Das könnte Ihnen auch gefallen
- The Effect of Ethical Leadership and OrganizationaDokument7 SeitenThe Effect of Ethical Leadership and OrganizationaPhan Thành TrungNoch keine Bewertungen
- Acoustic - Dau Mua PDFDokument4 SeitenAcoustic - Dau Mua PDFPhan Thành TrungNoch keine Bewertungen
- Fundamentals of Academic Writing Level 1 PDFDokument236 SeitenFundamentals of Academic Writing Level 1 PDFQUỲNH ĐẶNG79% (19)
- Case StudyDokument455 SeitenCase StudyGalih Kusumah80% (10)
- W - Sway PDFDokument2 SeitenW - Sway PDFPhan Thành Trung100% (2)
- Private International Air Law: Faculty of Law - Mcgill UniversityDokument5 SeitenPrivate International Air Law: Faculty of Law - Mcgill UniversityPhan Thành TrungNoch keine Bewertungen
- 1 e Freight Fundamentals 130226120550 Phpapp01 PDFDokument25 Seiten1 e Freight Fundamentals 130226120550 Phpapp01 PDFprathamesh kaduNoch keine Bewertungen
- 2203286-You Are My EverythingDokument5 Seiten2203286-You Are My EverythingPhan Thành TrungNoch keine Bewertungen
- Journal of Transport Geography: Jingyi LinDokument9 SeitenJournal of Transport Geography: Jingyi LinPhan Thành TrungNoch keine Bewertungen
- Journal of Transport Geography Volume 22 Issue None 2012 (Doi 10.1016 - J.jtrangeo.2011.12.002) Jingyi Lin - Network Analysis of Chinaâ ™s Aviation System, Statistical and Spatial StructureDokument12 SeitenJournal of Transport Geography Volume 22 Issue None 2012 (Doi 10.1016 - J.jtrangeo.2011.12.002) Jingyi Lin - Network Analysis of Chinaâ ™s Aviation System, Statistical and Spatial StructurePhan Thành TrungNoch keine Bewertungen
- (29-12-2015 15.06.00) Lich Thi hk1 2015 2016Dokument146 Seiten(29-12-2015 15.06.00) Lich Thi hk1 2015 2016Phan Thành TrungNoch keine Bewertungen
- The Objectives of The Course Include As FollowsDokument4 SeitenThe Objectives of The Course Include As FollowsPhan Thành TrungNoch keine Bewertungen
- 1302 7017 PDFDokument28 Seiten1302 7017 PDFPhan Thành TrungNoch keine Bewertungen
- Reynolds-Feighan and Vega: Structural Centrality Relations in The Global Air Transport SystemDokument9 SeitenReynolds-Feighan and Vega: Structural Centrality Relations in The Global Air Transport SystemPhan Thành TrungNoch keine Bewertungen
- Transportation Research Part D: Milan JanicDokument13 SeitenTransportation Research Part D: Milan JanicPhan Thành TrungNoch keine Bewertungen
- System For Assessing Aviation's Global Emissions (SAGE), Part 1: Model Description and Inventory ResultsDokument22 SeitenSystem For Assessing Aviation's Global Emissions (SAGE), Part 1: Model Description and Inventory ResultsPhan Thành TrungNoch keine Bewertungen
- Transportation Research Part A - General Volume 19 Issue 1 1985 (Doi 10.1016 - 0191-2607 (85) 90009-3) Gordon J. Fielding Timlynn T. Babitsky Mary E. Brenner - Performance Evaluation For Bus Trans PDFDokument10 SeitenTransportation Research Part A - General Volume 19 Issue 1 1985 (Doi 10.1016 - 0191-2607 (85) 90009-3) Gordon J. Fielding Timlynn T. Babitsky Mary E. Brenner - Performance Evaluation For Bus Trans PDFPhan Thành TrungNoch keine Bewertungen
- Analysis of The Airport Network of India As A Complex Weighted Network Ganesh BaglerDokument9 SeitenAnalysis of The Airport Network of India As A Complex Weighted Network Ganesh BaglergansbagsNoch keine Bewertungen
- Journal of Air Transport Management Volume 28 Issue 2013 (Doi 10.1016 - J.jairtraman.2012.12.010) Daft, Jost Albers, Sascha - A Conceptual Framework For Measuring Airline Business Model ConvergeDokument12 SeitenJournal of Air Transport Management Volume 28 Issue 2013 (Doi 10.1016 - J.jairtraman.2012.12.010) Daft, Jost Albers, Sascha - A Conceptual Framework For Measuring Airline Business Model ConvergePhan Thành TrungNoch keine Bewertungen
- Management Emphasis and Performance in The Airline Industry: An Exploratory Multilevel AnalysisDokument21 SeitenManagement Emphasis and Performance in The Airline Industry: An Exploratory Multilevel AnalysisPhan Thành TrungNoch keine Bewertungen
- Transport Policy: Wei Min Liu, Maria K.R. LukDokument9 SeitenTransport Policy: Wei Min Liu, Maria K.R. LukPhan Thành TrungNoch keine Bewertungen
- Measuring Airportsõ Operating E Ciency: A Summary of The 2003 Atrs Global Airport Benchmarking ReportDokument18 SeitenMeasuring Airportsõ Operating E Ciency: A Summary of The 2003 Atrs Global Airport Benchmarking ReportPhan Thành TrungNoch keine Bewertungen
- Modelling Operational, Economic and Environmental Performance of An Air Transport NetworkDokument18 SeitenModelling Operational, Economic and Environmental Performance of An Air Transport NetworkPhan Thành TrungNoch keine Bewertungen
- Aviation and Externalities: The Accomplishments and ProblemsDokument22 SeitenAviation and Externalities: The Accomplishments and ProblemsPhan Thành TrungNoch keine Bewertungen
- Journal of Air Transport Management Volume 4 Issue 3 1998 (Doi 10.1016 - s0969-6997 (98) 00015-5) Anming Zhang - Industrial Reform and Air Transport Development in ChinaDokument20 SeitenJournal of Air Transport Management Volume 4 Issue 3 1998 (Doi 10.1016 - s0969-6997 (98) 00015-5) Anming Zhang - Industrial Reform and Air Transport Development in ChinaPhan Thành TrungNoch keine Bewertungen
- E Ciency and Performance Measurement in The Air Transportation IndustryDokument4 SeitenE Ciency and Performance Measurement in The Air Transportation IndustryPhan Thành TrungNoch keine Bewertungen
- Journal of Transport Geography: Jiaoe Wang, Huihui Mo, Fahui WangDokument14 SeitenJournal of Transport Geography: Jiaoe Wang, Huihui Mo, Fahui WangPhan Thành TrungNoch keine Bewertungen
- Sustainable Public Transport Systems: Moving Towards A Value For Money and Network-Based Approach and Away From Blind CommitmentDokument5 SeitenSustainable Public Transport Systems: Moving Towards A Value For Money and Network-Based Approach and Away From Blind CommitmentPhan Thành TrungNoch keine Bewertungen
- Journal of Transport Geography: Jingyi LinDokument9 SeitenJournal of Transport Geography: Jingyi LinPhan Thành TrungNoch keine Bewertungen
- Journal of Transport Geography: Megan S. Ryerson, Xin GeDokument12 SeitenJournal of Transport Geography: Megan S. Ryerson, Xin GePhan Thành TrungNoch keine Bewertungen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Government of India Ministry of FinanceDokument7 SeitenGovernment of India Ministry of FinanceJAYKISHAN VIDHWANINoch keine Bewertungen
- Mechanical Seminar Topics ListDokument21 SeitenMechanical Seminar Topics Listnewlen210% (1)
- Form 47 (See Rules 83 (2) and 87 (2) ) Authorisation For Tourist Permit or National PermitDokument2 SeitenForm 47 (See Rules 83 (2) and 87 (2) ) Authorisation For Tourist Permit or National PermitSomnath DanNoch keine Bewertungen
- Automotive Axles LTDDokument25 SeitenAutomotive Axles LTDLK CoolgirlNoch keine Bewertungen
- Draft Ansi z26 11Dokument32 SeitenDraft Ansi z26 11Nilesh MahajanNoch keine Bewertungen
- Approved List of Standards 30th March 2017Dokument13 SeitenApproved List of Standards 30th March 2017adammzjinNoch keine Bewertungen
- Protecting Parking Garages - NFPADokument7 SeitenProtecting Parking Garages - NFPAJohn KupchaNoch keine Bewertungen
- gs450h Lexus Emergency Guide PDFDokument29 Seitengs450h Lexus Emergency Guide PDFlukasz_b7100% (1)
- Fabrication Site Construction Safety Recommended Practice - Hazardous ActivitiesDokument44 SeitenFabrication Site Construction Safety Recommended Practice - Hazardous ActivitiesnessieanatashaNoch keine Bewertungen
- Persuasive Essay Example For Grade 8Dokument3 SeitenPersuasive Essay Example For Grade 8Umer KhanNoch keine Bewertungen
- Cat Forklift Gp25 Service Operation Maintenance Manual 2Dokument24 SeitenCat Forklift Gp25 Service Operation Maintenance Manual 2poce1991100% (18)
- Gccv-Public Carriers Other Than Three Wheelers Package Policy - Zone C Motor Insurance Certificate Cum Policy ScheduleDokument51 SeitenGccv-Public Carriers Other Than Three Wheelers Package Policy - Zone C Motor Insurance Certificate Cum Policy Schedulejpeg143Noch keine Bewertungen
- Section LK Seating and Occupant Protection: National Code of Practice For Light Vehicle Construction and ModificationDokument76 SeitenSection LK Seating and Occupant Protection: National Code of Practice For Light Vehicle Construction and ModificationkhilanvekariaNoch keine Bewertungen
- Autoplan Policies ICBCDokument52 SeitenAutoplan Policies ICBCnbirakNoch keine Bewertungen
- MR1 Instructions 20201102 (1) FINAL - DFC0811908Dokument4 SeitenMR1 Instructions 20201102 (1) FINAL - DFC0811908kiowacNoch keine Bewertungen
- Maintenance Manual Ottawa 4x2, 6x4Dokument172 SeitenMaintenance Manual Ottawa 4x2, 6x4mliugong100% (4)
- Naval Combat - Pathfinder 2e - GM BinderDokument26 SeitenNaval Combat - Pathfinder 2e - GM BinderRodrigo Moraes100% (1)
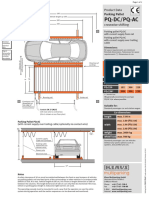
- Pq-Dc/Pq-Ac: Parking PalletDokument5 SeitenPq-Dc/Pq-Ac: Parking PalletRafael SalgadoNoch keine Bewertungen
- Blast Monitoring ReportDokument19 SeitenBlast Monitoring Reportsehrishb01Noch keine Bewertungen
- Traffic Growth Rate EstimationDokument6 SeitenTraffic Growth Rate Estimationmanu1357Noch keine Bewertungen
- Yale Reach Truck TVRS-569Dokument6 SeitenYale Reach Truck TVRS-569Aaron PerezNoch keine Bewertungen
- Hyundai 5 Year Warranty Terms and ConditionsDokument2 SeitenHyundai 5 Year Warranty Terms and ConditionsMateosNoch keine Bewertungen
- Fire in VehiclesDokument328 SeitenFire in Vehiclesgurkan arif yalcinkayaNoch keine Bewertungen
- Users Manual PDFDokument52 SeitenUsers Manual PDFaeroromeosNoch keine Bewertungen
- Advanced Transport SystemsDokument421 SeitenAdvanced Transport Systemsyas100% (1)
- Polaris Phoenix 2005 99 RangerDokument104 SeitenPolaris Phoenix 2005 99 RangersebastianNoch keine Bewertungen
- Principles of Mine Haul Road Design and ConstructionDokument133 SeitenPrinciples of Mine Haul Road Design and ConstructionRoger Thompson100% (1)
- Pancos Oil Dispenser ManualDokument30 SeitenPancos Oil Dispenser ManualThiha SawNoch keine Bewertungen
- Carrier Manual V1.0Dokument37 SeitenCarrier Manual V1.0joyce.europeanNoch keine Bewertungen