Das könnte Ihnen auch gefallen
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (119)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (587)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2219)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (894)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Mastering Systems Thinking in Practice PrintableDokument169 SeitenMastering Systems Thinking in Practice PrintableGerman Lamboglia100% (3)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- Requirement Traceability Matrix (RTM)Dokument4 SeitenRequirement Traceability Matrix (RTM)Ravikanth LNoch keine Bewertungen
- CPD Elv BMSDokument93 SeitenCPD Elv BMSscribd99190Noch keine Bewertungen
- AI in CybersecurityDokument15 SeitenAI in CybersecuritymohanNoch keine Bewertungen
- Perspectives of BPRDokument64 SeitenPerspectives of BPRNilabjo Kanti Paul100% (1)
- Designing Social Systems in A Changing World - Bela BanathyDokument389 SeitenDesigning Social Systems in A Changing World - Bela BanathyJesus is a tiger OfficialNoch keine Bewertungen
- Knowledge Domain To Plo To Course To Taxonomy Level To Level of Emphasis Mapping Version 3Dokument35 SeitenKnowledge Domain To Plo To Course To Taxonomy Level To Level of Emphasis Mapping Version 3Nabeel KhalidNoch keine Bewertungen
- Notice For TeachersDokument1 SeiteNotice For TeachersNabeel KhalidNoch keine Bewertungen
- Instrumentation and Control (MEN-4113) : Instructor: Nabeel KhalidDokument14 SeitenInstrumentation and Control (MEN-4113) : Instructor: Nabeel KhalidNabeel KhalidNoch keine Bewertungen
- Outline For Instrumentation & Control LabDokument2 SeitenOutline For Instrumentation & Control LabNabeel KhalidNoch keine Bewertungen
- Assignmnet 1 EDCDokument1 SeiteAssignmnet 1 EDCNabeel KhalidNoch keine Bewertungen
- Quiz 1 ECSolDokument3 SeitenQuiz 1 ECSolNabeel KhalidNoch keine Bewertungen
- Advance Digital Signal Processing Matlab Assignment QuestionsDokument2 SeitenAdvance Digital Signal Processing Matlab Assignment QuestionsNabeel KhalidNoch keine Bewertungen
- IEEE FormateDokument5 SeitenIEEE FormatelizaNoch keine Bewertungen
- Assignment-3 1. Solve The Following Problems. (CLO-2)Dokument2 SeitenAssignment-3 1. Solve The Following Problems. (CLO-2)Nabeel KhalidNoch keine Bewertungen
- Assign 3Dokument2 SeitenAssign 3Nabeel KhalidNoch keine Bewertungen
- Outcomes and OutlinesDokument7 SeitenOutcomes and OutlinesNabeel KhalidNoch keine Bewertungen
- Instrumentation and Control (MEN-4113) : Instructor: Nabeel KhalidDokument15 SeitenInstrumentation and Control (MEN-4113) : Instructor: Nabeel KhalidNabeel KhalidNoch keine Bewertungen
- Quiz 1 - EBDokument1 SeiteQuiz 1 - EBNabeel KhalidNoch keine Bewertungen
- Quiz 1 EBSolDokument3 SeitenQuiz 1 EBSolNabeel KhalidNoch keine Bewertungen
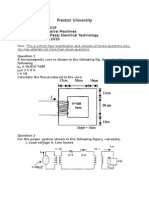
- Electrical Machines Mid Sunday (S-14)Dokument1 SeiteElectrical Machines Mid Sunday (S-14)Nabeel KhalidNoch keine Bewertungen
- Handout 01Dokument3 SeitenHandout 01Nabeel KhalidNoch keine Bewertungen
- UCP Engg Faculty Instrumentation AssignmentDokument4 SeitenUCP Engg Faculty Instrumentation AssignmentNabeel KhalidNoch keine Bewertungen
- Quiz 1 - EBDokument1 SeiteQuiz 1 - EBNabeel KhalidNoch keine Bewertungen
- UCP Engg Faculty Instrumentation AssignmentDokument4 SeitenUCP Engg Faculty Instrumentation AssignmentNabeel KhalidNoch keine Bewertungen
- Industrial MachinesDokument3 SeitenIndustrial MachinesNabeel KhalidNoch keine Bewertungen
- Industrial Electronics (ESN-3223) : Instructors: Nabeel KhalidDokument8 SeitenIndustrial Electronics (ESN-3223) : Instructors: Nabeel KhalidNabeel KhalidNoch keine Bewertungen
- I&M Lab Plan Spring 2015Dokument2 SeitenI&M Lab Plan Spring 2015Nabeel KhalidNoch keine Bewertungen
- Midterm Exam Questions on Electric CircuitsDokument1 SeiteMidterm Exam Questions on Electric CircuitsNabeel KhalidNoch keine Bewertungen
- Course OutlineDokument5 SeitenCourse OutlineNabeel KhalidNoch keine Bewertungen
- Industrial Electronics ESN 3223: Instructor: Engr. Nabeel KhalidDokument12 SeitenIndustrial Electronics ESN 3223: Instructor: Engr. Nabeel KhalidNabeel KhalidNoch keine Bewertungen
- UCP Engg Faculty Instrumentation AssignmentDokument4 SeitenUCP Engg Faculty Instrumentation AssignmentNabeel KhalidNoch keine Bewertungen
- Electric Circuit ObjectiveDokument1 SeiteElectric Circuit ObjectiveNabeel KhalidNoch keine Bewertungen
- Superior College of Technology: Electric Circuits-1 Spring 2014 Instructor: Nabeel KhalidDokument2 SeitenSuperior College of Technology: Electric Circuits-1 Spring 2014 Instructor: Nabeel KhalidNabeel KhalidNoch keine Bewertungen
- Automotive Control EngineeringDokument2 SeitenAutomotive Control EngineeringChatrapal SinghNoch keine Bewertungen
- Machine Learning For Side-Channel Analysis: Stjepan Picek TU Delft, The NetherlandsDokument52 SeitenMachine Learning For Side-Channel Analysis: Stjepan Picek TU Delft, The NetherlandsMircea PetrescuNoch keine Bewertungen
- Ca4C Rt11 - System Analysis & Software EngineeringDokument2 SeitenCa4C Rt11 - System Analysis & Software Engineeringjobishchirayath1219Noch keine Bewertungen
- 4 Lecture 1 Thermo 1Dokument11 Seiten4 Lecture 1 Thermo 1Ahmed Al-ayatNoch keine Bewertungen
- Digital SIgnal ProcessingDokument19 SeitenDigital SIgnal ProcessingRanaissanceNoch keine Bewertungen
- Introduction To Instrumentation and Control EngineeringDokument38 SeitenIntroduction To Instrumentation and Control EngineeringJames GupoNoch keine Bewertungen
- eduMIP ReportDokument48 SeiteneduMIP ReportmarcosfidelmeraNoch keine Bewertungen
- Ch1 IntroductionDSPDokument19 SeitenCh1 IntroductionDSPtrlulelemisticodelaNoch keine Bewertungen
- Assignment - 1 Stat MechDokument2 SeitenAssignment - 1 Stat MechAmit KumarNoch keine Bewertungen
- Se MCQ Unit 2Dokument6 SeitenSe MCQ Unit 2MANISH SHARMANoch keine Bewertungen
- Lab 3heatengine PhysicDokument3 SeitenLab 3heatengine Physicapi-263500375Noch keine Bewertungen
- Chapter 03 - Chaotic Synchronization, Conditional Lyapunov Exponents and Lyapunov's Direct MethodDokument30 SeitenChapter 03 - Chaotic Synchronization, Conditional Lyapunov Exponents and Lyapunov's Direct Method王和盛Noch keine Bewertungen
- 3rd Law of Thermodynamic PDFDokument19 Seiten3rd Law of Thermodynamic PDFMarcoWetzelNoch keine Bewertungen
- 02 - Software ProcessesDokument20 Seiten02 - Software ProcessesHanNoch keine Bewertungen
- Simulating Control Systems With Simulink and MATLABDokument5 SeitenSimulating Control Systems With Simulink and MATLABsaharNoch keine Bewertungen
- 030 Integer Programming PDFDokument26 Seiten030 Integer Programming PDFPranay VigNoch keine Bewertungen
- Me 471 Closed Loop Hydraulic Positioning SystemDokument4 SeitenMe 471 Closed Loop Hydraulic Positioning SystemAbhishek KumbalurNoch keine Bewertungen
- Adams or Simulink - Slider CrankDokument4 SeitenAdams or Simulink - Slider CrankAbhilashUNNoch keine Bewertungen
- Training Calendar (2017) : School of Quality: Iso 9001:2015 - Quality Management SystemDokument1 SeiteTraining Calendar (2017) : School of Quality: Iso 9001:2015 - Quality Management SystemHasbullah MohdNoch keine Bewertungen
- Frequency-Domain Analysis: Esime Upt Ipn Aircraft Control SystemsDokument20 SeitenFrequency-Domain Analysis: Esime Upt Ipn Aircraft Control SystemsRafael SanchezNoch keine Bewertungen
- Cyber Physical Systems: Theory and Its ApplicationsDokument5 SeitenCyber Physical Systems: Theory and Its ApplicationsInternational Journal of Innovative Science and Research TechnologyNoch keine Bewertungen
- Lab 3Dokument14 SeitenLab 3Maitha SaeedNoch keine Bewertungen
- P, PI, PD & PID Controllers ApproachesDokument77 SeitenP, PI, PD & PID Controllers ApproachesTushit ThakkarNoch keine Bewertungen
- The First Law of Thermodynamics: Closed Systems: Çengel BolesDokument38 SeitenThe First Law of Thermodynamics: Closed Systems: Çengel Boleskebaman1986Noch keine Bewertungen