Das könnte Ihnen auch gefallen
- Advanced Machine Code ProgrammingDokument259 SeitenAdvanced Machine Code Programminglordbubsy100% (2)
- Ic NotesDokument125 SeitenIc NoteskalangeNoch keine Bewertungen
- Vacuum Triode Amplifier - Floyd SweetDokument15 SeitenVacuum Triode Amplifier - Floyd SweetharishkumarsinghNoch keine Bewertungen
- Cyient Transmit and Receive Module For Radar SystemsDokument4 SeitenCyient Transmit and Receive Module For Radar SystemsPercy100% (1)
- Signal GsDokument50 SeitenSignal GsHowardNoch keine Bewertungen
- Spread Spectrum and CDMA: Principles and ApplicationsVon EverandSpread Spectrum and CDMA: Principles and ApplicationsNoch keine Bewertungen
- Satellite Communication OrbitsDokument156 SeitenSatellite Communication OrbitsKunal DixitNoch keine Bewertungen
- Underwater Substructure Inspection with Acoustic ImagingDokument13 SeitenUnderwater Substructure Inspection with Acoustic ImagingRajeuv GovindanNoch keine Bewertungen
- Foliage Penetration Radar. Detection and Characterization of Objects Under Trees - Mark E DavisDokument374 SeitenFoliage Penetration Radar. Detection and Characterization of Objects Under Trees - Mark E DavisRafael Manfrin Mendes100% (1)
- Aperture Coupled Patch Antenna Design MethodsDokument4 SeitenAperture Coupled Patch Antenna Design MethodsFranky Simanjuntak100% (1)
- Book-Data CommunicationDokument57 SeitenBook-Data CommunicationBindu Devender MahajanNoch keine Bewertungen
- 208H Service ManualDokument52 Seiten208H Service ManualclivesaitNoch keine Bewertungen
- Quantum Ag Instrument Users Manual 2017-05-01 v1 A4Dokument6 SeitenQuantum Ag Instrument Users Manual 2017-05-01 v1 A4StellaEstelNoch keine Bewertungen
- Baeam Forming MatlabDokument32 SeitenBaeam Forming Matlabvinayak341Noch keine Bewertungen
- Motion in The Ocean: Waves, Tides, and CurrentsDokument30 SeitenMotion in The Ocean: Waves, Tides, and CurrentsJohn Carlo Sacramento100% (1)
- SAR Image Formation Toolbox For MATLABDokument13 SeitenSAR Image Formation Toolbox For MATLABLissete VergaraNoch keine Bewertungen
- CST Horn AntennaDokument25 SeitenCST Horn Antenna이경희100% (3)
- 2010 AsprsDokument88 Seiten2010 Asprstuckerman66Noch keine Bewertungen
- General Facts About The Lidar TechniqueDokument29 SeitenGeneral Facts About The Lidar TechniqueCirkuito100% (1)
- Sar Image FormationDokument15 SeitenSar Image FormationMusyarofah HanafiNoch keine Bewertungen
- Introduction to Optical Waveguide Analysis: Solving Maxwell's Equation and the Schrödinger EquationVon EverandIntroduction to Optical Waveguide Analysis: Solving Maxwell's Equation and the Schrödinger EquationNoch keine Bewertungen
- Gps Receiver Design TutorialDokument3 SeitenGps Receiver Design TutorialPete100% (1)
- Introduction To RadarMWJDokument52 SeitenIntroduction To RadarMWJTeddy112Noch keine Bewertungen
- Electronic Warfare System 2015Dokument11 SeitenElectronic Warfare System 2015concept100% (1)
- Neutral GR ReactorDokument6 SeitenNeutral GR Reactorshasailappan0% (1)
- Teacher NotesDokument8 SeitenTeacher Notesapi-410486717Noch keine Bewertungen
- Radar Data and Relationships: Radar Bands Linear DB ScaleDokument2 SeitenRadar Data and Relationships: Radar Bands Linear DB ScaleSusana RojasNoch keine Bewertungen
- RADAR Probems (Eng)Dokument51 SeitenRADAR Probems (Eng)abd syNoch keine Bewertungen
- Aperture Coupled Fed Micro-Strip Patch AntennaDokument5 SeitenAperture Coupled Fed Micro-Strip Patch AntennaemremiranNoch keine Bewertungen
- Automatic Target Recognition: Fundamentals and ApplicationsVon EverandAutomatic Target Recognition: Fundamentals and ApplicationsNoch keine Bewertungen
- Experiments With MatlabDokument288 SeitenExperiments With MatlabLe Duy TuanNoch keine Bewertungen
- Multi-Standard Receiver DesignDokument54 SeitenMulti-Standard Receiver DesignWalid_Sassi_TunNoch keine Bewertungen
- 0-30 VDC Stabilized Power Supply With Current Control 0.002-3 ADokument12 Seiten0-30 VDC Stabilized Power Supply With Current Control 0.002-3 Anmgaby21Noch keine Bewertungen
- Introduction To Antenna Test Ranges Measurements InstrumentationDokument13 SeitenIntroduction To Antenna Test Ranges Measurements InstrumentationgnanalakshmiNoch keine Bewertungen
- Lecture #22: Synthetic Aperture Radar: Fundamentals of Radar Signal ProcessingDokument58 SeitenLecture #22: Synthetic Aperture Radar: Fundamentals of Radar Signal ProcessingMuhammad RizwanNoch keine Bewertungen
- Amazing Growth in Military Radar Antenna TechnologyDokument39 SeitenAmazing Growth in Military Radar Antenna Technologyagmnm1962100% (1)
- Real Time Implementation of Adaptive Beam Former For Phased Array Radar Over DSP KitDokument10 SeitenReal Time Implementation of Adaptive Beam Former For Phased Array Radar Over DSP KitAI Coordinator - CSC JournalsNoch keine Bewertungen
- IIT-BHU Literature Review of Direction Finding AntennasDokument29 SeitenIIT-BHU Literature Review of Direction Finding AntennasVaishali SinghNoch keine Bewertungen
- Ocean Propagation Models PDFDokument39 SeitenOcean Propagation Models PDFkumargpalaniNoch keine Bewertungen
- Range Resolution Improvement of FMCW RadarsDokument104 SeitenRange Resolution Improvement of FMCW RadarsLe Duy Trung0% (1)
- Designing Yagi AntennaDokument5 SeitenDesigning Yagi AntennaAsghar FarhadiNoch keine Bewertungen
- 725 Intro-F12Dokument98 Seiten725 Intro-F12Mahaboob SubahanNoch keine Bewertungen
- Thesis 11Dokument198 SeitenThesis 11tanvach100% (1)
- Sonar Interface LevelDokument85 SeitenSonar Interface LevelMuhammad Irfan EffendiNoch keine Bewertungen
- Low-Loss, Broadly-Tunable Cavity Filter Operating at UHF FrequenciesDokument4 SeitenLow-Loss, Broadly-Tunable Cavity Filter Operating at UHF FrequenciesDo SonNoch keine Bewertungen
- Unit 1Dokument46 SeitenUnit 1Mahendra ChennareddyNoch keine Bewertungen
- 2005 04 05 Hydrofest 3 - AcousticsDokument69 Seiten2005 04 05 Hydrofest 3 - AcousticsSt3fandragos4306Noch keine Bewertungen
- EE 370, Lecture 07Dokument5 SeitenEE 370, Lecture 07Peshal NayakNoch keine Bewertungen
- Datasheet SRM3006 EN PDFDokument20 SeitenDatasheet SRM3006 EN PDFMark LionNoch keine Bewertungen
- Phased Antenna Arrays and Application Wireless in Connectivity, BATCH 14Dokument63 SeitenPhased Antenna Arrays and Application Wireless in Connectivity, BATCH 14nareshNoch keine Bewertungen
- How To Measure LTEDokument13 SeitenHow To Measure LTEfarrukhmohammedNoch keine Bewertungen
- Waroth Thesis PDFDokument210 SeitenWaroth Thesis PDFWaroth KuhirunNoch keine Bewertungen
- Slot Antenna: A Radiator Made By Cutting A SlotDokument9 SeitenSlot Antenna: A Radiator Made By Cutting A SlotMarcos Marcelon Alcantara Abueva IIINoch keine Bewertungen
- Antenna EngineeringDokument21 SeitenAntenna Engineeringkartik080994Noch keine Bewertungen
- SDR in Direction Finding RFDesign 0105Dokument6 SeitenSDR in Direction Finding RFDesign 0105vaibhawamishra32Noch keine Bewertungen
- Complete Design of A Microstrip Line CouplerDokument6 SeitenComplete Design of A Microstrip Line CouplerJoe MullerNoch keine Bewertungen
- BAN Body Area Antenna PresentationDokument21 SeitenBAN Body Area Antenna PresentationYingying Chok100% (1)
- Radar (Electronics) - Britannica Online Encyclopedia PDFDokument12 SeitenRadar (Electronics) - Britannica Online Encyclopedia PDFJitendra PanwarNoch keine Bewertungen
- Parametric Excitation Model For Waveguide Piano Synthesis PDFDokument4 SeitenParametric Excitation Model For Waveguide Piano Synthesis PDFChoo Chee WeeNoch keine Bewertungen
- A Cavity Filter Using Stepped Impedance ResonatorDokument4 SeitenA Cavity Filter Using Stepped Impedance ResonatorDo SonNoch keine Bewertungen
- Design of FMCW Radars For Active Safety Applications PDFDokument5 SeitenDesign of FMCW Radars For Active Safety Applications PDFAnonymous LoJy6ERXdNoch keine Bewertungen
- Multi Radar Tracker MRTDokument4 SeitenMulti Radar Tracker MRTZayd Iskandar Dzolkarnain Al-HadramiNoch keine Bewertungen
- Ku Band RF ThesisDokument113 SeitenKu Band RF ThesisJohn ErhinyoNoch keine Bewertungen
- Models - Rf.circular Waveguide FilterDokument10 SeitenModels - Rf.circular Waveguide FilterDr-Mandeep SinghNoch keine Bewertungen
- Syntonics FSS AntennaBriefingDokument6 SeitenSyntonics FSS AntennaBriefinghillnerNoch keine Bewertungen
- Implementing Embedded Multi-Target TrackingDokument7 SeitenImplementing Embedded Multi-Target TrackingqasimNoch keine Bewertungen
- Doppler vs. FMCWDokument7 SeitenDoppler vs. FMCWomardahanNoch keine Bewertungen
- SatelliteDokument14 SeitenSatelliteapi-19800939Noch keine Bewertungen
- Resume Template New Graduate CombinedDokument3 SeitenResume Template New Graduate CombinedAmirul Fahmi SiditNoch keine Bewertungen
- Regsample2 Part 1 2 Use of EnglishDokument7 SeitenRegsample2 Part 1 2 Use of EnglishMustafa PehlivanNoch keine Bewertungen
- Regsample2 Part 1 2 3 Answer KeyDokument2 SeitenRegsample2 Part 1 2 3 Answer KeyMustafa PehlivanNoch keine Bewertungen
- Template Entry Level FunctionalDokument2 SeitenTemplate Entry Level FunctionaldennyyusufNoch keine Bewertungen
- EGYPT SAMPLE EXAM READING SECTIONDokument13 SeitenEGYPT SAMPLE EXAM READING SECTIONMustafa PehlivanNoch keine Bewertungen
- Agilent ADS Simulation and Design EnvironmentDokument3 SeitenAgilent ADS Simulation and Design EnvironmentMustafa PehlivanNoch keine Bewertungen
- Regsample1 Part 1 2 Use of EnglishDokument9 SeitenRegsample1 Part 1 2 Use of EnglishMustafa PehlivanNoch keine Bewertungen
- Regsample1 Part 1 2 3 Answer KeyDokument3 SeitenRegsample1 Part 1 2 3 Answer KeyMustafa PehlivanNoch keine Bewertungen
- Design of Ka-Band: Front End of Fully Polarized RadiometerDokument4 SeitenDesign of Ka-Band: Front End of Fully Polarized RadiometerMustafa PehlivanNoch keine Bewertungen
- Gonzalez SolutionDokument98 SeitenGonzalez SolutionMustafa PehlivanNoch keine Bewertungen
- Dual Operational Amplifier NJM4560Dokument4 SeitenDual Operational Amplifier NJM4560Félix GNoch keine Bewertungen
- Jntu Ece Syllabus 2005-2006Dokument50 SeitenJntu Ece Syllabus 2005-2006sreeramamurthyv100% (1)
- Prisma-Daps Manual-AndroidApp EN PDFDokument36 SeitenPrisma-Daps Manual-AndroidApp EN PDFHasan GhanoumNoch keine Bewertungen
- ELEC3405 Lab Notes Optical Communication SystemsDokument29 SeitenELEC3405 Lab Notes Optical Communication SystemssakilakumaresanNoch keine Bewertungen
- Wien Bridge Oscillator Design and AnalysisDokument16 SeitenWien Bridge Oscillator Design and Analysisahmed omarNoch keine Bewertungen
- That Corporation Grsign Note 109Dokument2 SeitenThat Corporation Grsign Note 109Anonymous Wyb8Y10% (1)
- 5 A 5Dokument13 Seiten5 A 5ElectromateNoch keine Bewertungen
- EC1311 Communication EngineeringDokument23 SeitenEC1311 Communication EngineeringVidya NeemuNoch keine Bewertungen
- Service Manual Text Edition: External SpeakerDokument244 SeitenService Manual Text Edition: External SpeakerVicente CardosoNoch keine Bewertungen
- Válvula KCG 03Dokument11 SeitenVálvula KCG 03CristianNoch keine Bewertungen
- Lecture 14 Low Noise Amplifier DesignDokument67 SeitenLecture 14 Low Noise Amplifier Designlyz13312772Noch keine Bewertungen
- Syllabus For Apece, University of DhakaDokument20 SeitenSyllabus For Apece, University of DhakaSazzad Hossain LemonNoch keine Bewertungen
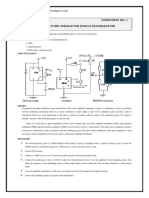
- PAMDokument11 SeitenPAMMarco Alejandro Teran AguilarNoch keine Bewertungen
- ACF 9-Pin PDFDokument13 SeitenACF 9-Pin PDFDragoslav IvankovicNoch keine Bewertungen
- Smart700hg ManualDokument48 SeitenSmart700hg ManualAriagna Machado RicardoNoch keine Bewertungen
- Team Revolver: EP 391 MicroprocessorsDokument21 SeitenTeam Revolver: EP 391 MicroprocessorsIan BryanNoch keine Bewertungen
- CRO Scientech 831Dokument20 SeitenCRO Scientech 831rainydaesNoch keine Bewertungen
- ULLD For Nohmi - Brand - (TN51483e - Rev.0)Dokument33 SeitenULLD For Nohmi - Brand - (TN51483e - Rev.0)vu thien100% (1)
- Experiment E1.07 Differential AmplifierDokument16 SeitenExperiment E1.07 Differential AmplifierMohd FuadNoch keine Bewertungen
- L10 BJT Applications and BiasingDokument23 SeitenL10 BJT Applications and BiasingpojanopeNoch keine Bewertungen
- FluxDokument10 SeitenFluxGigi IosubNoch keine Bewertungen
- LM1894 Dynamic Noise Reduction System DNR: General DescriptionDokument10 SeitenLM1894 Dynamic Noise Reduction System DNR: General DescriptionjdayNoch keine Bewertungen
- SRAC8 UserManual EN20210610Dokument18 SeitenSRAC8 UserManual EN20210610Nadia CondeNoch keine Bewertungen