Das könnte Ihnen auch gefallen
- Apgeneradoresdeclock 2003Dokument20 SeitenApgeneradoresdeclock 2003Генри МысNoch keine Bewertungen
- Analisis de Fourier ContinuoDokument16 SeitenAnalisis de Fourier ContinuoJuan David Velasquez BranNoch keine Bewertungen
- Definicion de Una FuncionDokument2 SeitenDefinicion de Una FuncionRolando PerezNoch keine Bewertungen
- AgriculturaDokument8 SeitenAgriculturaJuan David Velasquez BranNoch keine Bewertungen
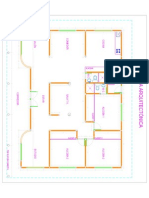
- Planta ColDokument1 SeitePlanta ColJuan David Velasquez BranNoch keine Bewertungen
- AporDokument1 SeiteAporJuan David Velasquez BranNoch keine Bewertungen
- PracticDokument5 SeitenPracticJuan David Velasquez BranNoch keine Bewertungen
- Paso de ParametrosDokument2 SeitenPaso de ParametrosJuan David Velasquez BranNoch keine Bewertungen
- ReferenciasDokument1 SeiteReferenciasJuan David Velasquez BranNoch keine Bewertungen
- FuncionesDokument1 SeiteFuncionesJuan David Velasquez BranNoch keine Bewertungen
- Tipos de FuncionesDokument4 SeitenTipos de FuncionesJuan David Velasquez BranNoch keine Bewertungen
- FuncionesDokument1 SeiteFuncionesJuan David Velasquez BranNoch keine Bewertungen
- Paso de ParametrosDokument2 SeitenPaso de ParametrosJuan David Velasquez BranNoch keine Bewertungen
- Metodología Del Aprendizaje Basado en Problemas Libro - MurciaDokument281 SeitenMetodología Del Aprendizaje Basado en Problemas Libro - MurciaPepe AgNoch keine Bewertungen
- Tutorial MatlabDokument115 SeitenTutorial MatlabCarlos E. Caceres GonzalezNoch keine Bewertungen
- ProgDokument7 SeitenProgJuan David Velasquez BranNoch keine Bewertungen
- Campos 2 EjerDokument5 SeitenCampos 2 EjerJuan David Velasquez BranNoch keine Bewertungen
- Operaciones VectorialesDokument3 SeitenOperaciones VectorialesJuan David Velasquez BranNoch keine Bewertungen
- Cou LombDokument3 SeitenCou LombJuan David Velasquez BranNoch keine Bewertungen
- Algoritmos 50 EjemplosDokument37 SeitenAlgoritmos 50 Ejemplosjaeo0078Noch keine Bewertungen
- Guia de Reporte Revision BibliograficaDokument18 SeitenGuia de Reporte Revision BibliograficaJuan David Velasquez BranNoch keine Bewertungen
- InsumosDokument1 SeiteInsumosJuan David Velasquez BranNoch keine Bewertungen
- Guia de Reporte Revision BibliograficaDokument1 SeiteGuia de Reporte Revision BibliograficaJuan David Velasquez BranNoch keine Bewertungen
- Diagrama de FlujoDokument1 SeiteDiagrama de FlujoJuan David Velasquez BranNoch keine Bewertungen
- Generalidades de La Tensión y de Las Galgas ExtensiométricasDokument4 SeitenGeneralidades de La Tensión y de Las Galgas ExtensiométricasJuan David Velasquez BranNoch keine Bewertungen
- Codigo de Fuente Del Micro 16f877Dokument10 SeitenCodigo de Fuente Del Micro 16f877Juan David Velasquez BranNoch keine Bewertungen
- Senales 1Dokument17 SeitenSenales 1jhoar1987Noch keine Bewertungen
- Cuento UrtinDokument3 SeitenCuento UrtinElizabeth Gonzales CasasNoch keine Bewertungen
- Manual Operacion Simoprime Rev1 PDFDokument57 SeitenManual Operacion Simoprime Rev1 PDFMiguel Santisteban YoveraNoch keine Bewertungen
- Concepto de RectificaciónDokument6 SeitenConcepto de Rectificacióntelectric2004Noch keine Bewertungen
- Análisis Vibracional Turbogenerador Siemens 35MWDokument1 SeiteAnálisis Vibracional Turbogenerador Siemens 35MWhomeroNoch keine Bewertungen
- Unidad 5 Xochitl Turbinas de VaporDokument8 SeitenUnidad 5 Xochitl Turbinas de VaporMaria GonzalesNoch keine Bewertungen
- Ejercicios Modelos 4Dokument4 SeitenEjercicios Modelos 4Hugo MadrigalNoch keine Bewertungen
- CHEVRON PetroleumDokument10 SeitenCHEVRON PetroleumFrancisco MorteoNoch keine Bewertungen
- Instalaciones Industriales 1 PDFDokument576 SeitenInstalaciones Industriales 1 PDFKarlita M.Noch keine Bewertungen
- Dimensionado PAT en Régimen TTDokument15 SeitenDimensionado PAT en Régimen TTKoslerNoch keine Bewertungen
- Puesta en Servicio Trafomix PDFDokument4 SeitenPuesta en Servicio Trafomix PDFMartin Flores JavierNoch keine Bewertungen
- Carta PsicometricaDokument5 SeitenCarta PsicometricaalexNoch keine Bewertungen
- CLG920D 922D SPDokument175 SeitenCLG920D 922D SPCarlos Alberto Teheran Jimenez100% (7)
- 2736 FaxDokument6 Seiten2736 FaxErwin Antonio JVNoch keine Bewertungen
- PD Ej12Dokument2 SeitenPD Ej12Aarom RojasNoch keine Bewertungen
- Practica # 2 - Rectificador Monofasico de Onda Completa - Toma Central y Con Puente RectificadorDokument13 SeitenPractica # 2 - Rectificador Monofasico de Onda Completa - Toma Central y Con Puente Rectificadormega235235Noch keine Bewertungen
- Conclucion y RecomendacionesDokument1 SeiteConclucion y Recomendacionesthe best musicNoch keine Bewertungen
- Amef DosificadorDokument8 SeitenAmef DosificadorGabriel CastañedaNoch keine Bewertungen
- Herramientas CríticasDokument9 SeitenHerramientas CríticasKalet Apaza Torres100% (4)
- Solución A Códigos de Errores en Neveras SamsungDokument20 SeitenSolución A Códigos de Errores en Neveras SamsungMarbey Martínez66% (29)
- Trabajo 1 - Energias Sustentables - Gabriel Gallegos - Cci703-2100-Taller de Instalaciones de EnergiasDokument16 SeitenTrabajo 1 - Energias Sustentables - Gabriel Gallegos - Cci703-2100-Taller de Instalaciones de EnergiasGabriel GallegosNoch keine Bewertungen
- GMK 3055Dokument24 SeitenGMK 3055Letácio OliveiraNoch keine Bewertungen
- Foro TematicoDokument1 SeiteForo TematicoCamilo Yamil Mamani RamosNoch keine Bewertungen
- Sistema Eléctrico Del EcuadorDokument71 SeitenSistema Eléctrico Del EcuadorEdwin JachoNoch keine Bewertungen
- GasoductosDokument1 SeiteGasoductosluisNoch keine Bewertungen
- Compresor Refrigerante PruebaDokument8 SeitenCompresor Refrigerante PruebaCristian Esteban Correa IrribarraNoch keine Bewertungen
- Hager EK370Dokument3 SeitenHager EK370kinitero3109Noch keine Bewertungen
- Trabajo Escalonado de Instalaciones EléctricasDokument15 SeitenTrabajo Escalonado de Instalaciones EléctricasLuis Fernando Reaño RivasplataNoch keine Bewertungen
- Problemas - Ciclo BraytonDokument2 SeitenProblemas - Ciclo BraytonEduardo Martín CanoNoch keine Bewertungen
- Taller Sobre Extintores (Coco)Dokument38 SeitenTaller Sobre Extintores (Coco)Rafael ParraNoch keine Bewertungen
- Proyecto Instalacion Paneles Solares en Estacion de ServicioDokument12 SeitenProyecto Instalacion Paneles Solares en Estacion de ServicioJaime Jara Hill TatoNoch keine Bewertungen