Das könnte Ihnen auch gefallen
- Fuzzy Logic Controller For AirconDokument8 SeitenFuzzy Logic Controller For AirconEvan SumidoNoch keine Bewertungen
- Tuning Equations For Cascaded Control Systems Based On The First Order Plus Dead Time ApproachDokument10 SeitenTuning Equations For Cascaded Control Systems Based On The First Order Plus Dead Time ApproachMaria DelgadoNoch keine Bewertungen
- Multiple Fuzzy Model-Based Temperature Predictive Control For HVAC SystemsDokument20 SeitenMultiple Fuzzy Model-Based Temperature Predictive Control For HVAC SystemspedroyprNoch keine Bewertungen
- Controlling Heat Exchanger Temp with PID and Fuzzy LogicDokument5 SeitenControlling Heat Exchanger Temp with PID and Fuzzy LogicEric DiazNoch keine Bewertungen
- JCIT3528PPLDokument8 SeitenJCIT3528PPLgajendra2010Noch keine Bewertungen
- Bytronic SistemDokument6 SeitenBytronic SistemSedat IriçNoch keine Bewertungen
- A125703 288 PDFDokument7 SeitenA125703 288 PDFTimothy FieldsNoch keine Bewertungen
- Nazaruddin2008 PDFDokument4 SeitenNazaruddin2008 PDFelva RfNoch keine Bewertungen
- Heat Exchanger ExampleDokument7 SeitenHeat Exchanger ExampleBrian MasonNoch keine Bewertungen
- Identification and Optimization of Pi Parameters Based On Genetic Algorithm For Non Linear System Using MatlabDokument51 SeitenIdentification and Optimization of Pi Parameters Based On Genetic Algorithm For Non Linear System Using Matlabjagateesan50% (2)
- Performance Assessment of A Radiant Tube Furnace's Control SystemDokument5 SeitenPerformance Assessment of A Radiant Tube Furnace's Control SystemFabián José Manrique MorelosNoch keine Bewertungen
- SBHS1Dokument5 SeitenSBHS1Rahul PancholiNoch keine Bewertungen
- Important On SdarticleDokument15 SeitenImportant On Sdarticleveeresh1000Noch keine Bewertungen
- SYSTEM OPTIMISATION: MPC vs PI ControlDokument7 SeitenSYSTEM OPTIMISATION: MPC vs PI ControlAlberto Fonseca UribeNoch keine Bewertungen
- Control Loop HardwareDokument56 SeitenControl Loop Hardwarecharleselitb92Noch keine Bewertungen
- Implementation of Matlab-SIMULINK Based Real Time Temperature Control For Set Point ChangesDokument8 SeitenImplementation of Matlab-SIMULINK Based Real Time Temperature Control For Set Point ChangesIngole DeepakNoch keine Bewertungen
- State Space Model Predictive Control of An Aerothermic Process With Actuators ConstraintsDokument9 SeitenState Space Model Predictive Control of An Aerothermic Process With Actuators ConstraintsSamantha BrownNoch keine Bewertungen
- Design of Fuzzy Logic Controller For A Cross Flow Shell and Tube Heat-ExchangerDokument3 SeitenDesign of Fuzzy Logic Controller For A Cross Flow Shell and Tube Heat-ExchangerSmilyAkankshaNoch keine Bewertungen
- O.dyer PIDDokument205 SeitenO.dyer PIDHemaNoch keine Bewertungen
- PID Temperature ControlDokument5 SeitenPID Temperature ControlMark Anthony CaroNoch keine Bewertungen
- Robust Iterative Learning Control of An Exothermic Semi-Batch Chemical ReactorDokument19 SeitenRobust Iterative Learning Control of An Exothermic Semi-Batch Chemical ReactorFCNoch keine Bewertungen
- Pid Feedforward ControllerDokument6 SeitenPid Feedforward ControllermitudevilNoch keine Bewertungen
- Widya Sekar A - 194308038 - Laporan 2Dokument39 SeitenWidya Sekar A - 194308038 - Laporan 2Agung KrisnaNoch keine Bewertungen
- Non-Linear Constrained MPC: Real-Time Implementation of Greenhouse Air Temperature ControlDokument12 SeitenNon-Linear Constrained MPC: Real-Time Implementation of Greenhouse Air Temperature ControlenggsabiNoch keine Bewertungen
- Microcontroller Based Intelligent Temperature Controller For GreenhouseDokument5 SeitenMicrocontroller Based Intelligent Temperature Controller For GreenhouseresearchinventyNoch keine Bewertungen
- Journal of Electrical Engineering & Technology (JEET) : ©iaemeDokument8 SeitenJournal of Electrical Engineering & Technology (JEET) : ©iaemeIAEME PublicationNoch keine Bewertungen
- Report 2 (PID)Dokument5 SeitenReport 2 (PID)Araragi KoyomiNoch keine Bewertungen
- Design of Internal Model Controller For A Heat Exchanger SystemDokument5 SeitenDesign of Internal Model Controller For A Heat Exchanger SystemAnonymous mIRrZKXNoch keine Bewertungen
- To DC sJBJirDokument11 SeitenTo DC sJBJirprakashNoch keine Bewertungen
- Backstepping Control of Wind TunnelDokument10 SeitenBackstepping Control of Wind TunnellamuelNoch keine Bewertungen
- Proposal of A Fuzzy Control System For Heat Transfer Using PLCDokument10 SeitenProposal of A Fuzzy Control System For Heat Transfer Using PLCEdú CárdenasNoch keine Bewertungen
- Digital Adaptive Control System Design For A Particular Class of Hydraulic SystemsDokument10 SeitenDigital Adaptive Control System Design For A Particular Class of Hydraulic SystemsVignesh RamakrishnanNoch keine Bewertungen
- RIDWAN'S COMPLETE PROJECT (CHPT 1-5) - CorrectedDokument22 SeitenRIDWAN'S COMPLETE PROJECT (CHPT 1-5) - CorrectedRidwanNoch keine Bewertungen
- Rule-Based Fault Detection Method For Air Handling UnitsDokument8 SeitenRule-Based Fault Detection Method For Air Handling UnitsLiping WangNoch keine Bewertungen
- BMS Sequence of OperationDokument2 SeitenBMS Sequence of OperationRaja AntonyNoch keine Bewertungen
- PI and PID Controller Tuning Rules For Time Delay ProcessesDokument205 SeitenPI and PID Controller Tuning Rules For Time Delay ProcessesArif RochmanNoch keine Bewertungen
- Design & Simulation of Electro-Pneumatic SystemDokument54 SeitenDesign & Simulation of Electro-Pneumatic SystemSaravanan Mathi0% (2)
- Exp 5 PID Controller Tuning On A Real Time Temperature Control System.Dokument5 SeitenExp 5 PID Controller Tuning On A Real Time Temperature Control System.Hardik AgravattNoch keine Bewertungen
- Design and Tuning of a Ratio Controller Using PI Controllers and Blend StationDokument13 SeitenDesign and Tuning of a Ratio Controller Using PI Controllers and Blend StationShyam SundarNoch keine Bewertungen
- Chapter 12Dokument44 SeitenChapter 12Esteban RojasNoch keine Bewertungen
- Matlab simulation of temperature control using PID and FLCDokument5 SeitenMatlab simulation of temperature control using PID and FLCwsa wsaNoch keine Bewertungen
- Se201 (A4)Dokument4 SeitenSe201 (A4)Mehran Rasheed GorayaNoch keine Bewertungen
- 5.4 Response of Second-Order ProcessesDokument11 Seiten5.4 Response of Second-Order ProcessesTaban ShahabNoch keine Bewertungen
- Unit IDokument7 SeitenUnit IanandhNoch keine Bewertungen
- Ambo university MENG 5272 chapter on linear systemsDokument20 SeitenAmbo university MENG 5272 chapter on linear systemsFikadu EshetuNoch keine Bewertungen
- PID Control Implementation in Multiple Input and Multiple Output (MIMO) Water Mixing Tank Via Ziegler-Nichols and Direct Synthesis MethodsDokument5 SeitenPID Control Implementation in Multiple Input and Multiple Output (MIMO) Water Mixing Tank Via Ziegler-Nichols and Direct Synthesis MethodsbijejournalNoch keine Bewertungen
- Understanding PID Control Using a Process Control UnitDokument11 SeitenUnderstanding PID Control Using a Process Control Unittk_atiqahNoch keine Bewertungen
- Instrumentation & Process ControlDokument6 SeitenInstrumentation & Process ControlAnonymous 0zrCNQNoch keine Bewertungen
- Introduction To Control: The ProcessDokument7 SeitenIntroduction To Control: The ProcessshajiNoch keine Bewertungen
- Experiment 06: Study of Process Control-I: Mesbah Ahmad Lecturer Department of Chemical Engineering, BUETDokument18 SeitenExperiment 06: Study of Process Control-I: Mesbah Ahmad Lecturer Department of Chemical Engineering, BUETMd Abid AfridiNoch keine Bewertungen
- Dynamic Simulation of Heat Transfer Through Cooling TowerDokument5 SeitenDynamic Simulation of Heat Transfer Through Cooling TowerAparnaNoch keine Bewertungen
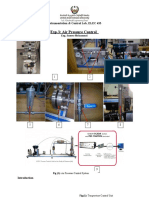
- Exp3 - Air Pressure ControlDokument8 SeitenExp3 - Air Pressure ControlDon LawrenceNoch keine Bewertungen
- Simplified Modeling of Clinker Cooling Based On Long Term Industrial DataDokument5 SeitenSimplified Modeling of Clinker Cooling Based On Long Term Industrial Data1977julNoch keine Bewertungen
- IMC Based Automatic Tuning Method For PID Controllers in A Smith Predictor ConfigurationDokument10 SeitenIMC Based Automatic Tuning Method For PID Controllers in A Smith Predictor ConfigurationAnonymous WkbmWCa8MNoch keine Bewertungen
- Unesco - Eolss Sample Chapters: Controller Design in Time-DomainDokument9 SeitenUnesco - Eolss Sample Chapters: Controller Design in Time-DomainAnonymous EPSHB9tXZNoch keine Bewertungen
- 2003 - Discretization Method DC MotorDokument4 Seiten2003 - Discretization Method DC MotorTheodoroFirmoNoch keine Bewertungen
- Lab2 UpdatedDokument5 SeitenLab2 UpdatedSekar PrasetyaNoch keine Bewertungen
- Simulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorVon EverandSimulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorNoch keine Bewertungen
- Ejemplos de La Funcion Ident de MatlabDokument1 SeiteEjemplos de La Funcion Ident de MatlabwendyNoch keine Bewertungen
- Applied Thermal Engineering: T.S. Ge, F. Ziegler, R.Z. WangDokument11 SeitenApplied Thermal Engineering: T.S. Ge, F. Ziegler, R.Z. WangwendyNoch keine Bewertungen
- Rotary Heat Exchanger Energy Recovery Ventilation SpecialistDokument16 SeitenRotary Heat Exchanger Energy Recovery Ventilation SpecialistwendyNoch keine Bewertungen
- Applied Thermal Engineering: Leonardo C. Schurt, Christian J.L. Hermes, Alexandre Tro Fino NetoDokument9 SeitenApplied Thermal Engineering: Leonardo C. Schurt, Christian J.L. Hermes, Alexandre Tro Fino NetowendyNoch keine Bewertungen
- Casillas A07 Ai03Dokument23 SeitenCasillas A07 Ai03wendyNoch keine Bewertungen
- Dynamic Simulation Model of A Vapor Compression Domestic RefrigerDokument7 SeitenDynamic Simulation Model of A Vapor Compression Domestic RefrigercbarajNoch keine Bewertungen
- An advanced nonlinear switched heat exchanger model for vapor compression cycles using the moving-boundary methodDokument12 SeitenAn advanced nonlinear switched heat exchanger model for vapor compression cycles using the moving-boundary methodwendyNoch keine Bewertungen
- Applied Thermal Engineering: Leonardo C. Schurt, Christian J.L. Hermes, Alexandre Tro Fino NetoDokument9 SeitenApplied Thermal Engineering: Leonardo C. Schurt, Christian J.L. Hermes, Alexandre Tro Fino NetowendyNoch keine Bewertungen
- SJ 155Dokument3 SeitenSJ 155wendyNoch keine Bewertungen
- Mini B300 (2767) ManualDokument13 SeitenMini B300 (2767) ManualwendyNoch keine Bewertungen
- Applied Thermal Engineering: Leonardo C. Schurt, Christian J.L. Hermes, Alexandre Tro Fino NetoDokument9 SeitenApplied Thermal Engineering: Leonardo C. Schurt, Christian J.L. Hermes, Alexandre Tro Fino NetowendyNoch keine Bewertungen
- La 2010 PDFDokument18 SeitenLa 2010 PDFwendyNoch keine Bewertungen
- Mini B300 (2767) ManualDokument13 SeitenMini B300 (2767) ManualwendyNoch keine Bewertungen
- Doppler Speed Log DS-80 PDFDokument40 SeitenDoppler Speed Log DS-80 PDFwendyNoch keine Bewertungen
- NT921G Operating ManualDokument50 SeitenNT921G Operating Manualwendy100% (2)
- Ship Security Alert System ConfigurationDokument30 SeitenShip Security Alert System ConfigurationFabio Marcia GrassiNoch keine Bewertungen
- Fluke 1550C 1555 CallibirationManual.Dokument32 SeitenFluke 1550C 1555 CallibirationManual.wendyNoch keine Bewertungen
- Ship Security Alert System ConfigurationDokument30 SeitenShip Security Alert System ConfigurationFabio Marcia GrassiNoch keine Bewertungen
- Beams 3 DDokument104 SeitenBeams 3 DSakisNoch keine Bewertungen
- 2GCS203085A0031-QCap ManualDokument20 Seiten2GCS203085A0031-QCap ManualMario ArellanoNoch keine Bewertungen
- DESIGN CALCULATION FOR 100M3 DIESEL TANKDokument8 SeitenDESIGN CALCULATION FOR 100M3 DIESEL TANKBimal DeyNoch keine Bewertungen
- AMSOIL MCF - Synthetic 10W-40 Motorcycle OilDokument2 SeitenAMSOIL MCF - Synthetic 10W-40 Motorcycle OilamsoildealerNoch keine Bewertungen
- NATEF Engine Performance Job SheetsDokument13 SeitenNATEF Engine Performance Job SheetsAdriRojasNoch keine Bewertungen
- Inventorwizard: Miniature Steam Engine Vertical Steam Engine With Reverse Gear (Anno 1830) Steam Chest 000.010Dokument1 SeiteInventorwizard: Miniature Steam Engine Vertical Steam Engine With Reverse Gear (Anno 1830) Steam Chest 000.010Lucas MaccagnanNoch keine Bewertungen
- Mechanical SectionDokument16 SeitenMechanical SectionFrancis DimeNoch keine Bewertungen
- Computational Fluid Dynamics - Getting Started Quickly With ANSYS CFX 18 Through Simple Examples - Stefan Lecheler - Springer (2023)Dokument211 SeitenComputational Fluid Dynamics - Getting Started Quickly With ANSYS CFX 18 Through Simple Examples - Stefan Lecheler - Springer (2023)Trịnh Thanh Tùng100% (1)
- Assignment 1-ME 272-SolutionDokument9 SeitenAssignment 1-ME 272-SolutionAzooNoch keine Bewertungen
- Boilers, Evaporators, and CondensersDokument852 SeitenBoilers, Evaporators, and CondensersJosé Carlos Chan Arias83% (6)
- Air Refrigeration SystemDokument29 SeitenAir Refrigeration SystemSumit KumarNoch keine Bewertungen
- FSNF ActuatorsDokument4 SeitenFSNF Actuatorssbalan6949Noch keine Bewertungen
- Lecture 1 - IntroductionDokument30 SeitenLecture 1 - IntroductionNguyễn QuốcAnhNoch keine Bewertungen
- Threaded Rod Product Data Sheet Features Strengths MaterialsDokument1 SeiteThreaded Rod Product Data Sheet Features Strengths MaterialsFILID MADNoch keine Bewertungen
- Solar Energy Week 8 Assignment (Due: November 13)Dokument3 SeitenSolar Energy Week 8 Assignment (Due: November 13)batlax0000Noch keine Bewertungen
- Baby Mait PDFDokument2 SeitenBaby Mait PDFChris LuNoch keine Bewertungen
- Centrifugal Pump Definition Components Working Priming Advantages Disadvantages and Applications PDFDokument7 SeitenCentrifugal Pump Definition Components Working Priming Advantages Disadvantages and Applications PDFMuhammad Yasar JavaidNoch keine Bewertungen
- Engg MechanicsDokument284 SeitenEngg Mechanicsmukesh_mlbNoch keine Bewertungen
- Grade Markings For Steel Bolts and ScrewsDokument3 SeitenGrade Markings For Steel Bolts and Screwsrexie2canos8964Noch keine Bewertungen
- UG-6th - Online Class TTDokument6 SeitenUG-6th - Online Class TTFOODIE USNoch keine Bewertungen
- Selection of Materials For Roller Chains From The Perspective of Manufacturing ProcessDokument7 SeitenSelection of Materials For Roller Chains From The Perspective of Manufacturing Processhijzain0% (1)
- ShamrockDokument12 SeitenShamrockFerdinand LizadaNoch keine Bewertungen
- Sarjana Site Visit Schedule-CPPDokument13 SeitenSarjana Site Visit Schedule-CPPSanjay GuptaNoch keine Bewertungen
- Gad 20406510 10 En-00 PDFDokument1 SeiteGad 20406510 10 En-00 PDFErikikoNoch keine Bewertungen
- Pressure Vessel RT TestDokument3 SeitenPressure Vessel RT TestAriq FauzanNoch keine Bewertungen
- Furukawa 1500-EDII - D20II - Engine Starting Circuit X PDFDokument28 SeitenFurukawa 1500-EDII - D20II - Engine Starting Circuit X PDFthomaz100% (3)
- Standard Practice For Direct Design of Buried Precast Concrete Pipe Using Standard InstallDokument51 SeitenStandard Practice For Direct Design of Buried Precast Concrete Pipe Using Standard Installsandeep100% (2)
- Pumping Unit C-640D-305-168Dokument51 SeitenPumping Unit C-640D-305-168EdinsonUribeTorres100% (1)
- MAN L28/32H: Imo Tier Ii Project GuideDokument449 SeitenMAN L28/32H: Imo Tier Ii Project GuideNazikNoch keine Bewertungen
- C4000 Om en 17Dokument91 SeitenC4000 Om en 17David Craig100% (1)