Das könnte Ihnen auch gefallen
- LAB ContentDokument24 SeitenLAB Contenttrantienson2707Noch keine Bewertungen
- LAB Content - PH1016Dokument24 SeitenLAB Content - PH1016son caoNoch keine Bewertungen
- Manual PHY-103 Laboratory Final IISERDokument72 SeitenManual PHY-103 Laboratory Final IISERGourav DasNoch keine Bewertungen
- Metrology: Nri Institute of TechnologyDokument55 SeitenMetrology: Nri Institute of TechnologyKasijanto JantoNoch keine Bewertungen
- Experiment (2) MeasurementsDokument10 SeitenExperiment (2) MeasurementsAbha NawafNoch keine Bewertungen
- General Physics: Iit-Physics - Set - IDokument12 SeitenGeneral Physics: Iit-Physics - Set - IHemant KumarNoch keine Bewertungen
- Practical Experiments 1 To 7Dokument9 SeitenPractical Experiments 1 To 7Moses Samuel SukdularyNoch keine Bewertungen
- Võ Khôi Thành Sơn - 20202768Dokument53 SeitenVõ Khôi Thành Sơn - 20202768Sơn VõNoch keine Bewertungen
- Measuring The Dimensions of BodiesDokument6 SeitenMeasuring The Dimensions of BodiescoktailpoissonrougeNoch keine Bewertungen
- Object: Experiment 1 MeasurementDokument7 SeitenObject: Experiment 1 MeasurementAnonymous PhtjQvnZzNoch keine Bewertungen
- Errors, Data Analysis and Fine Measurements: Experiment Number 1Dokument7 SeitenErrors, Data Analysis and Fine Measurements: Experiment Number 1Mahmoud SamahinNoch keine Bewertungen
- Errors, Data Analysis and Fine Measurements: Experiment Number 1Dokument7 SeitenErrors, Data Analysis and Fine Measurements: Experiment Number 1Mahmoud SamahinNoch keine Bewertungen
- Physics ExperimentDokument9 SeitenPhysics ExperimentgapuzsawalNoch keine Bewertungen
- Metrology: Nri Institute of TechnologyDokument55 SeitenMetrology: Nri Institute of TechnologySavantNoch keine Bewertungen
- Experiment - I Measurement: Physics For Scientists and EngineersDokument10 SeitenExperiment - I Measurement: Physics For Scientists and EngineersLionel AlrasheedNoch keine Bewertungen
- Experiment 1Dokument5 SeitenExperiment 1ibraheemNoch keine Bewertungen
- Metrology and Measurements Lab Manual: V Semester Mechanical Engineering Rajalakshmi Engineering CollegeDokument30 SeitenMetrology and Measurements Lab Manual: V Semester Mechanical Engineering Rajalakshmi Engineering CollegeSanju JohnNoch keine Bewertungen
- Laboratory Manual PHY121Dokument21 SeitenLaboratory Manual PHY121Sumit KumarNoch keine Bewertungen
- Screw GaugeDokument6 SeitenScrew GaugeFarhana Sabrin0% (1)
- Experimental Guidance 1.1. Measurement of Density 1st WeekDokument12 SeitenExperimental Guidance 1.1. Measurement of Density 1st WeeksadmanNoch keine Bewertungen
- 11 Class Physics Lab NotesDokument16 Seiten11 Class Physics Lab NotesKanika SivakumarNoch keine Bewertungen
- Metrology Lab ManualDokument8 SeitenMetrology Lab ManualNallappan Rajj ANoch keine Bewertungen
- Lab 2 MM322 Final ReportDokument8 SeitenLab 2 MM322 Final ReportJnrNoch keine Bewertungen
- Index: Ex. No Name of The Experiment Page No. Cycle IDokument29 SeitenIndex: Ex. No Name of The Experiment Page No. Cycle Iprakashrs295Noch keine Bewertungen
- Metrology-Lab-Manual 3 Year 1semDokument41 SeitenMetrology-Lab-Manual 3 Year 1semBHARATH Chandra100% (1)
- Abestano PHY052 1 Activity 1 Measurement of LengthDokument10 SeitenAbestano PHY052 1 Activity 1 Measurement of LengthLOREN MAE BULAYBULAYNoch keine Bewertungen
- Course 1 Laboratory: Second Semester Experiment: The Shear Modulus of SteelDokument7 SeitenCourse 1 Laboratory: Second Semester Experiment: The Shear Modulus of SteelFaiq AhmadNoch keine Bewertungen
- PHYS 1401 General Physics I Experiment 1 Measurement and Units I. ObjectiveDokument5 SeitenPHYS 1401 General Physics I Experiment 1 Measurement and Units I. Objectivejaymart villartaNoch keine Bewertungen
- Least CountDokument8 SeitenLeast CountPutri Citra DewiNoch keine Bewertungen
- Measuring DevicesDokument8 SeitenMeasuring DevicesAisha GonzalesNoch keine Bewertungen
- Metrology and Surface Engineering Lab Manual: 3 Year B.Tech I-Semester Mechanical EngineeringDokument22 SeitenMetrology and Surface Engineering Lab Manual: 3 Year B.Tech I-Semester Mechanical EngineeringKptt LogeswaranNoch keine Bewertungen
- Metrology Lab ManualDokument35 SeitenMetrology Lab ManualNo NameNoch keine Bewertungen
- Class Xi - Practicals 2024Dokument24 SeitenClass Xi - Practicals 2024pillisathwik2Noch keine Bewertungen
- ME2308 Lab ManualDokument28 SeitenME2308 Lab Manualvenkateshyadav2116Noch keine Bewertungen
- Physics Lab 1Dokument16 SeitenPhysics Lab 1Bassel RezkallaNoch keine Bewertungen
- Ensc 102L Lab ExperimentsDokument19 SeitenEnsc 102L Lab ExperimentsgapuzsawalNoch keine Bewertungen
- Principles of Physics I (PHY111) Lab Experiment No: 1Dokument21 SeitenPrinciples of Physics I (PHY111) Lab Experiment No: 1JU KomolNoch keine Bewertungen
- List of EquipmentsDokument18 SeitenList of EquipmentsDivy PathakNoch keine Bewertungen
- 21 Me 435,435,435,435Dokument40 Seiten21 Me 435,435,435,435Faisal MehrbanNoch keine Bewertungen
- Class 11 ExperimentsDokument25 SeitenClass 11 ExperimentsSoham Nag100% (1)
- BASIC PHYSICS G-2 Practical Manual FinalDokument27 SeitenBASIC PHYSICS G-2 Practical Manual FinalPriya SharmaNoch keine Bewertungen
- Experiment 1 - Measurement of Length, Mass and TimeDokument11 SeitenExperiment 1 - Measurement of Length, Mass and TimeKAPEMBWA MAPALO100% (1)
- Measurements and Error AnalysisDokument6 SeitenMeasurements and Error AnalysisJoice Krystel RañoaNoch keine Bewertungen
- Measuring D3vic2sDokument8 SeitenMeasuring D3vic2sHannah Michaela Foronda ReyesNoch keine Bewertungen
- Experiment Measurement of Lengths, Heights, Diameters, Vernier CaliperDokument11 SeitenExperiment Measurement of Lengths, Heights, Diameters, Vernier Caliperv sharvan kumar asst.prof(mech)Noch keine Bewertungen
- Technological University of The Philippines College of Engineering Mechanical Engineering DepartmentDokument13 SeitenTechnological University of The Philippines College of Engineering Mechanical Engineering DepartmentJeshua LloreraNoch keine Bewertungen
- Physical ExperimentDokument21 SeitenPhysical ExperimentAn LêNoch keine Bewertungen
- Dcep 112 & Dmep 112Dokument21 SeitenDcep 112 & Dmep 112aneeqNoch keine Bewertungen
- Measure and Error Analysis Lab 1Dokument7 SeitenMeasure and Error Analysis Lab 1RexRuNoch keine Bewertungen
- Ex 2metrologyDokument6 SeitenEx 2metrologyPiyush ChaulaNoch keine Bewertungen
- MME-ME2308 EMM Lab ManualDokument29 SeitenMME-ME2308 EMM Lab ManualRakesh Kumar100% (1)
- 1 ENSC 102L - Module-I (Activity 1-LA#1)Dokument9 Seiten1 ENSC 102L - Module-I (Activity 1-LA#1)Ciane PattyNoch keine Bewertungen
- IPE 382 - Lab SheetDokument26 SeitenIPE 382 - Lab SheetSAnNoch keine Bewertungen
- MLR Institute of Technology - Lab Manual Engineering MetrologyDokument25 SeitenMLR Institute of Technology - Lab Manual Engineering MetrologyVallik TadNoch keine Bewertungen
- IPE - 302 Sessional SheetDokument22 SeitenIPE - 302 Sessional SheetzahirrayhanNoch keine Bewertungen
- Ace Ahead .Physics Vol 1. Student. Practical GuideDokument18 SeitenAce Ahead .Physics Vol 1. Student. Practical GuideKee N. KeeNoch keine Bewertungen
- Handbook of Mechanical and Materials EngineeringVon EverandHandbook of Mechanical and Materials EngineeringBewertung: 5 von 5 Sternen5/5 (4)
- System Sensor Eps 1201 Data SheetDokument2 SeitenSystem Sensor Eps 1201 Data SheetJMAC SupplyNoch keine Bewertungen
- 2p36907 SwivelDokument42 Seiten2p36907 SwivelIFI ARGENTINA S.A.Noch keine Bewertungen
- Mindman MVSC-300 Solenoid ValveDokument3 SeitenMindman MVSC-300 Solenoid ValvecoronaqcNoch keine Bewertungen
- Timken Tapered Roller Bearings CatalogDokument1 SeiteTimken Tapered Roller Bearings CatalogFakhar FirdausNoch keine Bewertungen
- Extensive Applications of PM Gears: FocusDokument4 SeitenExtensive Applications of PM Gears: FocusAAAHNoch keine Bewertungen
- TacheuchiTB1140 S51400007 - ServiceDokument652 SeitenTacheuchiTB1140 S51400007 - ServiceStelian CrisanNoch keine Bewertungen
- Finite Element Anlysis of HookDokument28 SeitenFinite Element Anlysis of HookHabtamu GeremewNoch keine Bewertungen
- Numerical Simulation of Inflow Performance For Perforated Horizontal WellsDokument7 SeitenNumerical Simulation of Inflow Performance For Perforated Horizontal Wellssaholans2000Noch keine Bewertungen
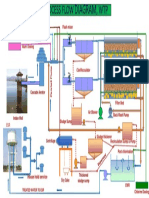
- WTP Process DiagramDokument1 SeiteWTP Process DiagramKumar AbhishekNoch keine Bewertungen
- Slapdriver Interference Screwdriver SystemDokument8 SeitenSlapdriver Interference Screwdriver SystemFreddy Churata SuriNoch keine Bewertungen
- Enthalpy - Thermodynamics Questions and Answers - SanfoundryDokument8 SeitenEnthalpy - Thermodynamics Questions and Answers - SanfoundryBhardwaj Rajinder SippyNoch keine Bewertungen
- Format WPQDokument2 SeitenFormat WPQAkash Singh TomarNoch keine Bewertungen
- IcatDokument122 SeitenIcatViraj ParmarNoch keine Bewertungen
- Industrial Attachment ReportDokument20 SeitenIndustrial Attachment ReportAlbert OjiamboNoch keine Bewertungen
- Statically Indeterminate BeamsDokument7 SeitenStatically Indeterminate BeamsMary Jane PelaezNoch keine Bewertungen
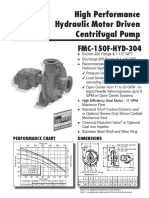
- FMC-150F-HYD-304 - 04-13 Bomba AceDokument2 SeitenFMC-150F-HYD-304 - 04-13 Bomba AceEmerson GomesNoch keine Bewertungen
- Quiz 2 2013 ThermodynamicDokument2 SeitenQuiz 2 2013 ThermodynamicPaartiban PaneerselvamNoch keine Bewertungen
- V Clic Workshop ManualDokument44 SeitenV Clic Workshop ManualWG-Friend IvybridgeNoch keine Bewertungen
- Building Utilities Reviewer ComprehensiveDokument3 SeitenBuilding Utilities Reviewer ComprehensiveReynald HarrisNoch keine Bewertungen
- College of Engineering Process Control Lab.: Basrah UniversityDokument11 SeitenCollege of Engineering Process Control Lab.: Basrah UniversityhanaNoch keine Bewertungen
- Installation, Operation and Maintenance Instructions Stainless Steel, Liquid Ring Vacuum PumpsDokument28 SeitenInstallation, Operation and Maintenance Instructions Stainless Steel, Liquid Ring Vacuum PumpspinplataNoch keine Bewertungen
- CHE 303 - Chemical Engineering Thermodynamics II / All Sections First Semester 2011 - 2012Dokument2 SeitenCHE 303 - Chemical Engineering Thermodynamics II / All Sections First Semester 2011 - 2012ArielNoch keine Bewertungen
- Fluids and LubricantsDokument2 SeitenFluids and LubricantsRUN GONoch keine Bewertungen
- 9 Storage TanksDokument10 Seiten9 Storage TanksFebriannada Abiyyu100% (1)
- IRN 15 18.5 KW (20 25 HP) IRN 22 30 KW (30 40 HP) : Operation and Maintenance ManualDokument172 SeitenIRN 15 18.5 KW (20 25 HP) IRN 22 30 KW (30 40 HP) : Operation and Maintenance ManualNikolay VelchevNoch keine Bewertungen
- Facts at Your Fingertips-201104-Hopper Inserts For Improved Solids FlowDokument1 SeiteFacts at Your Fingertips-201104-Hopper Inserts For Improved Solids Flowonizuka-t2263Noch keine Bewertungen
- of MotorvaneDokument3 Seitenof MotorvaneJeevan BabuNoch keine Bewertungen
- Ne6 3911gb-MidlumDokument234 SeitenNe6 3911gb-MidlumDinu GabrielNoch keine Bewertungen
- Stair Well Pressurization Design CriteriaDokument2 SeitenStair Well Pressurization Design CriteriaShabeer HamzaNoch keine Bewertungen
- 2 Trident Dryer Package (0421)Dokument29 Seiten2 Trident Dryer Package (0421)Jorge RicaurteNoch keine Bewertungen