Das könnte Ihnen auch gefallen
- Planificacion Primer Bimestre Fisica, Ciencias Sociales y Quimica BachillerDokument9 SeitenPlanificacion Primer Bimestre Fisica, Ciencias Sociales y Quimica BachillerManuelNoch keine Bewertungen
- Código AsciiDokument4 SeitenCódigo AsciiEli dos Anjos RodriguesNoch keine Bewertungen
- Plantilla - AlgoritmiaDokument9 SeitenPlantilla - Algoritmiaroberto.martinez8198Noch keine Bewertungen
- Como Copiar Un Archivo PDF A Un CD PDFDokument2 SeitenComo Copiar Un Archivo PDF A Un CD PDFDanielleNoch keine Bewertungen
- Ayuda 8 - Idef Definicion IntegradaDokument23 SeitenAyuda 8 - Idef Definicion IntegradairsekNoch keine Bewertungen
- Manual de MoodleDokument276 SeitenManual de MoodleLizander Hurtado MartínezNoch keine Bewertungen
- Práctica 9. Instalación y Configuración de Un S.O. en VMWareDokument2 SeitenPráctica 9. Instalación y Configuración de Un S.O. en VMWareE&GNoch keine Bewertungen
- 17-Formulario TIE FEB19Dokument4 Seiten17-Formulario TIE FEB19roxanairimieaNoch keine Bewertungen
- Construyendo Data Lake AWSDokument10 SeitenConstruyendo Data Lake AWSpedro_luna_43Noch keine Bewertungen
- Asimov, Isaac - Fundacion 1 - Preludio A La Fundacion (1988)Dokument205 SeitenAsimov, Isaac - Fundacion 1 - Preludio A La Fundacion (1988)pedrolmo100% (4)
- 3.2 Normas de Etiqueta en InternetDokument3 Seiten3.2 Normas de Etiqueta en InternetAngélica GómezNoch keine Bewertungen
- Utn Frba Consignas Word AvanzadoDokument8 SeitenUtn Frba Consignas Word AvanzadoInnovatek LegoNoch keine Bewertungen
- Mejoramiento de La ProductividadDokument46 SeitenMejoramiento de La ProductividadKarla EspinozaNoch keine Bewertungen
- Clase 3 - Eleccion de Componentes Del PC de ReemplazoDokument17 SeitenClase 3 - Eleccion de Componentes Del PC de Reemplazotromito2503Noch keine Bewertungen
- Pestaña de RevisarDokument3 SeitenPestaña de RevisarAntonio Maria de Garcia Sanchez JimenezNoch keine Bewertungen
- Modelo de Factura de Proveedor InformalDokument1 SeiteModelo de Factura de Proveedor InformalManuel AbreuNoch keine Bewertungen
- Manual de Lingo CompactoDokument25 SeitenManual de Lingo CompactoArmandoMontoyaNoch keine Bewertungen
- Ejemplo en El Codigo en Pic BasicDokument5 SeitenEjemplo en El Codigo en Pic BasicLorena RiveroNoch keine Bewertungen
- Diseño Mapas Conceptuales en ComputadoraDokument63 SeitenDiseño Mapas Conceptuales en ComputadoraGuillermo Gracias67% (3)
- 60Dokument26 Seiten60Santos DavidNoch keine Bewertungen
- فەرهەنگی واتاناسیDokument17 Seitenفەرهەنگی واتاناسیhuseyinNoch keine Bewertungen
- Especificacion de Requerimientos de SoftDokument18 SeitenEspecificacion de Requerimientos de SoftPachon0812Noch keine Bewertungen
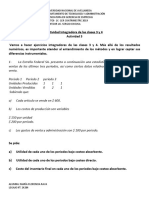
- Actividad Integradora de Las Clases 3 y 4Dokument3 SeitenActividad Integradora de Las Clases 3 y 4María Florencia Rava33% (3)
- Cómo Activar El Dictado Por Voz de Google en PC o MacDokument17 SeitenCómo Activar El Dictado Por Voz de Google en PC o MacSamuelson GuillNoch keine Bewertungen
- Software de Programación de RobotsDokument8 SeitenSoftware de Programación de RobotsJhonny Bolaños ZuñigaNoch keine Bewertungen
- LPIC 1 Guia RapidaDokument4 SeitenLPIC 1 Guia Rapida20180322Noch keine Bewertungen
- 3 Conceptos Básicos de La ComputadoraDokument6 Seiten3 Conceptos Básicos de La ComputadoraEdna Paola Chavez GuerraNoch keine Bewertungen
- Cognitivismo Constructuvismo y Conductismo y La IADokument7 SeitenCognitivismo Constructuvismo y Conductismo y La IAMariela BuenoNoch keine Bewertungen
- Ctualiza Tu Huawei P9 Lite A Emui 5 OficialDokument22 SeitenCtualiza Tu Huawei P9 Lite A Emui 5 OficialJean Carlos Alvarado YucraNoch keine Bewertungen
- Capacidades y Contenidos Computacion para Primaria Por UnidadesDokument10 SeitenCapacidades y Contenidos Computacion para Primaria Por UnidadesYE Ccosi0% (1)