Das könnte Ihnen auch gefallen
- NuMeths (Unit1)Dokument34 SeitenNuMeths (Unit1)kathrin_jazz26Noch keine Bewertungen
- Highway Design ReportDokument27 SeitenHighway Design ReportBrendan Johns100% (1)
- MITOCW - MITRES2 - 002s10linear - Lec02 - 300k-mp4: ProfessorDokument21 SeitenMITOCW - MITRES2 - 002s10linear - Lec02 - 300k-mp4: ProfessorDanielNoch keine Bewertungen
- Modal Analysis GerritvisserDokument11 SeitenModal Analysis GerritvisserSathiyaseelan SubramaniNoch keine Bewertungen
- MITOCW - MITRES2 - 002s10nonlinear - Lec12 - 300k-mp4: NarratorDokument16 SeitenMITOCW - MITRES2 - 002s10nonlinear - Lec12 - 300k-mp4: NarratorBastian DewiNoch keine Bewertungen
- Harmonic Oscillator II: Damped OscillatorDokument12 SeitenHarmonic Oscillator II: Damped Oscillatorpusa123Noch keine Bewertungen
- 124 - Section 1.2Dokument41 Seiten124 - Section 1.2Aesthetic DukeNoch keine Bewertungen
- MITOCW - MITRES2 - 002s10linear - Lec12 - 300k-mp4: ProfessorDokument21 SeitenMITOCW - MITRES2 - 002s10linear - Lec12 - 300k-mp4: ProfessorDanielNoch keine Bewertungen
- Lec 14Dokument13 SeitenLec 14Janaki RamanNoch keine Bewertungen
- Conservative Vector FieldsDokument9 SeitenConservative Vector FieldsChernet TugeNoch keine Bewertungen
- Solving Quadratic Equations Using Extracting The Square RootsDokument12 SeitenSolving Quadratic Equations Using Extracting The Square Rootsjeidre pamorcaNoch keine Bewertungen
- NPTEL FEM Lec4Dokument35 SeitenNPTEL FEM Lec4EliNoch keine Bewertungen
- (Massachusetts Institute of Technology: Mit Opencourseware)Dokument11 Seiten(Massachusetts Institute of Technology: Mit Opencourseware)Igor CamposNoch keine Bewertungen
- Lec 6Dokument20 SeitenLec 6ዘረአዳም ዘመንቆረርNoch keine Bewertungen
- MITOCW - MITRES2 - 002s10nonlinear - Lec11 - 300k-mp4: ProfessorDokument15 SeitenMITOCW - MITRES2 - 002s10nonlinear - Lec11 - 300k-mp4: ProfessorBastian DewiNoch keine Bewertungen
- Advanced Mathematics - Chapter 2Dokument22 SeitenAdvanced Mathematics - Chapter 2cherrrryNoch keine Bewertungen
- Fig. 2 Spring-Mass System Shock AbsorberDokument3 SeitenFig. 2 Spring-Mass System Shock AbsorberAlberth AvilaNoch keine Bewertungen
- Preface: Calculus IIDokument12 SeitenPreface: Calculus IIBobNoch keine Bewertungen
- Lec 15Dokument18 SeitenLec 15Janaki RamanNoch keine Bewertungen
- Systems of Linear EquationsDokument19 SeitenSystems of Linear EquationsAZAIIINoch keine Bewertungen
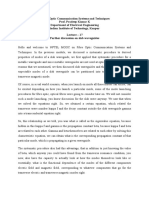
- Computational Fluid Dynamics Prof. Dr. Suman Chakraborty Department of Mechanical Engineering Indian Institute of Technology, KharagpurDokument18 SeitenComputational Fluid Dynamics Prof. Dr. Suman Chakraborty Department of Mechanical Engineering Indian Institute of Technology, KharagpurRanganathan .kNoch keine Bewertungen
- 3 Lec3Dokument18 Seiten3 Lec3Shahzaib Anwar OffNoch keine Bewertungen
- MITOCW - MITRES2 - 002s10linear - Lec05 - 300k-mp4: ProfessorDokument20 SeitenMITOCW - MITRES2 - 002s10linear - Lec05 - 300k-mp4: ProfessorDanielNoch keine Bewertungen
- Number TheoryDokument85 SeitenNumber TheoryArjunRanaNoch keine Bewertungen
- Gaussian EliminationDokument22 SeitenGaussian Eliminationnefoxy100% (1)
- Lec14 PDFDokument21 SeitenLec14 PDFAbhishek AroraNoch keine Bewertungen
- (Massachusetts Institute of Technology: Mit Opencourseware)Dokument9 Seiten(Massachusetts Institute of Technology: Mit Opencourseware)Igor CamposNoch keine Bewertungen
- Olevel Additional Mathematics Revision Notes by Fahmeed RajputDokument37 SeitenOlevel Additional Mathematics Revision Notes by Fahmeed RajputTanishq Desai IX100% (1)
- Aero Elasticity Prof. C.V. Venkatesan Department of Aerospace Engineering Indian Institute of Technology, Kanpur Lecture - 3Dokument26 SeitenAero Elasticity Prof. C.V. Venkatesan Department of Aerospace Engineering Indian Institute of Technology, Kanpur Lecture - 3Sayan PalNoch keine Bewertungen
- Lec 17Dokument13 SeitenLec 17vishnu anilNoch keine Bewertungen
- Week4 Soluciones ArnoldDokument6 SeitenWeek4 Soluciones ArnoldDiana UrizaNoch keine Bewertungen
- Theoretical Mechanics Prof. Charudatt Kadolkar Department of Physics Indian Institute of Technology-Guwahati Lecture - 04 D'Alembert's PrincipleDokument12 SeitenTheoretical Mechanics Prof. Charudatt Kadolkar Department of Physics Indian Institute of Technology-Guwahati Lecture - 04 D'Alembert's PrincipleHow to do anything By HimanshuNoch keine Bewertungen
- "Newton's Method and Loops": University of Karbala College of Engineering Petroleum Eng. DepDokument11 Seiten"Newton's Method and Loops": University of Karbala College of Engineering Petroleum Eng. DepAli MahmoudNoch keine Bewertungen
- Practice Problems Assignment Problems: Volumes of Solids of Revolution / Method of CylindersDokument8 SeitenPractice Problems Assignment Problems: Volumes of Solids of Revolution / Method of CylindersMuhafeez GoolabNoch keine Bewertungen
- Projectile Motion ProblemsDokument7 SeitenProjectile Motion Problemsomar_oj_4Noch keine Bewertungen
- MITOCW - MITRES2 - 002s10linear - Lec10 - 300k-mp4: ProfessorDokument21 SeitenMITOCW - MITRES2 - 002s10linear - Lec10 - 300k-mp4: ProfessorDanielNoch keine Bewertungen
- Dynamics and Vibrations - Notes - Multi-DOF VibrationsDokument9 SeitenDynamics and Vibrations - Notes - Multi-DOF VibrationsgheinbaNoch keine Bewertungen
- Differential EquationsDokument11 SeitenDifferential Equationsjustine salandananNoch keine Bewertungen
- NPTEL FEM Lec2Dokument30 SeitenNPTEL FEM Lec2EliNoch keine Bewertungen
- Algebra - Equations Reducible To Quadratic in Form PDFDokument6 SeitenAlgebra - Equations Reducible To Quadratic in Form PDFThesis Group- Coronado Reyes Zapata UST ChENoch keine Bewertungen
- QdbkvD4N UsDokument17 SeitenQdbkvD4N UsTheoNoch keine Bewertungen
- Linear Algebra and MatricesDokument181 SeitenLinear Algebra and MatricesLennon AcostaNoch keine Bewertungen
- Untitled Document - Edited - 2022-07-16T015828.560Dokument5 SeitenUntitled Document - Edited - 2022-07-16T015828.560Moses WabunaNoch keine Bewertungen
- CFD LES Multigrid Notes pdf-3Dokument37 SeitenCFD LES Multigrid Notes pdf-3RAJ GAURAVNoch keine Bewertungen
- Ece 2300 Homework SolutionsDokument6 SeitenEce 2300 Homework Solutionsacfhfnapd100% (1)
- Chapter 2 Equations and InequalitiesDokument5 SeitenChapter 2 Equations and InequalitiesLeonessa CortesNoch keine Bewertungen
- Lec 52Dokument26 SeitenLec 52Ganthimathi VNoch keine Bewertungen
- Partial Fraction ExpansionDokument2 SeitenPartial Fraction ExpansionMarco GallardoNoch keine Bewertungen
- Calculus I - Related RatesDokument15 SeitenCalculus I - Related Rateswag2325Noch keine Bewertungen
- Chapter 6. Power Flow Analysis: First The Generators Are Replaced by EquivalentDokument8 SeitenChapter 6. Power Flow Analysis: First The Generators Are Replaced by EquivalentpfumoreropaNoch keine Bewertungen
- V P-O RQqmeg 4Dokument18 SeitenV P-O RQqmeg 4Bild LucaNoch keine Bewertungen
- Computational Fluid Dynamics Dr. Krishna M. Singh Department of Mechanical and Industrial Engineering Indian Institute of Technology - Roorkee Lecture - 28 Introduction To Finite Volume MethodDokument25 SeitenComputational Fluid Dynamics Dr. Krishna M. Singh Department of Mechanical and Industrial Engineering Indian Institute of Technology - Roorkee Lecture - 28 Introduction To Finite Volume MethodMandip DhadukNoch keine Bewertungen
- 07 09 P6-EnDokument4 Seiten07 09 P6-EnBenNoch keine Bewertungen
- Introduction To Finite Element Method Dr. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 14Dokument21 SeitenIntroduction To Finite Element Method Dr. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 14mahendranNoch keine Bewertungen
- MITOCW - MITRES2 - 002s10linear - Lec11 - 300k-mp4: ProfessorDokument18 SeitenMITOCW - MITRES2 - 002s10linear - Lec11 - 300k-mp4: ProfessorDanielNoch keine Bewertungen
- Systems of Linear EquationsDokument54 SeitenSystems of Linear EquationsOlha SharapovaNoch keine Bewertungen
- Gaussian Elimination..14Dokument12 SeitenGaussian Elimination..14Saif TaureanNoch keine Bewertungen
- MITOCW - 4. Movement of A Particle in Circular Motion W/ Polar CoordinatesDokument18 SeitenMITOCW - 4. Movement of A Particle in Circular Motion W/ Polar CoordinatesRogerioNoch keine Bewertungen
- Free Damped VibrationsDokument7 SeitenFree Damped VibrationsYob YnnosNoch keine Bewertungen
- Micromachines 11 00881 v2Dokument15 SeitenMicromachines 11 00881 v2DanielNoch keine Bewertungen
- Stand LibDokument560 SeitenStand LibDanielNoch keine Bewertungen
- S5403 Nelson InoueDokument36 SeitenS5403 Nelson InoueDanielNoch keine Bewertungen
- Application of Machine Learning Algorithms To Flow Modeling and OptimizationDokument10 SeitenApplication of Machine Learning Algorithms To Flow Modeling and OptimizationDanielNoch keine Bewertungen
- Modern CPP Tutorial en UsDokument89 SeitenModern CPP Tutorial en UsDanielNoch keine Bewertungen
- Xin-She Yang: EditorialDokument3 SeitenXin-She Yang: EditorialDanielNoch keine Bewertungen
- CPP v1.2Dokument485 SeitenCPP v1.2DanielNoch keine Bewertungen
- 22 CLJ End Act 1 - Keyboard 1Dokument2 Seiten22 CLJ End Act 1 - Keyboard 1DanielNoch keine Bewertungen
- 19 Glory To God - Keyboard 1Dokument2 Seiten19 Glory To God - Keyboard 1DanielNoch keine Bewertungen
- 37 CLJ Finale - Keyboard 1Dokument3 Seiten37 CLJ Finale - Keyboard 1DanielNoch keine Bewertungen
- 22.5 Act 2 Title Page - Keyboard 1Dokument1 Seite22.5 Act 2 Title Page - Keyboard 1DanielNoch keine Bewertungen
- Pebl 2 ManualDokument306 SeitenPebl 2 ManualEstebanGiraNoch keine Bewertungen
- Effect of Type and Concentration of Different Water Soluble Polymer Solutions On Rheological PropertiesDokument13 SeitenEffect of Type and Concentration of Different Water Soluble Polymer Solutions On Rheological PropertiesMadhukar ScribdNoch keine Bewertungen
- Steel: Statistical Analysis of Steel FormabilityDokument12 SeitenSteel: Statistical Analysis of Steel FormabilitynadhabindhuNoch keine Bewertungen
- Electricity, Magnetism and Modern PhysicsDokument12 SeitenElectricity, Magnetism and Modern Physicsxtor787898Noch keine Bewertungen
- The Essentials of Machine Learning in Finance and AccountingDokument259 SeitenThe Essentials of Machine Learning in Finance and Accountingernestdark11100% (1)
- ACI 549R-97: Reported by ACI Committee 549Dokument26 SeitenACI 549R-97: Reported by ACI Committee 549curlyjockeyNoch keine Bewertungen
- NMDokument12 SeitenNMShravan KumarNoch keine Bewertungen
- PTM Phy F.4.Ch.2.4Dokument13 SeitenPTM Phy F.4.Ch.2.4Bazil BoliaNoch keine Bewertungen
- 07 - Ncert Solutions Jan27 For Class 8 Maths Chapter 14 PDFDokument22 Seiten07 - Ncert Solutions Jan27 For Class 8 Maths Chapter 14 PDFAnil KumarNoch keine Bewertungen
- Ultrasonic Testing-Includes Shear Wave PDFDokument36 SeitenUltrasonic Testing-Includes Shear Wave PDFcutefrenzyNoch keine Bewertungen
- MMW Chapter 3Dokument82 SeitenMMW Chapter 3Marjorie MalvedaNoch keine Bewertungen
- PMP Cheat SheetDokument9 SeitenPMP Cheat SheetzepededudaNoch keine Bewertungen
- Review SessionDokument52 SeitenReview SessionEskat Torres FaderonNoch keine Bewertungen
- Playing With Blends in CoreldrawDokument12 SeitenPlaying With Blends in CoreldrawZubairNoch keine Bewertungen
- Shaft Alignment Guide - E-Jan05Dokument21 SeitenShaft Alignment Guide - E-Jan05Brian FreemanNoch keine Bewertungen
- Inductive and Deductive ReasoningDokument37 SeitenInductive and Deductive ReasoningGadela KevinNoch keine Bewertungen
- Types of Relation 1Dokument17 SeitenTypes of Relation 1Justin Adrian BautistaNoch keine Bewertungen
- MA2401 Lecture NotesDokument270 SeitenMA2401 Lecture NotesJojo LomoNoch keine Bewertungen
- Compulsory Part Paper 2 Question No. Key Question No. KeyDokument10 SeitenCompulsory Part Paper 2 Question No. Key Question No. KeyJOSEPHINENoch keine Bewertungen
- Design of Passenger Aerial Ropeway For Urban EnvirDokument13 SeitenDesign of Passenger Aerial Ropeway For Urban EnvirmaniNoch keine Bewertungen
- The Pavement Performance Modeling: Deterministic Vs Stochastic ApproachesDokument19 SeitenThe Pavement Performance Modeling: Deterministic Vs Stochastic ApproachesmarziyehNoch keine Bewertungen
- Computational Intelligence (CS3030/CS3031) : School of Computer Engineering, KIIT-DU, BBS-24, IndiaDokument2 SeitenComputational Intelligence (CS3030/CS3031) : School of Computer Engineering, KIIT-DU, BBS-24, IndiaRaju KumarNoch keine Bewertungen
- FreeRTOS - TasksDokument31 SeitenFreeRTOS - TasksMani Kandan KNoch keine Bewertungen
- Ma8251 Unit I Matrices v1Dokument124 SeitenMa8251 Unit I Matrices v1Kousheek VinnakotiNoch keine Bewertungen
- Strategies For Administrative Reform: Yehezkel DrorDokument17 SeitenStrategies For Administrative Reform: Yehezkel DrorNahidul IslamNoch keine Bewertungen
- Prediction of Fatigue Failure in A Camshaft Using The Crack MethodDokument9 SeitenPrediction of Fatigue Failure in A Camshaft Using The Crack MethodDiego PovedaNoch keine Bewertungen
- Climate WorkbookDokument119 SeitenClimate WorkbookreaderdarkeyeNoch keine Bewertungen
- Unit 1 Essay QuestionsDokument2 SeitenUnit 1 Essay QuestionsTharun kondaNoch keine Bewertungen
- Richardson 2007Dokument20 SeitenRichardson 2007Badri VrsnprasadNoch keine Bewertungen