Das könnte Ihnen auch gefallen
- Railroad Signal Specialist: Passbooks Study GuideVon EverandRailroad Signal Specialist: Passbooks Study GuideNoch keine Bewertungen
- CBTC (Communication Based Train Control) : System and DevelopmentDokument8 SeitenCBTC (Communication Based Train Control) : System and DevelopmentsankardevNoch keine Bewertungen
- International Standards For Train CommunicationDokument5 SeitenInternational Standards For Train Communicationfelipeo83Noch keine Bewertungen
- CBTCDokument5 SeitenCBTCyadvikram7Noch keine Bewertungen
- My DocDokument18 SeitenMy DocJOY PhilipNoch keine Bewertungen
- Summer Training DMRC ReportDokument34 SeitenSummer Training DMRC ReportTeresa Carter100% (1)
- CBTC Global PDFDokument8 SeitenCBTC Global PDFrajimuruganNoch keine Bewertungen
- Frauscher Whitepaper APR 23Dokument9 SeitenFrauscher Whitepaper APR 23Tamer TaskinNoch keine Bewertungen
- IRSE 15 Feb 11 SeminarDokument207 SeitenIRSE 15 Feb 11 SeminarRezaNoch keine Bewertungen
- CSW - Railway - White Paper - ERTMS and CBTC Side by SideDokument4 SeitenCSW - Railway - White Paper - ERTMS and CBTC Side by Sidejosemusic23Noch keine Bewertungen
- Product & Project Catalogue: Providing Total Solution For Railway ProjectsDokument24 SeitenProduct & Project Catalogue: Providing Total Solution For Railway ProjectsrustandiNoch keine Bewertungen
- Track Circuits - AlstomDokument16 SeitenTrack Circuits - AlstompaulaNoch keine Bewertungen
- 7 Key CBTC Functions Rev 02Dokument76 Seiten7 Key CBTC Functions Rev 02Wasif SaeedNoch keine Bewertungen
- Catalog UFSBIDokument3 SeitenCatalog UFSBINilangshu DasNoch keine Bewertungen
- Narasumber - Signaling System of High Speed Railway (Achmad Sugiana - 16 Sept 2021)Dokument63 SeitenNarasumber - Signaling System of High Speed Railway (Achmad Sugiana - 16 Sept 2021)Arief DarmawanNoch keine Bewertungen
- Signalling SysmemDokument15 SeitenSignalling SysmemRuslan KuzhekovNoch keine Bewertungen
- Signalling & Train Control Solution For MML4: Project: Mumbai Metro Rail Project Line 4Dokument29 SeitenSignalling & Train Control Solution For MML4: Project: Mumbai Metro Rail Project Line 4MANISH KUMAR100% (1)
- Introductory Handbook On CBTCDokument88 SeitenIntroductory Handbook On CBTCBibek SinghNoch keine Bewertungen
- Seltrac CBTC ReferencesDokument3 SeitenSeltrac CBTC ReferencesKostyaBadmintonistNoch keine Bewertungen
- Moving Block SignalDokument6 SeitenMoving Block SignalErlyn AlagonNoch keine Bewertungen
- Test Specification For Eurobalise FFFIS-subset-085 PDFDokument341 SeitenTest Specification For Eurobalise FFFIS-subset-085 PDFMickNoch keine Bewertungen
- Benefits and Barriers To CBTC and ETCS ConvergenceDokument20 SeitenBenefits and Barriers To CBTC and ETCS ConvergencepoketupiNoch keine Bewertungen
- Operation Lansdowne Special Report December 2017Dokument151 SeitenOperation Lansdowne Special Report December 2017EmmaNoch keine Bewertungen
- ATS - Presentation - V4Dokument52 SeitenATS - Presentation - V4WiilDiazNoch keine Bewertungen
- ATP Intro - Slides 1.5releasedDokument99 SeitenATP Intro - Slides 1.5releasedgmarian32967% (3)
- CBTC Test Simulation BenchDokument11 SeitenCBTC Test Simulation BenchMircea AlexoaiaNoch keine Bewertungen
- Communication Based Train Control SystemDokument25 SeitenCommunication Based Train Control SystemArthiNoch keine Bewertungen
- IRSE CBTC Conference - 2016 Toronto - Shantilal Morar - Thales Re-Signalling With The CBTC Signalling System - Rev01 PDFDokument34 SeitenIRSE CBTC Conference - 2016 Toronto - Shantilal Morar - Thales Re-Signalling With The CBTC Signalling System - Rev01 PDFRizki Fajar NovantoNoch keine Bewertungen
- VRIOGS 012.6.14 Rev A 7 - 1.70mm 2 Core Copper CableDokument12 SeitenVRIOGS 012.6.14 Rev A 7 - 1.70mm 2 Core Copper CableCr WongNoch keine Bewertungen
- Microprocessors in Railway SignalingDokument9 SeitenMicroprocessors in Railway SignalingNECDET ÇİLİNGİRNoch keine Bewertungen
- Sg0602002 Typical Signalling & Control Systems CircuitsDokument171 SeitenSg0602002 Typical Signalling & Control Systems CircuitsJeremy Rifkin100% (1)
- Sist en 50129 2019Dokument15 SeitenSist en 50129 2019ahmed.hossamelden91Noch keine Bewertungen
- A Safety Instrumented System For Rolling Stocks-Methodology, Design Process and Safety AnalysisDokument13 SeitenA Safety Instrumented System For Rolling Stocks-Methodology, Design Process and Safety AnalysispoketupiNoch keine Bewertungen
- 6 1 Metrorail 3kVDCEMUTechnicalSpecificationsDokument72 Seiten6 1 Metrorail 3kVDCEMUTechnicalSpecificationsmkashkooli_scribdNoch keine Bewertungen
- Railway Systems Engineering and Integration Masters-MSc-Diploma-CertificateDokument4 SeitenRailway Systems Engineering and Integration Masters-MSc-Diploma-CertificateJoselito SoaresNoch keine Bewertungen
- CBTC PDFDokument10 SeitenCBTC PDFمحمد الجرواني0% (1)
- Line CapacityDokument14 SeitenLine CapacityYogesh Raj Badalia100% (1)
- Critical Embedded System For Railways TransportDokument82 SeitenCritical Embedded System For Railways TransportDaniNoch keine Bewertungen
- ERMTS Onboard EquipmentDokument15 SeitenERMTS Onboard EquipmentangnavaNoch keine Bewertungen
- ERTMSDokument8 SeitenERTMSAnjali DSuzaNoch keine Bewertungen
- Trainguard MTDokument12 SeitenTrainguard MTCosmic GarashNoch keine Bewertungen
- Ertms EtcsDokument32 SeitenErtms EtcsAbdulhmeed MutalatNoch keine Bewertungen
- Diary of Important Signalling Parameters and Safety in RailwaysDokument434 SeitenDiary of Important Signalling Parameters and Safety in Railwayssignalcontrolspj100% (1)
- Grade of AutomationDokument36 SeitenGrade of AutomationAmir ZulfiNoch keine Bewertungen
- Electronics ReportDokument43 SeitenElectronics ReportRajat SinghNoch keine Bewertungen
- Indonesia Track Standard Part 2 PDFDokument95 SeitenIndonesia Track Standard Part 2 PDFIrham M AFNoch keine Bewertungen
- CBTC Radios PDFDokument6 SeitenCBTC Radios PDFrobievNoch keine Bewertungen
- CBTC-Communication Based Train Control - ThylesDokument18 SeitenCBTC-Communication Based Train Control - Thyleser.ras.ma100% (1)
- L1 Che STD 010Dokument27 SeitenL1 Che STD 010MichaelNoch keine Bewertungen
- ERTMS Education Day Part 3 InfrastructureDokument24 SeitenERTMS Education Day Part 3 InfrastructureAdiKalemNoch keine Bewertungen
- Bombardier CityfloDokument14 SeitenBombardier CityfloBiju KmNoch keine Bewertungen
- CDC-Booklet On S&TDokument136 SeitenCDC-Booklet On S&TAbhijitNoch keine Bewertungen
- Paparan Kegiatan Alih Teknologi Pengujian Kereta ApiDokument9 SeitenPaparan Kegiatan Alih Teknologi Pengujian Kereta ApiMuhammad Didit PrasodjoNoch keine Bewertungen
- Railway Intelligent Transportation System Architecture and Implementation Viliam LENDEL Michal VARMUS1Dokument14 SeitenRailway Intelligent Transportation System Architecture and Implementation Viliam LENDEL Michal VARMUS1AdiKalem0% (1)
- 7 - RB Etcs AcademyDokument25 Seiten7 - RB Etcs Academyhay902100% (1)
- 1.2 IRSE Conv 2013 Swedish Rail - Per OlofssonDokument35 Seiten1.2 IRSE Conv 2013 Swedish Rail - Per OlofssonShashi Bhusan SinghNoch keine Bewertungen
- 11 CES Railway-Control-SystemsDokument70 Seiten11 CES Railway-Control-SystemskvreddyNoch keine Bewertungen
- Centralized Traffic Control (CTC) Is A Form ofDokument7 SeitenCentralized Traffic Control (CTC) Is A Form ofAmitJollyNoch keine Bewertungen
- 2004 Domino Type Control PanelDokument18 Seiten2004 Domino Type Control PanelAmit KhandwalNoch keine Bewertungen
- 7614 PDFDokument236 Seiten7614 PDFAmit KhandwalNoch keine Bewertungen
- Bangalore Metro Signalling System (Alstom)Dokument25 SeitenBangalore Metro Signalling System (Alstom)shrijit_ece100% (13)
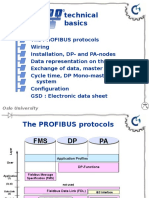
- Basics of Profibus Operation Chapter1Dokument19 SeitenBasics of Profibus Operation Chapter1Amit KhandwalNoch keine Bewertungen
- Smartway SCA3 Axle Counter - Product Sheet - English - 20160302Dokument2 SeitenSmartway SCA3 Axle Counter - Product Sheet - English - 20160302Amit KhandwalNoch keine Bewertungen
- Safety Leadership TTMIBDokument34 SeitenSafety Leadership TTMIBricho naiborhuNoch keine Bewertungen
- HACCP Ph2 Modules Description DraftDokument11 SeitenHACCP Ph2 Modules Description DraftAlmuhajir No WhereNoch keine Bewertungen
- 3M Datasheet HEAD HC43 BWoodsDokument3 Seiten3M Datasheet HEAD HC43 BWoodsMustafaNoch keine Bewertungen
- SDS Sodium Molybdate SolutionDokument5 SeitenSDS Sodium Molybdate SolutionYen NguyenNoch keine Bewertungen
- Grinding - SiemensDokument422 SeitenGrinding - SiemensMadhuNoch keine Bewertungen
- Safety PledgeDokument68 SeitenSafety PledgeRohit TharseNoch keine Bewertungen
- SMP Organization Profile Document New 1.12.2012Dokument26 SeitenSMP Organization Profile Document New 1.12.2012k_981966368Noch keine Bewertungen
- Seguridad en Reactores de Investigación PDFDokument152 SeitenSeguridad en Reactores de Investigación PDFJorge PáezNoch keine Bewertungen
- Register of Chemicals Hazardous To Health Section A: Company InformationDokument3 SeitenRegister of Chemicals Hazardous To Health Section A: Company InformationRomuald Leo PiongNoch keine Bewertungen
- Ropes Course ManualDokument68 SeitenRopes Course ManualShaun 'Graven Fist' TanNoch keine Bewertungen
- HK Audio LUCAS NANO 302 Manual v1 1Dokument52 SeitenHK Audio LUCAS NANO 302 Manual v1 1Mvtronica Unipessoal ldaNoch keine Bewertungen
- Drilling For Subsurface Investigations - Unexpectedly Encountering Suspected Hazardous MaterialDokument2 SeitenDrilling For Subsurface Investigations - Unexpectedly Encountering Suspected Hazardous MaterialXarmdNoch keine Bewertungen
- 846.1500 Trupol Plug Accelerator (MSDS)Dokument4 Seiten846.1500 Trupol Plug Accelerator (MSDS)U.s. Ezhil ArivudainambiNoch keine Bewertungen
- SCI03 - PPT - CO6 - Philippine DRR LawDokument21 SeitenSCI03 - PPT - CO6 - Philippine DRR LawEdward SnowdenNoch keine Bewertungen
- COSWP Prop. Amendments - Chapter 4 Emergency Drills and Procedures - 1-8-10Dokument3 SeitenCOSWP Prop. Amendments - Chapter 4 Emergency Drills and Procedures - 1-8-10Cip GrecuNoch keine Bewertungen
- 001 - JobcardDokument4 Seiten001 - JobcardLoh Siong FattNoch keine Bewertungen
- Action Listing For Food Safety Audit PrepDokument6 SeitenAction Listing For Food Safety Audit PrepAGARCIANoch keine Bewertungen
- Demolition Method Statement PDFDokument17 SeitenDemolition Method Statement PDFKrish Doodnauth100% (2)
- 153 SDS (GHS) - I-ChemDokument6 Seiten153 SDS (GHS) - I-ChemAmirHakimRusliNoch keine Bewertungen
- ColgateSite Media MSDS Vel Traditional RoseDokument7 SeitenColgateSite Media MSDS Vel Traditional RoseoroxcooNoch keine Bewertungen
- Mr. Julius Perez Gervacio 22222Dokument4 SeitenMr. Julius Perez Gervacio 22222sami gorsiNoch keine Bewertungen
- Kurtyna CEDESDokument48 SeitenKurtyna CEDESLIFT-POLNoch keine Bewertungen
- Useful Tips For A Successful HAZOP Study: Process Hazard Analysis TechniquesDokument10 SeitenUseful Tips For A Successful HAZOP Study: Process Hazard Analysis TechniquesDesiree MolinaNoch keine Bewertungen
- GP1F38TDokument5 SeitenGP1F38TJosé SCOURNEAUNoch keine Bewertungen
- RANBAXY Company ProfileDokument20 SeitenRANBAXY Company ProfilePrince Satish ReddyNoch keine Bewertungen
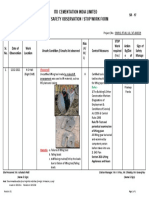
- Itd Cementation India Limited Daily Safety Observation / Stop Work FormDokument1 SeiteItd Cementation India Limited Daily Safety Observation / Stop Work FormBhagat DeepakNoch keine Bewertungen
- Assignment 3Dokument3 SeitenAssignment 3swapnil singhNoch keine Bewertungen
- 169-Article Text-239-1-10-20181008Dokument7 Seiten169-Article Text-239-1-10-20181008Khael DimasNoch keine Bewertungen
- Hazard Identification, Risk Assessment and Risk ControlDokument17 SeitenHazard Identification, Risk Assessment and Risk ControlMarr Allonar SumagangNoch keine Bewertungen
- Marketing PlanDokument11 SeitenMarketing PlanVINAY PHOGATNoch keine Bewertungen
- Electrical Safety Code Manual: A Plain Language Guide to National Electrical Code, OSHA and NFPA 70EVon EverandElectrical Safety Code Manual: A Plain Language Guide to National Electrical Code, OSHA and NFPA 70EBewertung: 3 von 5 Sternen3/5 (6)
- Workbook to Accompany Maintenance & Reliability Best PracticesVon EverandWorkbook to Accompany Maintenance & Reliability Best PracticesBewertung: 3.5 von 5 Sternen3.5/5 (3)
- Practical Industrial Safety, Risk Assessment and Shutdown SystemsVon EverandPractical Industrial Safety, Risk Assessment and Shutdown SystemsBewertung: 4 von 5 Sternen4/5 (11)
- The ISO 45001:2018 Implementation Handbook: Guidance on Building an Occupational Health and Safety Management SystemVon EverandThe ISO 45001:2018 Implementation Handbook: Guidance on Building an Occupational Health and Safety Management SystemNoch keine Bewertungen
- Guidelines for Initiating Events and Independent Protection Layers in Layer of Protection AnalysisVon EverandGuidelines for Initiating Events and Independent Protection Layers in Layer of Protection AnalysisBewertung: 5 von 5 Sternen5/5 (1)
- Redefining Work Health and Safety: Systems, Strategies, and Progressive ApproachesVon EverandRedefining Work Health and Safety: Systems, Strategies, and Progressive ApproachesNoch keine Bewertungen
- A Complete Guide to Safety Officer Interview Questions and AnswersVon EverandA Complete Guide to Safety Officer Interview Questions and AnswersBewertung: 4 von 5 Sternen4/5 (1)
- Functional Safety from Scratch: A Practical Guide to Process Industry ApplicationsVon EverandFunctional Safety from Scratch: A Practical Guide to Process Industry ApplicationsNoch keine Bewertungen
- Rules of Thumb for Maintenance and Reliability EngineersVon EverandRules of Thumb for Maintenance and Reliability EngineersBewertung: 4.5 von 5 Sternen4.5/5 (12)
- Fire Fighting Pumping Systems at Industrial FacilitiesVon EverandFire Fighting Pumping Systems at Industrial FacilitiesBewertung: 4.5 von 5 Sternen4.5/5 (3)
- Healthy Buildings: How Indoor Spaces Drive Performance and ProductivityVon EverandHealthy Buildings: How Indoor Spaces Drive Performance and ProductivityBewertung: 5 von 5 Sternen5/5 (2)
- Fundamentals of Risk Management for Process Industry EngineersVon EverandFundamentals of Risk Management for Process Industry EngineersNoch keine Bewertungen
- Introduction to Petroleum Process SafetyVon EverandIntroduction to Petroleum Process SafetyBewertung: 3 von 5 Sternen3/5 (2)
- Guidelines for Auditing Process Safety Management SystemsVon EverandGuidelines for Auditing Process Safety Management SystemsNoch keine Bewertungen
- What Went Wrong?: Case Histories of Process Plant Disasters and How They Could Have Been AvoidedVon EverandWhat Went Wrong?: Case Histories of Process Plant Disasters and How They Could Have Been AvoidedBewertung: 5 von 5 Sternen5/5 (2)
- Culture, Health and Illness: An Introduction for Health ProfessionalsVon EverandCulture, Health and Illness: An Introduction for Health ProfessionalsNoch keine Bewertungen
- Guidelines for Implementing Process Safety ManagementVon EverandGuidelines for Implementing Process Safety ManagementNoch keine Bewertungen
- Plutopia: Nuclear Families, Atomic Cities, and the Great Soviet and American Plutonium DisastersVon EverandPlutopia: Nuclear Families, Atomic Cities, and the Great Soviet and American Plutonium DisastersBewertung: 4 von 5 Sternen4/5 (32)
- Chemical Process Safety: Learning from Case HistoriesVon EverandChemical Process Safety: Learning from Case HistoriesBewertung: 4 von 5 Sternen4/5 (14)