Das könnte Ihnen auch gefallen
- Aerospace Actuators V3: European Commercial Aircraft and Tiltrotor AircraftVon EverandAerospace Actuators V3: European Commercial Aircraft and Tiltrotor AircraftNoch keine Bewertungen
- The Grid 2: Blueprint for a New Computing InfrastructureVon EverandThe Grid 2: Blueprint for a New Computing InfrastructureNoch keine Bewertungen
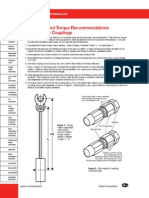
- Coupling Torque RecommendationsDokument2 SeitenCoupling Torque RecommendationsriteshsamantrayNoch keine Bewertungen
- 30508Dokument36 Seiten30508Raphael Felipe Gama RibeiroNoch keine Bewertungen
- Turboshaft Engine Air Particle Separation: Progress in Aerospace Sciences July 2010Dokument88 SeitenTurboshaft Engine Air Particle Separation: Progress in Aerospace Sciences July 2010abuzaidNoch keine Bewertungen
- Faa Ac29-2cDokument1.258 SeitenFaa Ac29-2crobbertmdNoch keine Bewertungen
- Temperature Measurement Problems in An Aero Gas Turbine EngineDokument5 SeitenTemperature Measurement Problems in An Aero Gas Turbine EnginesenthilNoch keine Bewertungen
- (BOSCH汽车工程手册 第二版 2002) BOSCH Automotive Handbook 2002Dokument1.390 Seiten(BOSCH汽车工程手册 第二版 2002) BOSCH Automotive Handbook 2002James Jiang100% (1)
- GasTurb11 PDFDokument256 SeitenGasTurb11 PDFMartin JavierNoch keine Bewertungen
- Gas Turbine Disc Stress CalculationsDokument3 SeitenGas Turbine Disc Stress CalculationsKishore MylavarapuNoch keine Bewertungen
- CFD Analysis of Ventilation System For An Engine Room: December 2016Dokument13 SeitenCFD Analysis of Ventilation System For An Engine Room: December 2016Vincent RogNoch keine Bewertungen
- Ceb A 72 4095Dokument10 SeitenCeb A 72 4095turboshaftNoch keine Bewertungen
- Naca Report 640Dokument23 SeitenNaca Report 640Arturo ValenciaNoch keine Bewertungen
- BV Rules PtE Ch3 Sec1 AUT-UMSDokument21 SeitenBV Rules PtE Ch3 Sec1 AUT-UMSJon LopezNoch keine Bewertungen
- Operation and Performance Measurement On Engines in Sea Level Test Facilitiesd CDokument177 SeitenOperation and Performance Measurement On Engines in Sea Level Test Facilitiesd Cdijayof87Noch keine Bewertungen
- Supplement Airplane Maintenance Manual: Cessna 172 TAE 125-01Dokument156 SeitenSupplement Airplane Maintenance Manual: Cessna 172 TAE 125-01jhonNoch keine Bewertungen
- Padmini 1Dokument37 SeitenPadmini 1Padmíní GøwdaNoch keine Bewertungen
- Aero Supplies - Catalogue CHAPTER 6 (505-595) PDFDokument91 SeitenAero Supplies - Catalogue CHAPTER 6 (505-595) PDFJerome Cardenas TablacNoch keine Bewertungen
- KAT Series PDFDokument27 SeitenKAT Series PDFRashel HasanNoch keine Bewertungen
- Repair CompositeDokument22 SeitenRepair Compositekashish4uNoch keine Bewertungen
- Spesifikasi Atlas Copco ZT 30Dokument5 SeitenSpesifikasi Atlas Copco ZT 30Fithrul MubarokNoch keine Bewertungen
- Development and Testing of A Reconfigurable Gasoline Engine ContrDokument254 SeitenDevelopment and Testing of A Reconfigurable Gasoline Engine ContrmhemaraNoch keine Bewertungen
- A Seminar Report On Aircraft Propulsion SystemDokument24 SeitenA Seminar Report On Aircraft Propulsion SystemMallikarjun KesarabhaviNoch keine Bewertungen
- STD Specification For Design and Integration of Fuel Energy Storage F3063Dokument7 SeitenSTD Specification For Design and Integration of Fuel Energy Storage F3063Kobus PretoriusNoch keine Bewertungen
- Hartzell Maintenance ManualDokument286 SeitenHartzell Maintenance ManualalejandroNoch keine Bewertungen
- EASA TCDS IM E 090 - PW1500G - Issue5 - 27022018Dokument16 SeitenEASA TCDS IM E 090 - PW1500G - Issue5 - 27022018cs100Noch keine Bewertungen
- PG 30Dokument26 SeitenPG 30Juan Carlos Soriano GiménezNoch keine Bewertungen
- 2017 Tubing InformationDokument28 Seiten2017 Tubing InformationSatyabrat GaanNoch keine Bewertungen
- Foam and Air ReleaseDokument5 SeitenFoam and Air ReleaseToppy ToppyNoch keine Bewertungen
- "Abhyas": Propulsion System For Abhyas - Single BoosterDokument15 Seiten"Abhyas": Propulsion System For Abhyas - Single BoosterChristina WheelerNoch keine Bewertungen
- Gas Turbine Technology Evolution: A Designer'S Perspective: Turbovision, Inc., Palm Beach Gardens, Florida 33418Dokument19 SeitenGas Turbine Technology Evolution: A Designer'S Perspective: Turbovision, Inc., Palm Beach Gardens, Florida 33418John Carella100% (1)
- Bell 407 PSL 1701Dokument6 SeitenBell 407 PSL 1701MahmudNoch keine Bewertungen
- The Annular Combustion Chamber With Centrifugal Fuel Injection PDFDokument6 SeitenThe Annular Combustion Chamber With Centrifugal Fuel Injection PDFFernando TaleroNoch keine Bewertungen
- Jetcat: Instruction Manual V6.0 EcuDokument61 SeitenJetcat: Instruction Manual V6.0 Ecumohamed sidkyNoch keine Bewertungen
- 912 Installation Manual d04967 PDFDokument199 Seiten912 Installation Manual d04967 PDFZENAIRSTOLCH701Noch keine Bewertungen
- Gas Turb 9 ManualDokument222 SeitenGas Turb 9 ManualIlmirNoch keine Bewertungen
- CAIP Vol II PropellersDokument32 SeitenCAIP Vol II PropellersSHM 555Noch keine Bewertungen
- Benefits of Variable Area NozzlesDokument18 SeitenBenefits of Variable Area Nozzlesivillen001Noch keine Bewertungen
- Aircraft Engine MaintenanceDokument8 SeitenAircraft Engine MaintenanceTamer Abd El HamedNoch keine Bewertungen
- Caip Part IDokument728 SeitenCaip Part IEncik FekryNoch keine Bewertungen
- Parker TubingDokument85 SeitenParker TubingPatrick StivénNoch keine Bewertungen
- EJ200Dokument2 SeitenEJ200Srinivasan SriniNoch keine Bewertungen
- AE 2304 Propulsion II 2 Marks PDFDokument13 SeitenAE 2304 Propulsion II 2 Marks PDFvaskaneNoch keine Bewertungen
- O Ring GB en PDFDokument215 SeitenO Ring GB en PDFPéter BorbásNoch keine Bewertungen
- Aerodynamics and Aircraft PropulsionDokument25 SeitenAerodynamics and Aircraft PropulsionNarendra PalandeNoch keine Bewertungen
- PT6A 25SBindex CGA PDFDokument20 SeitenPT6A 25SBindex CGA PDFandresNoch keine Bewertungen
- Repair Assessment Procedure and Integrated Design (RAPID Ver 3.0)Dokument90 SeitenRepair Assessment Procedure and Integrated Design (RAPID Ver 3.0)gansito23100% (1)
- Agard CFD PDFDokument492 SeitenAgard CFD PDFVinoth NagarajNoch keine Bewertungen
- TM 9-1725 Ordnance Engine Model R975-C4 (Continental) 1944Dokument272 SeitenTM 9-1725 Ordnance Engine Model R975-C4 (Continental) 1944beppefranzNoch keine Bewertungen
- Operator Manual Series GEM OEM Industrial Lasers GEMDokument0 SeitenOperator Manual Series GEM OEM Industrial Lasers GEMДраган РакићNoch keine Bewertungen
- DS CF90D4Dokument1 SeiteDS CF90D4arieprachmanNoch keine Bewertungen
- Gas Turbine Study Material - ch3Dokument18 SeitenGas Turbine Study Material - ch3Mauro MLRNoch keine Bewertungen
- 101101002Dokument6 Seiten101101002Ahmed shawkyNoch keine Bewertungen
- CFD Project TitlesDokument2 SeitenCFD Project TitlesThota Sri K Haritha0% (1)
- Gek50364 File0004Dokument8 SeitenGek50364 File0004Alejandro Romero BallestasNoch keine Bewertungen
- Aircraft Engine Test StandsDokument2 SeitenAircraft Engine Test StandsVinod KumarNoch keine Bewertungen
- KOM Course FileDokument53 SeitenKOM Course FileSamiullah MohammedNoch keine Bewertungen
- General Student Guide 2013 Rev0Dokument24 SeitenGeneral Student Guide 2013 Rev0jjmartinez4356Noch keine Bewertungen
- MSC Curriculum Final Approved Version (04112015)Dokument42 SeitenMSC Curriculum Final Approved Version (04112015)semabayNoch keine Bewertungen
- Thermal Engineering IDokument50 SeitenThermal Engineering IanilNoch keine Bewertungen
- Urriculum Itae: SulaimanDokument1 SeiteUrriculum Itae: SulaimanSulaimanNoch keine Bewertungen
- Bimbingan 3Dokument19 SeitenBimbingan 3SulaimanNoch keine Bewertungen
- Why Am I Getting Temperature Divergence in AMG SolverDokument7 SeitenWhy Am I Getting Temperature Divergence in AMG SolverSulaimanNoch keine Bewertungen
- 1955 - Aerodynamic Properties of The 2.75-Inch Rocket TI3IDokument39 Seiten1955 - Aerodynamic Properties of The 2.75-Inch Rocket TI3ISulaimanNoch keine Bewertungen
- 57 210Dokument9 Seiten57 210SulaimanNoch keine Bewertungen
- 100 Hours Inspection M250 - C20Dokument55 Seiten100 Hours Inspection M250 - C20Sulaiman100% (1)
- Defueling ProcedureDokument1 SeiteDefueling ProcedureSulaimanNoch keine Bewertungen
- Instructional Decision MakingDokument5 SeitenInstructional Decision Makingapi-257693907Noch keine Bewertungen
- Masters Thesis Benyam 2011Dokument156 SeitenMasters Thesis Benyam 2011TechBoy65Noch keine Bewertungen
- Pamphlet On Arrangement of Springs in Various Casnub Trolleys Fitted On Air Brake Wagon PDFDokument9 SeitenPamphlet On Arrangement of Springs in Various Casnub Trolleys Fitted On Air Brake Wagon PDFNiKhil GuPtaNoch keine Bewertungen
- The Four Types of Gaps and How To Play Them PDFDokument17 SeitenThe Four Types of Gaps and How To Play Them PDFshaikiftakar100% (2)
- BIOL 2300 Homework 2 Summer2019Dokument2 SeitenBIOL 2300 Homework 2 Summer2019Tanner JohnsonNoch keine Bewertungen
- High School Physics Rutherford Atom Lesson 27Dokument4 SeitenHigh School Physics Rutherford Atom Lesson 27John JohnsonNoch keine Bewertungen
- CIT 811 TMA 4 Quiz QuestionDokument3 SeitenCIT 811 TMA 4 Quiz QuestionjohnNoch keine Bewertungen
- Attitude Scale For Mental IllnessDokument6 SeitenAttitude Scale For Mental IllnessSyed Faizan100% (7)
- Paper 1 Set 2 PDFDokument531 SeitenPaper 1 Set 2 PDFabdul rehman aNoch keine Bewertungen
- Management Accounting/Series-4-2011 (Code3024)Dokument18 SeitenManagement Accounting/Series-4-2011 (Code3024)Hein Linn Kyaw100% (2)
- ASC 2020-21 Questionnaire PDFDokument11 SeitenASC 2020-21 Questionnaire PDFShama PhotoNoch keine Bewertungen
- Estocell - Data Sheet - 14-07-06Dokument2 SeitenEstocell - Data Sheet - 14-07-06LeoRumalaAgusTatarNoch keine Bewertungen
- PCNSE DemoDokument11 SeitenPCNSE DemodezaxxlNoch keine Bewertungen
- Mother Tongue Based Instruction in The Newly Implemented K To 12 Curriculum of The PhilippinesDokument16 SeitenMother Tongue Based Instruction in The Newly Implemented K To 12 Curriculum of The PhilippinesEi JayNoch keine Bewertungen
- How To Connect To iSCSI Targets On QNAP NAS Using MPIO On Windows 2008Dokument30 SeitenHow To Connect To iSCSI Targets On QNAP NAS Using MPIO On Windows 2008Jazz OberoiNoch keine Bewertungen
- Cross CultureDokument134 SeitenCross CulturePhương AnnhNoch keine Bewertungen
- NBCC 2015 Seismic Design Examples in S-FRAME AnalysisDokument91 SeitenNBCC 2015 Seismic Design Examples in S-FRAME AnalysisMike Smith100% (1)
- Store Docket - Wood PeckerDokument89 SeitenStore Docket - Wood PeckerRakesh KumarNoch keine Bewertungen
- IAU Logbook Core 6weeksDokument7 SeitenIAU Logbook Core 6weeksbajariaaNoch keine Bewertungen
- Questionnaire OriginalDokument6 SeitenQuestionnaire OriginalJAGATHESANNoch keine Bewertungen
- MINDSET 1 EXERCISES TEST 1 Pendientes 1º Bach VOCABULARY AND GRAMMARDokument7 SeitenMINDSET 1 EXERCISES TEST 1 Pendientes 1º Bach VOCABULARY AND GRAMMARanaNoch keine Bewertungen
- Assignment On Unstable or Astatic Gravimeters and Marine Gravity SurveyDokument9 SeitenAssignment On Unstable or Astatic Gravimeters and Marine Gravity Surveyraian islam100% (1)
- Cruiziat Et Al. 2002Dokument30 SeitenCruiziat Et Al. 2002Juan David TurriagoNoch keine Bewertungen
- 12.3 What Is The Nomenclature System For CFCS/HCFCS/HFCS? (Chemistry)Dokument3 Seiten12.3 What Is The Nomenclature System For CFCS/HCFCS/HFCS? (Chemistry)Riska IndriyaniNoch keine Bewertungen
- British Airways Culture and StructureDokument29 SeitenBritish Airways Culture and Structure陆奕敏Noch keine Bewertungen
- Charging Station For E-Vehicle Using Solar With IOTDokument6 SeitenCharging Station For E-Vehicle Using Solar With IOTjakeNoch keine Bewertungen
- S P 01958 Version 2 EPD OVO ArmchairDokument16 SeitenS P 01958 Version 2 EPD OVO ArmchairboiNoch keine Bewertungen
- Veerasaiva Pantha in 12th Century MaharashtraDokument2 SeitenVeerasaiva Pantha in 12th Century MaharashtrarathkiraniNoch keine Bewertungen
- The Big M Method: Group BDokument7 SeitenThe Big M Method: Group BWoo Jin YoungNoch keine Bewertungen
- Firststep To AlaskaDokument28 SeitenFirststep To AlaskaBarbara NelsonNoch keine Bewertungen