Das könnte Ihnen auch gefallen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Carrier Malfunctions - EU PDFDokument44 SeitenCarrier Malfunctions - EU PDFrenat100% (1)
- 6200 - 1 Superstructure MalfunctionsDokument82 Seiten6200 - 1 Superstructure Malfunctionsrenat100% (1)
- Re95350 2006-03 PDFDokument12 SeitenRe95350 2006-03 PDFrenatNoch keine Bewertungen
- Re95203 2007-11 PDFDokument20 SeitenRe95203 2007-11 PDFrenatNoch keine Bewertungen
- ред поворот PDFDokument20 Seitenред поворот PDFrenatNoch keine Bewertungen
- Re95200 2007-11Dokument20 SeitenRe95200 2007-11renatNoch keine Bewertungen
- Re95310 2009-01 LLC PDFDokument12 SeitenRe95310 2009-01 LLC PDFrenatNoch keine Bewertungen
- Re95201 2007-11Dokument16 SeitenRe95201 2007-11renatNoch keine Bewertungen
- Re95300 2007-12 PDFDokument16 SeitenRe95300 2007-12 PDFrenatNoch keine Bewertungen
- Adm2 FR Operating Manual 15.07.02Dokument160 SeitenAdm2 FR Operating Manual 15.07.02renat67% (6)
- AGS and GS7 Shift SystemsDokument124 SeitenAGS and GS7 Shift Systemsrenat93% (43)
- CAN Bus LayoutDokument1 SeiteCAN Bus Layoutrenat0% (1)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Brand Positioning of PepsiCoDokument9 SeitenBrand Positioning of PepsiCoAbhishek DhawanNoch keine Bewertungen
- Sweet Biscuits Snack Bars and Fruit Snacks in MexicoDokument17 SeitenSweet Biscuits Snack Bars and Fruit Snacks in MexicoSantiagoNoch keine Bewertungen
- Employees' Pension Scheme, 1995: Form No. 10 C (E.P.S)Dokument4 SeitenEmployees' Pension Scheme, 1995: Form No. 10 C (E.P.S)nasir ahmedNoch keine Bewertungen
- CS321 Computer ArchitectureDokument160 SeitenCS321 Computer ArchitectureAnurag kumarNoch keine Bewertungen
- Embedded Systems DesignDokument576 SeitenEmbedded Systems Designnad_chadi8816100% (4)
- 450i User ManualDokument54 Seiten450i User ManualThượng Lê Văn0% (2)
- RYA-MCA Coastal Skipper-Yachtmaster Offshore Shorebased 2008 AnswersDokument28 SeitenRYA-MCA Coastal Skipper-Yachtmaster Offshore Shorebased 2008 AnswersSerban Sebe100% (4)
- EXTENDED PROJECT-Shoe - SalesDokument28 SeitenEXTENDED PROJECT-Shoe - Salesrhea100% (5)
- Oracle FND User APIsDokument4 SeitenOracle FND User APIsBick KyyNoch keine Bewertungen
- HealthInsuranceCertificate-Group CPGDHAB303500662021Dokument2 SeitenHealthInsuranceCertificate-Group CPGDHAB303500662021Ruban JebaduraiNoch keine Bewertungen
- G.R. No. 185449, November 12, 2014 Del Castillo Digest By: DOLARDokument2 SeitenG.R. No. 185449, November 12, 2014 Del Castillo Digest By: DOLARTheodore DolarNoch keine Bewertungen
- Government of West Bengal Finance (Audit) Department: NABANNA', HOWRAH-711102 No. Dated, The 13 May, 2020Dokument2 SeitenGovernment of West Bengal Finance (Audit) Department: NABANNA', HOWRAH-711102 No. Dated, The 13 May, 2020Satyaki Prasad MaitiNoch keine Bewertungen
- ESG NotesDokument16 SeitenESG Notesdhairya.h22Noch keine Bewertungen
- Low Cost Building ConstructionDokument15 SeitenLow Cost Building ConstructionAtta RehmanNoch keine Bewertungen
- How To Create A Powerful Brand Identity (A Step-by-Step Guide) PDFDokument35 SeitenHow To Create A Powerful Brand Identity (A Step-by-Step Guide) PDFCaroline NobreNoch keine Bewertungen
- Dry Canyon Artillery RangeDokument133 SeitenDry Canyon Artillery RangeCAP History LibraryNoch keine Bewertungen
- 18PGHR11 - MDI - Aditya JainDokument4 Seiten18PGHR11 - MDI - Aditya JainSamanway BhowmikNoch keine Bewertungen
- Avalon LF GB CTP MachineDokument2 SeitenAvalon LF GB CTP Machinekojo0% (1)
- State Immunity Cases With Case DigestsDokument37 SeitenState Immunity Cases With Case DigestsStephanie Dawn Sibi Gok-ong100% (4)
- Presentation Report On Customer Relationship Management On SubwayDokument16 SeitenPresentation Report On Customer Relationship Management On SubwayVikrant KumarNoch keine Bewertungen
- How To Control A DC Motor With An ArduinoDokument7 SeitenHow To Control A DC Motor With An Arduinothatchaphan norkhamNoch keine Bewertungen
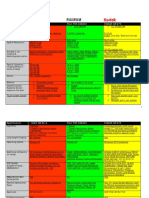
- Agfa CR 85-X: Specification Fuji FCR Xg5000 Kodak CR 975Dokument3 SeitenAgfa CR 85-X: Specification Fuji FCR Xg5000 Kodak CR 975Youness Ben TibariNoch keine Bewertungen
- HRD DilemmaDokument4 SeitenHRD DilemmaAjay KumarNoch keine Bewertungen
- PLT Lecture NotesDokument5 SeitenPLT Lecture NotesRamzi AbdochNoch keine Bewertungen
- ST JohnDokument20 SeitenST JohnNa PeaceNoch keine Bewertungen
- Business Environment Analysis - Saudi ArabiaDokument24 SeitenBusiness Environment Analysis - Saudi ArabiaAmlan JenaNoch keine Bewertungen
- Dike Calculation Sheet eDokument2 SeitenDike Calculation Sheet eSaravanan Ganesan100% (1)
- TSB 120Dokument7 SeitenTSB 120patelpiyushbNoch keine Bewertungen
- Discover Mecosta 2011Dokument40 SeitenDiscover Mecosta 2011Pioneer GroupNoch keine Bewertungen
- DesalinationDokument4 SeitenDesalinationsivasu1980aNoch keine Bewertungen