Das könnte Ihnen auch gefallen
- The Resulting Ripple Factor IsDokument10 SeitenThe Resulting Ripple Factor IsBharat LalNoch keine Bewertungen
- Snoa842 PDFDokument13 SeitenSnoa842 PDFBiswajit SinghNoch keine Bewertungen
- Ltech ReportDokument19 SeitenLtech Reportumesh kubdeNoch keine Bewertungen
- Lic QB - 2 Marks Unit I & IiDokument7 SeitenLic QB - 2 Marks Unit I & Iisanthosh sekarNoch keine Bewertungen
- Ee6303 - Linear Integrated Circuits and ApplicationsDokument19 SeitenEe6303 - Linear Integrated Circuits and ApplicationsBALAKRISHNANNoch keine Bewertungen
- LIC Question BankDokument7 SeitenLIC Question BankParvathy S ParvathyNoch keine Bewertungen
- Act 4065Dokument9 SeitenAct 4065bob75Noch keine Bewertungen
- BB DEsign 1Dokument7 SeitenBB DEsign 1nandhakumarmeNoch keine Bewertungen
- Common Emitter Transistor Amplifier BasicsDokument9 SeitenCommon Emitter Transistor Amplifier BasicssalmanNoch keine Bewertungen
- Ee6303 - Linear Integrated Circuits and Applications Unit-I Circuit Configuration For Linear IcsDokument18 SeitenEe6303 - Linear Integrated Circuits and Applications Unit-I Circuit Configuration For Linear IcsNarasimha KumarNoch keine Bewertungen
- Analog Fault DerivationDokument89 SeitenAnalog Fault DerivationSachidananda SwarNoch keine Bewertungen
- ECE 334 Chapter 5 Biopolar Small Signal TransistorsDokument9 SeitenECE 334 Chapter 5 Biopolar Small Signal TransistorsSachithHiroshanaWijethungaNoch keine Bewertungen
- EMC Filter For DCDC Switching Controller OptimizedDokument6 SeitenEMC Filter For DCDC Switching Controller OptimizedPetr BruzaNoch keine Bewertungen
- Linear Integrated CircuitsDokument15 SeitenLinear Integrated CircuitsAISWARYA MNoch keine Bewertungen
- EC302Dokument26 SeitenEC302api-3853441Noch keine Bewertungen
- Operational Amplifier RealDokument57 SeitenOperational Amplifier RealSahmit Samuel KoromaNoch keine Bewertungen
- Ke 20503Dokument34 SeitenKe 20503Iqxca AzmYaniNoch keine Bewertungen
- AND8099/D 5.0 V, 2.0 A Flyback Converter: Application NoteDokument8 SeitenAND8099/D 5.0 V, 2.0 A Flyback Converter: Application NoteIgor MairinckNoch keine Bewertungen
- A New Planar Output Inductor For High Current, Low Voltage, DC-DC Converters byDokument11 SeitenA New Planar Output Inductor For High Current, Low Voltage, DC-DC Converters byPino Giuseppe GraccioneNoch keine Bewertungen
- Power Supply DesignDokument8 SeitenPower Supply DesignMario Plinio CrivelliNoch keine Bewertungen
- Maths OperationDokument27 SeitenMaths OperationTurkish GatxyNoch keine Bewertungen
- Experiment 3 Eng NaderDokument7 SeitenExperiment 3 Eng Naderياسر العويطيNoch keine Bewertungen
- Industrial Applications of ElectronicsDokument15 SeitenIndustrial Applications of ElectronicsVignesh Meda VenkateshNoch keine Bewertungen
- Ancrct 4 ImpDokument1 SeiteAncrct 4 Impramesh_br85100% (1)
- Exercise On Analog Circuits: PHYS 331: Junior Physics Laboratory IDokument6 SeitenExercise On Analog Circuits: PHYS 331: Junior Physics Laboratory Iviso167Noch keine Bewertungen
- Application Guide: Designing RC Snubber NetworksDokument3 SeitenApplication Guide: Designing RC Snubber NetworksThrawn Mitth'rawnuruodoNoch keine Bewertungen
- Linear IC ApplicationsDokument8 SeitenLinear IC ApplicationsSwarna SugandhNoch keine Bewertungen
- Iia Module Iii PDFDokument13 SeitenIia Module Iii PDFgayathri vishnuNoch keine Bewertungen
- 6-ECG Circuit-PreparedDokument29 Seiten6-ECG Circuit-PreparedFarhanNoch keine Bewertungen
- Buck Converter Design DemystifiedDokument6 SeitenBuck Converter Design DemystifiedEric MorissetNoch keine Bewertungen
- 39.robert MihayoDokument20 Seiten39.robert Mihayohussein omaryNoch keine Bewertungen
- Answers To Common Questions About Audio TransformersDokument2 SeitenAnswers To Common Questions About Audio TransformersValeriano ChiaravalleNoch keine Bewertungen
- Question Bank, 2 Marks With AnswersDokument30 SeitenQuestion Bank, 2 Marks With AnswersbinukirubaNoch keine Bewertungen
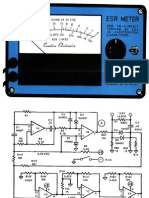
- ESR Meter Package PDFDokument5 SeitenESR Meter Package PDFOscar PachecoNoch keine Bewertungen
- Current Sensor Ic 4017Dokument55 SeitenCurrent Sensor Ic 4017Alan RejiNoch keine Bewertungen
- Chapter 4 Multistage Amplifier1Dokument25 SeitenChapter 4 Multistage Amplifier1yuwarajaNoch keine Bewertungen
- Power Supply Linear RegulatorDokument11 SeitenPower Supply Linear RegulatorSurbhi100% (1)
- Constant Current SourceDokument5 SeitenConstant Current SourceAnonymous TPVfFif6TONoch keine Bewertungen
- Project Description October 2011Dokument7 SeitenProject Description October 2011Daniel Norberto DemariaNoch keine Bewertungen
- Ec1254 - Linear Integrated Circuits Unit-I Circuit Configuration For Linear IcsDokument17 SeitenEc1254 - Linear Integrated Circuits Unit-I Circuit Configuration For Linear IcsvanchimalarNoch keine Bewertungen
- Presentation On Ferrite Core TransformerDokument46 SeitenPresentation On Ferrite Core TransformerAsad TararNoch keine Bewertungen
- Pulse Oximetry CircuitDokument19 SeitenPulse Oximetry Circuitنواف الجهنيNoch keine Bewertungen
- Chap - 4 - DC Regulated Power SupplyDokument65 SeitenChap - 4 - DC Regulated Power SupplyanshikahjjpNoch keine Bewertungen
- High Power High Efficiency Buck Converter Circuit Using TL494Dokument15 SeitenHigh Power High Efficiency Buck Converter Circuit Using TL494Koushik Maity100% (1)
- Unit 2Dokument6 SeitenUnit 2ShanilDayalanNoch keine Bewertungen
- Question Bank, 2 Marks With AnswersDokument24 SeitenQuestion Bank, 2 Marks With AnswersLohanathan VkNoch keine Bewertungen
- 9910 An-H48Dokument4 Seiten9910 An-H48Adii HernandezNoch keine Bewertungen
- Lic QB With AnswerDokument29 SeitenLic QB With AnswerNoddy SenNoch keine Bewertungen
- Digital Thermometer Report FinalDokument29 SeitenDigital Thermometer Report FinalRahul Agarwal100% (1)
- 53 36765 ME591 2012 1 1 1 Analog Signal ConditionningDokument58 Seiten53 36765 ME591 2012 1 1 1 Analog Signal ConditionningAbhishek KumbalurNoch keine Bewertungen
- 12v DC To 220v AC Converter Circuit Using Astable MultivibratorDokument3 Seiten12v DC To 220v AC Converter Circuit Using Astable MultivibratorKïshörë0% (1)
- General Description Features: Wide Input 3A Step-Down ConverterDokument10 SeitenGeneral Description Features: Wide Input 3A Step-Down Converterban4444Noch keine Bewertungen
- td750 457backtobackDokument3 Seitentd750 457backtoback41005064Noch keine Bewertungen
- Switchyard EquipmentDokument73 SeitenSwitchyard EquipmentAbhishek Kumar Jha100% (1)
- Voltage Mode ControlDokument32 SeitenVoltage Mode Controlvivek saiNoch keine Bewertungen
- Application Note An-1052: Using The Ir217X Linear Current Sensing IcsDokument7 SeitenApplication Note An-1052: Using The Ir217X Linear Current Sensing IcsLullaby summerNoch keine Bewertungen
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Von EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Bewertung: 2.5 von 5 Sternen2.5/5 (3)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Von EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Noch keine Bewertungen
- Specsheet Eng Cd350Dokument3 SeitenSpecsheet Eng Cd350naiad09Noch keine Bewertungen
- Infineon-Pelincec 2005 Dynamic Voltage Rise Control-ED-V1.0-EnDokument6 SeitenInfineon-Pelincec 2005 Dynamic Voltage Rise Control-ED-V1.0-Ennaiad09Noch keine Bewertungen
- Linear Regulators Fundamentals and CompensationDokument32 SeitenLinear Regulators Fundamentals and Compensationnaiad09Noch keine Bewertungen
- Comparative Measurements On Loudspeaker Distortion: Current vs. Voltage ControlDokument11 SeitenComparative Measurements On Loudspeaker Distortion: Current vs. Voltage Controlnaiad09Noch keine Bewertungen
- Data Sheet TRIO-20 - 0-27 - 6 - BCD - 00379 - EN - Rev ADokument4 SeitenData Sheet TRIO-20 - 0-27 - 6 - BCD - 00379 - EN - Rev Anaiad09Noch keine Bewertungen
- Resonance ConverterDokument30 SeitenResonance ConverterAhmed Mortuza Saleque SaikotNoch keine Bewertungen
- Data Sheet: Shunts Class 0.5Dokument4 SeitenData Sheet: Shunts Class 0.5naiad09Noch keine Bewertungen
- Multi-Series Connection High-Voltage IGBTsDokument4 SeitenMulti-Series Connection High-Voltage IGBTsnaiad09Noch keine Bewertungen
- Acm 802ne Instruction For UseDokument158 SeitenAcm 802ne Instruction For Usenaiad09Noch keine Bewertungen
- Fundamentals of Floating Measurements and Isolated Input Oscilloscopes - Tektronix - 3AW - 19134 - 2 - MR - LetterDokument8 SeitenFundamentals of Floating Measurements and Isolated Input Oscilloscopes - Tektronix - 3AW - 19134 - 2 - MR - LetterluroguitaNoch keine Bewertungen
- Grounding and Shielding Audio DevicesDokument12 SeitenGrounding and Shielding Audio DevicesFalco CorvaroNoch keine Bewertungen
- Linkwitz Riley Crossovers PrimerDokument14 SeitenLinkwitz Riley Crossovers Primeruh8spam2junk1Noch keine Bewertungen
- 8-Bit I2C-bus and SMBus I/O Port With Interrupt, 2-Kbit EEPROM and 6 Address PinsDokument28 Seiten8-Bit I2C-bus and SMBus I/O Port With Interrupt, 2-Kbit EEPROM and 6 Address Pinsnaiad09Noch keine Bewertungen
- A Modular Winding SystemsDokument7 SeitenA Modular Winding Systemsnaiad09Noch keine Bewertungen
- Grounding and ShieldingDokument2 SeitenGrounding and ShieldingKaran AnejaNoch keine Bewertungen
- Ti-82 StatsDokument442 SeitenTi-82 StatsJava RobNoch keine Bewertungen
- 5990 7633enDokument2 Seiten5990 7633ennaiad09Noch keine Bewertungen
- Infineon Selection-Guide High ResDokument86 SeitenInfineon Selection-Guide High Resnaiad09Noch keine Bewertungen
- Desktop 6th Gen Core Family Datasheet Vol 1Dokument128 SeitenDesktop 6th Gen Core Family Datasheet Vol 1Ricardo DippNoch keine Bewertungen
- DSA800 Options&AccessoriesDokument18 SeitenDSA800 Options&Accessoriesnaiad09Noch keine Bewertungen
- HP4194A Impedance/Gain-Phase Analazer Service ManualDokument433 SeitenHP4194A Impedance/Gain-Phase Analazer Service Manualnaiad09Noch keine Bewertungen
- High Current Inductor For EV (PHEV, FCEV) : Changsung CorpDokument10 SeitenHigh Current Inductor For EV (PHEV, FCEV) : Changsung Corpnaiad09Noch keine Bewertungen
- Design and Specification of Harmonic Filters For Variable Frequency DrivesDokument8 SeitenDesign and Specification of Harmonic Filters For Variable Frequency DrivestatacpsNoch keine Bewertungen
- Jlpea 03 00001Dokument8 SeitenJlpea 03 00001naiad09Noch keine Bewertungen
- Ford Escort, Orion 1990-97Dokument269 SeitenFord Escort, Orion 1990-97naiad090% (1)
- Calculating Parasitic Capacitance of Three-Phase Common Mode ChokeDokument6 SeitenCalculating Parasitic Capacitance of Three-Phase Common Mode Chokenaiad09Noch keine Bewertungen
- EPCOS EMC Filter GeneralDokument63 SeitenEPCOS EMC Filter Generalnaiad09Noch keine Bewertungen
- Electrolux Ewm100 Washing Machine SMDokument59 SeitenElectrolux Ewm100 Washing Machine SMEsteban Garcia100% (3)
- Applied III, Worksheet 1Dokument4 SeitenApplied III, Worksheet 1mintuwondeNoch keine Bewertungen
- Scs 210 AmDokument6 SeitenScs 210 AmAntonio CabelloNoch keine Bewertungen
- CPT Brochure 1Dokument12 SeitenCPT Brochure 1jose antonio becerra mosqueraNoch keine Bewertungen
- Sound Isolation 2017Dokument81 SeitenSound Isolation 2017vartika guptaNoch keine Bewertungen
- SR Capital Public SchoolDokument6 SeitenSR Capital Public SchoolLakshya KumarNoch keine Bewertungen
- Astm d4945Dokument7 SeitenAstm d4945M.Malyadri ReddyNoch keine Bewertungen
- ACA 2010 Abstracts Manish Chandra PathakDokument602 SeitenACA 2010 Abstracts Manish Chandra Pathakpmcy2Noch keine Bewertungen
- Lift Stability AnalysisDokument23 SeitenLift Stability Analysisaiyubi2Noch keine Bewertungen
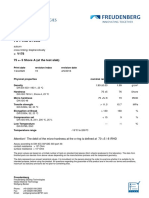
- FST - 70 FKM 37508 enDokument2 SeitenFST - 70 FKM 37508 enXavierNoch keine Bewertungen
- Electric Motor Problems & Diagnostic TechniquesDokument12 SeitenElectric Motor Problems & Diagnostic Techniquesjuanca249Noch keine Bewertungen
- Practice Problems 4 and 5Dokument3 SeitenPractice Problems 4 and 5shuckss taloNoch keine Bewertungen
- B. Sc. IC Semester III To VIDokument29 SeitenB. Sc. IC Semester III To VIJainam JoshiNoch keine Bewertungen
- Unit I - Force Analysis (9) : Systems and Tribology ConceptDokument82 SeitenUnit I - Force Analysis (9) : Systems and Tribology ConceptSaranNoch keine Bewertungen
- HGV Gas Fuel Throttle ValveDokument41 SeitenHGV Gas Fuel Throttle ValveSayayinNoch keine Bewertungen
- R.pearson - Key To Consciousness. Quantum GravitationDokument16 SeitenR.pearson - Key To Consciousness. Quantum GravitationJorgee_Porgee_8203Noch keine Bewertungen
- Topographical Surveys - Direct LevellingDokument1 SeiteTopographical Surveys - Direct LevellingTsegab DereseNoch keine Bewertungen
- A Comparison of IEC 479-1 and IEEE STD 80 On Grounding Safety CriteriaDokument10 SeitenA Comparison of IEC 479-1 and IEEE STD 80 On Grounding Safety Criteriaperijoy100% (1)
- Bass Instruments: Installation and Instruction ManualDokument34 SeitenBass Instruments: Installation and Instruction ManualYul GoncalvesNoch keine Bewertungen
- Lighting ModuleDokument133 SeitenLighting ModulePrashanth KochuveetilNoch keine Bewertungen
- Ind UnitDokument33 SeitenInd UnitSana SanNoch keine Bewertungen
- Firewater Hydraulic Study Report Detailed Engineering Design Oml-24 Crude Storage Tanks and De-Watering ProjectDokument22 SeitenFirewater Hydraulic Study Report Detailed Engineering Design Oml-24 Crude Storage Tanks and De-Watering ProjectPatrick AyanNoch keine Bewertungen
- Hydrologic CycleDokument35 SeitenHydrologic CycleFachri JahriNoch keine Bewertungen
- SilverThin Slewing Rings and Pinions CatalogDokument16 SeitenSilverThin Slewing Rings and Pinions CatalogGanesh LohakareNoch keine Bewertungen
- Soul Purpose FormulaDokument6 SeitenSoul Purpose Formulanpclap100% (2)
- How To Learn, by Simon Oxenham, 15 Feb. 2013: Learning MethodsDokument5 SeitenHow To Learn, by Simon Oxenham, 15 Feb. 2013: Learning MethodsAnonymous Z1NYxC6hgYNoch keine Bewertungen
- 8.8 Boiler Efficiency TestDokument17 Seiten8.8 Boiler Efficiency TestRINJUNoch keine Bewertungen
- Delta Industrial Articulated Robot SeriesDokument15 SeitenDelta Industrial Articulated Robot Seriesrobotech automationNoch keine Bewertungen
- A. Kitaigorodsky - I Am A Physicist (1971, Mir Publishers)Dokument221 SeitenA. Kitaigorodsky - I Am A Physicist (1971, Mir Publishers)dal pesNoch keine Bewertungen
- Neuro ThermodynamicsDokument32 SeitenNeuro ThermodynamicsNanjit KumarNoch keine Bewertungen