Das könnte Ihnen auch gefallen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Factors That Affect The Quality of CommunicationDokument9 SeitenFactors That Affect The Quality of CommunicationWilliam Paras Inte100% (3)
- Punjab Bye Laws For Commercial BuildingsDokument11 SeitenPunjab Bye Laws For Commercial BuildingsAshween ManchandaNoch keine Bewertungen
- Ceramic Materials: Introduction!: MCEN90014: Materials ! ! !dr. K. Xia! ! ! !1!Dokument5 SeitenCeramic Materials: Introduction!: MCEN90014: Materials ! ! !dr. K. Xia! ! ! !1!hamalNoch keine Bewertungen
- ThanksDokument17 SeitenThankssselvanjhcNoch keine Bewertungen
- Speaker Bio - : Anupam Shil Is Working With STP Limited As SBU HeadDokument38 SeitenSpeaker Bio - : Anupam Shil Is Working With STP Limited As SBU HeadRainakNoch keine Bewertungen
- Presented By:: Rafi Sheikh Sheeraz Malik Syed Ahmed Ali Umair Ali Waqar AmeenDokument34 SeitenPresented By:: Rafi Sheikh Sheeraz Malik Syed Ahmed Ali Umair Ali Waqar AmeenSyed Ahmed AliNoch keine Bewertungen
- The DSPRCDFMT Utility Version 2.0Dokument9 SeitenThe DSPRCDFMT Utility Version 2.0rachmat99Noch keine Bewertungen
- Machine Safeguarding at The Point of Operation: A Guide For Finding Solutions To Machine HazardsDokument60 SeitenMachine Safeguarding at The Point of Operation: A Guide For Finding Solutions To Machine HazardsYovanyCalPadillaNoch keine Bewertungen
- Unit 5 GeosyntheticsDokument315 SeitenUnit 5 Geosyntheticskowshik1737551Noch keine Bewertungen
- Water Technology 2015 2016 1Dokument86 SeitenWater Technology 2015 2016 1Srinivas AkHilNoch keine Bewertungen
- Subsea AccumulatorsDokument4 SeitenSubsea AccumulatorsAbdul Hameed OmarNoch keine Bewertungen
- Polymers For Transdermal Drug Delivery SystemsDokument9 SeitenPolymers For Transdermal Drug Delivery SystemsAmjadRazaNoch keine Bewertungen
- Development of Rotary Weeder Blades by Finite Element MethodDokument5 SeitenDevelopment of Rotary Weeder Blades by Finite Element MethodijsretNoch keine Bewertungen
- Ehe 07Dokument286 SeitenEhe 07api-348272721Noch keine Bewertungen
- L-1363J - Corrected 20210420Dokument77 SeitenL-1363J - Corrected 20210420Juan TapiaNoch keine Bewertungen
- HP40 NBDokument13 SeitenHP40 NBTarun ChandraNoch keine Bewertungen
- TK-C Transmitter PDFDokument4 SeitenTK-C Transmitter PDFGopal HegdeNoch keine Bewertungen
- Project Steel - Final ReportDokument42 SeitenProject Steel - Final Reportashikur rahmanNoch keine Bewertungen
- L1F1Dokument5 SeitenL1F1DanielNoch keine Bewertungen
- SYNC2000 - 4.00.022014 Protocol ConverterDokument2 SeitenSYNC2000 - 4.00.022014 Protocol ConverterAnasSalemNoch keine Bewertungen
- ME Harmonization Curricilum FinalDokument307 SeitenME Harmonization Curricilum Finalratchagaraja33% (3)
- Brickwork ApparatusDokument4 SeitenBrickwork ApparatusRoslie AbdullahNoch keine Bewertungen
- Hot Water Recirculation PumpsDokument22 SeitenHot Water Recirculation Pumpsniaz kilamNoch keine Bewertungen
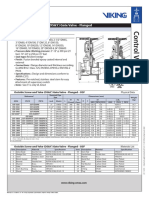
- Outside Screw and Yoke (OS&Y) Gate Valve - Flanged: Technical FeaturesDokument2 SeitenOutside Screw and Yoke (OS&Y) Gate Valve - Flanged: Technical FeaturesMark Louie GuintoNoch keine Bewertungen
- Education Abbreviation by AffairsCloudDokument6 SeitenEducation Abbreviation by AffairsCloudgsaijanardhanNoch keine Bewertungen
- AragoniteDokument1 SeiteAragonitescaravelo7633Noch keine Bewertungen
- SensoNODE Catalog 3864 Feb 2015Dokument28 SeitenSensoNODE Catalog 3864 Feb 2015btsgr parkerNoch keine Bewertungen
- Maintenence SchedulingDokument4 SeitenMaintenence SchedulingCarloVanZyl0% (1)
- MS275 10 Inch Compound Miter Saw MB4B2ADokument4 SeitenMS275 10 Inch Compound Miter Saw MB4B2ArightoutacontrolNoch keine Bewertungen
- AY 2015-16cvbbnjDokument245 SeitenAY 2015-16cvbbnjSyed Abdul AzizNoch keine Bewertungen