Das könnte Ihnen auch gefallen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Circuit SymbolsDokument2 SeitenCircuit SymbolsAhnis ZulkarnainNoch keine Bewertungen
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- Modeling: Hybrid Systems: Arijit MondalDokument20 SeitenModeling: Hybrid Systems: Arijit MondalutpalNoch keine Bewertungen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Edoc - Pub EdtgdDokument262 SeitenEdoc - Pub EdtgdutpalNoch keine Bewertungen
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
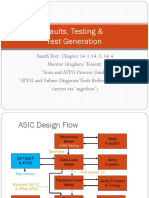
- Faults, Testing & Test GenerationDokument34 SeitenFaults, Testing & Test GenerationutpalNoch keine Bewertungen
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- A List of ExperimentDokument1 SeiteA List of ExperimentutpalNoch keine Bewertungen
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Bansal Classes Mathematics Study Material For IIT JEEDokument499 SeitenBansal Classes Mathematics Study Material For IIT JEENiraj Kr Tulsyan81% (16)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- CH 06Dokument83 SeitenCH 06anjugaduNoch keine Bewertungen
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- 03 Discrete Systems PDFDokument41 Seiten03 Discrete Systems PDFutpalNoch keine Bewertungen
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- 04 Inverter 6up PDFDokument11 Seiten04 Inverter 6up PDFutpalNoch keine Bewertungen
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- 2017 (M.S.) PDFDokument2 Seiten2017 (M.S.) PDFutpalNoch keine Bewertungen
- 04 Inverter 6up PDFDokument11 Seiten04 Inverter 6up PDFutpalNoch keine Bewertungen
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Modeling: Continuous Systems: Arijit MondalDokument41 SeitenModeling: Continuous Systems: Arijit MondalutpalNoch keine Bewertungen
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- Digital Ic ListDokument24 SeitenDigital Ic ListCosmin PavelNoch keine Bewertungen
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Made Easy Postal ESE SyllabusDokument3 SeitenMade Easy Postal ESE SyllabusutpalNoch keine Bewertungen
- Sinusoidal Steady-State - Frequency Response - Bode PlotsDokument34 SeitenSinusoidal Steady-State - Frequency Response - Bode PlotsMemphis MemphisianNoch keine Bewertungen
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- TSC 4800a PDFDokument6 SeitenTSC 4800a PDFutpalNoch keine Bewertungen
- EC Gate 2016 SET 3 PDFDokument17 SeitenEC Gate 2016 SET 3 PDFutpalNoch keine Bewertungen
- Practical Applications of Bernoulli's EquationDokument12 SeitenPractical Applications of Bernoulli's EquationAnkur Yash100% (1)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- Practical Applications of Bernoulli's EquationDokument12 SeitenPractical Applications of Bernoulli's EquationAnkur Yash100% (1)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Indian Institute of Technology Patna Course Add/Drop Form Autumn/ Spring Semester 20 - 20Dokument1 SeiteIndian Institute of Technology Patna Course Add/Drop Form Autumn/ Spring Semester 20 - 20utpalNoch keine Bewertungen
- Indian Institute of Technology Patna JULY 2018 M.Tech. Fee Structure For First SemesterDokument9 SeitenIndian Institute of Technology Patna JULY 2018 M.Tech. Fee Structure For First SemesterutpalNoch keine Bewertungen
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Indian Institute of Technology Patna Course Add/Drop Form Autumn/ Spring Semester 20 - 20Dokument1 SeiteIndian Institute of Technology Patna Course Add/Drop Form Autumn/ Spring Semester 20 - 20utpalNoch keine Bewertungen
- Bode PlotsDokument8 SeitenBode Plotsselaroth168Noch keine Bewertungen
- GATE ECE 1999 Actual PaperDokument17 SeitenGATE ECE 1999 Actual Paperkibrom atsbhaNoch keine Bewertungen
- Section 1: Engineering MathematicsDokument2 SeitenSection 1: Engineering MathematicsSunil GiriNoch keine Bewertungen
- Scanned by CamscannerDokument34 SeitenScanned by CamscannerutpalNoch keine Bewertungen
- Ticket - Abibus PDFDokument1 SeiteTicket - Abibus PDFJosephNoch keine Bewertungen
- Module 2 - Part 2Dokument85 SeitenModule 2 - Part 2Tanvi DeoreNoch keine Bewertungen
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Efqm Success-Story-Book LRDokument34 SeitenEfqm Success-Story-Book LRabdelmutalabNoch keine Bewertungen
- QuaverEd Lesson Plan 6-7Dokument10 SeitenQuaverEd Lesson Plan 6-7zgyleopardNoch keine Bewertungen
- Encryption LessonDokument2 SeitenEncryption LessonKelly LougheedNoch keine Bewertungen
- Statistics For Absolute Beginners (Second Edition) (Oliver TheobaldDokument144 SeitenStatistics For Absolute Beginners (Second Edition) (Oliver Theobaldcispas2000Noch keine Bewertungen
- 40th Caterpillar Performance HandbookDokument372 Seiten40th Caterpillar Performance Handbookcarlos_córdova_8100% (11)
- Linux Memory ExplainedDokument60 SeitenLinux Memory ExplainedRaphael AraujoNoch keine Bewertungen
- Materials Science and Engineering ADokument10 SeitenMaterials Science and Engineering Akhudhayer1970Noch keine Bewertungen
- 1st Activity in EthicsDokument2 Seiten1st Activity in EthicsAleiah Jane Valencia AlverioNoch keine Bewertungen
- VMware SD WAN Google Cloud Platform Virtual Edge Deployment GuideDokument24 SeitenVMware SD WAN Google Cloud Platform Virtual Edge Deployment GuideJuan RojasNoch keine Bewertungen
- R R O S A: Model Rf-It Model Ce-It Insulator TestersDokument2 SeitenR R O S A: Model Rf-It Model Ce-It Insulator Testersvictor raul sandoval martinezNoch keine Bewertungen
- 0 - Resume - Preity Thadani PDFDokument3 Seiten0 - Resume - Preity Thadani PDFClash ClashhNoch keine Bewertungen
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- 110Q Pump Catalog SheetDokument2 Seiten110Q Pump Catalog SheetJohnNoch keine Bewertungen
- Calculation of Work IndexDokument5 SeitenCalculation of Work IndexEnryan Oreski RiyadiNoch keine Bewertungen
- Cics Tutorial PDFDokument23 SeitenCics Tutorial PDFNeelay KumarNoch keine Bewertungen
- Silverio Nuanez Verified ComplaintDokument10 SeitenSilverio Nuanez Verified ComplaintMichael_Lee_RobertsNoch keine Bewertungen
- JDCF-66 220 VTDokument13 SeitenJDCF-66 220 VTHusein OkhonovNoch keine Bewertungen
- NEBOSH IGC IG1 Course NotesDokument165 SeitenNEBOSH IGC IG1 Course NotesShagufta Mallick100% (13)
- COO Direct Response Marketing in Miami FL Resume Mark TaylorDokument2 SeitenCOO Direct Response Marketing in Miami FL Resume Mark TaylorMarkTaylor1Noch keine Bewertungen
- Research and Practice in HRM - Sept 8Dokument9 SeitenResearch and Practice in HRM - Sept 8drankitamayekarNoch keine Bewertungen
- New Champlain Bridge: Final Report Summary (English)Dokument82 SeitenNew Champlain Bridge: Final Report Summary (English)andyrigaNoch keine Bewertungen
- Sop ECUDokument5 SeitenSop ECUSumaira CheemaNoch keine Bewertungen
- Heist Story ScriptDokument3 SeitenHeist Story Scriptapi-525637110Noch keine Bewertungen
- Cover LetterDokument2 SeitenCover LetterSasi Gangadhar BNoch keine Bewertungen
- Istqb Agile Tester Learning Objectives SingleDokument3 SeitenIstqb Agile Tester Learning Objectives SingleSundarNoch keine Bewertungen
- DocumentDokument2 SeitenDocumentAddieNoch keine Bewertungen
- Pas 16 - Property Plant and EquipmentDokument4 SeitenPas 16 - Property Plant and EquipmentJessie ForpublicuseNoch keine Bewertungen
- SIFI-131 Fire Protection in Electrical Equipment RoomsDokument8 SeitenSIFI-131 Fire Protection in Electrical Equipment RoomsemiljanlazeNoch keine Bewertungen
- Unit 13 Developing, Using, and Organizing Resources in A Specialist AreaDokument21 SeitenUnit 13 Developing, Using, and Organizing Resources in A Specialist AreaKan SonNoch keine Bewertungen
- INCOSE Systems Engineering Handbook: A Guide for System Life Cycle Processes and ActivitiesVon EverandINCOSE Systems Engineering Handbook: A Guide for System Life Cycle Processes and ActivitiesBewertung: 5 von 5 Sternen5/5 (1)
- Electronics All-in-One For Dummies, 3rd EditionVon EverandElectronics All-in-One For Dummies, 3rd EditionBewertung: 5 von 5 Sternen5/5 (2)
- Digital Filmmaking: The Ultimate Guide to Web Video Production for Beginners and Non-Professionals, Learn Useful Tips and Advice on How You Can Create, Film and Edit Your VideosVon EverandDigital Filmmaking: The Ultimate Guide to Web Video Production for Beginners and Non-Professionals, Learn Useful Tips and Advice on How You Can Create, Film and Edit Your VideosBewertung: 5 von 5 Sternen5/5 (1)
- Hacking Electronics: An Illustrated DIY Guide for Makers and HobbyistsVon EverandHacking Electronics: An Illustrated DIY Guide for Makers and HobbyistsBewertung: 3.5 von 5 Sternen3.5/5 (2)
- Practical Electrical Wiring: Residential, Farm, Commercial, and IndustrialVon EverandPractical Electrical Wiring: Residential, Farm, Commercial, and IndustrialBewertung: 3.5 von 5 Sternen3.5/5 (3)