Das könnte Ihnen auch gefallen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
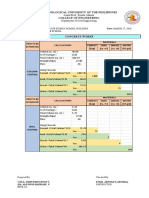
- 2 Concrete Works CompuDokument14 Seiten2 Concrete Works CompuALFONSO RAPHAEL SIANoch keine Bewertungen
- Samsung Gb-19sen Chassis Le19r86bd LCDDokument117 SeitenSamsung Gb-19sen Chassis Le19r86bd LCDAntonio CersosimoNoch keine Bewertungen
- File Upload XSS - Hack 2 LearnDokument12 SeitenFile Upload XSS - Hack 2 LearnTech HelpNoch keine Bewertungen
- OBD-EnET Cable Build - Detailed InstructionsDokument8 SeitenOBD-EnET Cable Build - Detailed InstructionsReza Varamini100% (1)
- 21.1 Mb-4w8x33vb1-01-I3Dokument2 Seiten21.1 Mb-4w8x33vb1-01-I3YarinaNoch keine Bewertungen
- Panduan TimeTrexDokument53 SeitenPanduan TimeTrexAdi Wibowo Yudo Pranoto100% (1)
- Bluetooth Technology SeminarDokument16 SeitenBluetooth Technology SeminarMajestyNoch keine Bewertungen
- FlucsPro Ver 6 - 0 Web Training Notes Rev1Dokument32 SeitenFlucsPro Ver 6 - 0 Web Training Notes Rev1dharshan balajiNoch keine Bewertungen
- M340 and ATV71 Using ModbusTCPIP and Data - Exch FunctionDokument9 SeitenM340 and ATV71 Using ModbusTCPIP and Data - Exch FunctionJose MarcialNoch keine Bewertungen
- Event Specification GuideDokument2 SeitenEvent Specification GuideMarie Toni FondevillaNoch keine Bewertungen
- AnthropometricsDokument5 SeitenAnthropometricsNoel Dela CruzNoch keine Bewertungen
- Instruction Manual: Fundus CameraDokument37 SeitenInstruction Manual: Fundus Camerashakil ahmadNoch keine Bewertungen
- Memorandum Data PrintDokument51 SeitenMemorandum Data PrintGabyyOstosPicon0% (1)
- The A - Z Guide of PythonDokument11 SeitenThe A - Z Guide of PythonSakshi JainNoch keine Bewertungen
- Library Management System Using PHP and MYSQL Database Project ProposalDokument2 SeitenLibrary Management System Using PHP and MYSQL Database Project ProposalRick RanteNoch keine Bewertungen
- LSA Architecure TipsDokument33 SeitenLSA Architecure TipsDavid LewisNoch keine Bewertungen
- Caterpillar 785c 789c Off Highway Trucks Service TrainingDokument20 SeitenCaterpillar 785c 789c Off Highway Trucks Service Trainingjames100% (46)
- 4G-5G - Product CatalogDokument44 Seiten4G-5G - Product CatalogMus ChrifiNoch keine Bewertungen
- 2016 Peugeot 2008 101601 PDFDokument450 Seiten2016 Peugeot 2008 101601 PDFKOSTAS PSYRRASNoch keine Bewertungen
- 6260 p0408 S enDokument3 Seiten6260 p0408 S enDavid BarrosNoch keine Bewertungen
- Company ProfileDokument15 SeitenCompany ProfilerishdugarNoch keine Bewertungen
- OFBS Enrollment Form v.2Dokument2 SeitenOFBS Enrollment Form v.2Abrera ReubenNoch keine Bewertungen
- Day 2Dokument12 SeitenDay 2anamika soodhNoch keine Bewertungen
- Section: NW2060CVB-IV (M) General ArrangementDokument1 SeiteSection: NW2060CVB-IV (M) General Arrangementdarko1969Noch keine Bewertungen
- Different Types of Control Valves - Instrumentation ToolsDokument13 SeitenDifferent Types of Control Valves - Instrumentation Toolsprabhanshu241991Noch keine Bewertungen
- CV WiraDokument3 SeitenCV WiraNi Komang Utari YulianingsihNoch keine Bewertungen
- 3161 Governor: For Control of Engines and Steam TurbinesDokument4 Seiten3161 Governor: For Control of Engines and Steam TurbinesWilliam's SalgadoNoch keine Bewertungen
- Export Import Between SQL TablesDokument5 SeitenExport Import Between SQL TablesSantiago Alcaraz MartinezNoch keine Bewertungen
- Waaree Corporate PPT - V3Dokument53 SeitenWaaree Corporate PPT - V3Bhushan MalsheNoch keine Bewertungen
- DSE335 Operators ManualDokument90 SeitenDSE335 Operators ManualcarlosrmtzNoch keine Bewertungen