertungen
- Work at HeightDokument10 SeitenWork at HeightShoaib RazzaqNoch keine Bewertungen
- 2012-11-28 VodafonePartnership en PDFDokument9 Seiten2012-11-28 VodafonePartnership en PDFLuis Augusto CarvalhoNoch keine Bewertungen
- C-157: Three Coat Epoxy Coating Spec for Seawater ImmersionDokument11 SeitenC-157: Three Coat Epoxy Coating Spec for Seawater ImmersionKong Hu LeeNoch keine Bewertungen
- Application of AC Motors and Drives in Steel Industries: A K Paul, I Banerjee, B K Santra and N NeogiDokument5 SeitenApplication of AC Motors and Drives in Steel Industries: A K Paul, I Banerjee, B K Santra and N NeogiMohamed Elsaid El ShallNoch keine Bewertungen
- Test Chapter FiveDokument23 SeitenTest Chapter FiveMajid797100% (1)
- Endurance Dyform 34lrDokument4 SeitenEndurance Dyform 34lrEduardo RateikeNoch keine Bewertungen
- Technical Proposal Template SampleDokument12 SeitenTechnical Proposal Template SampleWrite Bagga100% (1)
- Cif PmiDokument1 SeiteCif PmiC.K DavisNoch keine Bewertungen
- XSitePro EssentialsDokument266 SeitenXSitePro EssentialsZoran RandjelovicNoch keine Bewertungen
- X Ce Series Catalog PagesDokument15 SeitenX Ce Series Catalog PagessourcNoch keine Bewertungen
- Lapp PI 0010000 ENDokument5 SeitenLapp PI 0010000 ENblackboydl0101Noch keine Bewertungen
- Why Do You Say That Project Management Is The Best Method of Implementing ChangeDokument10 SeitenWhy Do You Say That Project Management Is The Best Method of Implementing ChangeFaisal HameedNoch keine Bewertungen
- Roopa Rani - Final PDFDokument52 SeitenRoopa Rani - Final PDFSrinivas SeenuNoch keine Bewertungen
- 3 4 1h A SurveyproblemhomeworkDokument10 Seiten3 4 1h A Surveyproblemhomeworkapi-300375532Noch keine Bewertungen
- TBC Catalogue No8 July 07 - PDF Small For WebsiteDokument202 SeitenTBC Catalogue No8 July 07 - PDF Small For WebsitesandulupeniNoch keine Bewertungen
- Method - New Isodraft Symbol For Piping Component PDFDokument10 SeitenMethod - New Isodraft Symbol For Piping Component PDFkaruna346100% (3)
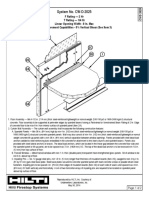
- System No. CW-D-2025: Linear Opening Width - 8 In. Max Class II Movement Capabilities - 5% Vertical Shear (See Item 3)Dokument2 SeitenSystem No. CW-D-2025: Linear Opening Width - 8 In. Max Class II Movement Capabilities - 5% Vertical Shear (See Item 3)aNoch keine Bewertungen
- Presentation Automobile HistoryDokument17 SeitenPresentation Automobile HistoryWaleed WasimNoch keine Bewertungen