Das könnte Ihnen auch gefallen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- BioTime 8.5 User ManualDokument144 SeitenBioTime 8.5 User ManualKashif Adeel50% (2)
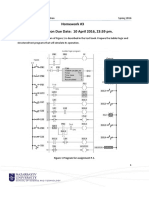
- hw1 PDFDokument6 Seitenhw1 PDFrightheartedNoch keine Bewertungen
- ROBT308Lecture22Spring16 PDFDokument52 SeitenROBT308Lecture22Spring16 PDFrightheartedNoch keine Bewertungen
- Diagbootx: // Public Release 1Dokument4 SeitenDiagbootx: // Public Release 1Tedy AdhinegoroNoch keine Bewertungen
- BEAM DIAGRAMS AND FORMULAS For Various Static Loading Conditions, AISC ASD 8 EdDokument7 SeitenBEAM DIAGRAMS AND FORMULAS For Various Static Loading Conditions, AISC ASD 8 EdEdon MorinaNoch keine Bewertungen
- HW3 PDFDokument2 SeitenHW3 PDFrightheartedNoch keine Bewertungen
- AN00131 - USB CDC ECM Class For Ethernet Over USB - 2.0.2rc1 PDFDokument31 SeitenAN00131 - USB CDC ECM Class For Ethernet Over USB - 2.0.2rc1 PDFrightheartedNoch keine Bewertungen
- HW5 PDFDokument1 SeiteHW5 PDFrightheartedNoch keine Bewertungen
- Root Locus: ROBT303 Linear Control Theory With LabDokument28 SeitenRoot Locus: ROBT303 Linear Control Theory With LabrightheartedNoch keine Bewertungen
- Robt303 HW3 PDFDokument1 SeiteRobt303 HW3 PDFrightheartedNoch keine Bewertungen
- ROBT308HW03Spring16 PDFDokument7 SeitenROBT308HW03Spring16 PDFrightheartedNoch keine Bewertungen
- Root Locus: ROBT303 Linear Control Theory With LabDokument38 SeitenRoot Locus: ROBT303 Linear Control Theory With LabrightheartedNoch keine Bewertungen
- Robt401 Manipulator Kinematics FINAL PDFDokument50 SeitenRobt401 Manipulator Kinematics FINAL PDFrightheartedNoch keine Bewertungen
- Robt401 Manipulator Kinematics FINAL PDFDokument50 SeitenRobt401 Manipulator Kinematics FINAL PDFrightheartedNoch keine Bewertungen
- Robt304 Project Report PDFDokument13 SeitenRobt304 Project Report PDFrightheartedNoch keine Bewertungen
- ROBT308Lecture24Spring16 PDFDokument28 SeitenROBT308Lecture24Spring16 PDFrightheartedNoch keine Bewertungen
- Learning From Data Solutions To Selected Exercises: N N M J J N 2Dokument4 SeitenLearning From Data Solutions To Selected Exercises: N N M J J N 2rightheartedNoch keine Bewertungen
- 1: The Learning ProblemDokument27 Seiten1: The Learning ProblemrightheartedNoch keine Bewertungen
- TH 2100Dokument67 SeitenTH 2100KI TechnologiesNoch keine Bewertungen
- Seborg Chapter 1Dokument3 SeitenSeborg Chapter 1maykesguerraNoch keine Bewertungen
- ACPS CP S1 01 FDA SlidesDokument78 SeitenACPS CP S1 01 FDA SlidesBlueSagaNoch keine Bewertungen
- High-Resolution Screening of Metabolite-Like Lead LibrariesDokument114 SeitenHigh-Resolution Screening of Metabolite-Like Lead LibrariesBuscador AlfaNoch keine Bewertungen
- Yohimbine InjectionDokument1 SeiteYohimbine InjectionKasidit SornchaiNoch keine Bewertungen
- Compre Queation PaperDokument6 SeitenCompre Queation PaperGanesh DharmireddyNoch keine Bewertungen
- Vector AlgebraDokument7 SeitenVector AlgebraDeeeNoch keine Bewertungen
- Band Gaps and Electronics Structure of PerovskitesDokument12 SeitenBand Gaps and Electronics Structure of PerovskitesThanh Long TaNoch keine Bewertungen
- Crane Wheels-General InformationDokument3 SeitenCrane Wheels-General InformationArvind VaishNoch keine Bewertungen
- Modern Age Waste Water ProblemsDokument364 SeitenModern Age Waste Water Problemsromaehab201912Noch keine Bewertungen
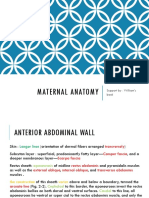
- Chapter 2 Maternal Anatomy WilliamsDokument60 SeitenChapter 2 Maternal Anatomy WilliamsDiskaAstariniNoch keine Bewertungen
- Minihydro GANZ enDokument5 SeitenMinihydro GANZ enRade NovakovicNoch keine Bewertungen
- GGGB6023 Tugasan Tutorial 3 - P69060 Mior SyazrilDokument5 SeitenGGGB6023 Tugasan Tutorial 3 - P69060 Mior SyazrilAmizan AbdullahNoch keine Bewertungen
- 5 Key Factors To The Correct Cable Selection and ApplicationDokument7 Seiten5 Key Factors To The Correct Cable Selection and ApplicationSugeng SumarnoNoch keine Bewertungen
- Beration of LightDokument7 SeitenBeration of LightAnonymous i71HvPXNoch keine Bewertungen
- CAT Álogo de Peças de Reposi ÇÃO: Trator 5403Dokument364 SeitenCAT Álogo de Peças de Reposi ÇÃO: Trator 5403MARCOS DIONIS ALVES LIMANoch keine Bewertungen
- An Isogeometric Analysis Approach For The Study of Structural VibrationsDokument59 SeitenAn Isogeometric Analysis Approach For The Study of Structural VibrationsBharti SinghNoch keine Bewertungen
- Devlopment and Analysis of Natural Banana Fiber CompositeDokument3 SeitenDevlopment and Analysis of Natural Banana Fiber CompositeEditor IJRITCCNoch keine Bewertungen
- Module 3Dokument10 SeitenModule 3Michael godsonNoch keine Bewertungen
- Midterm rp - Nguyễn Phú Minh Nhật - 20202795Dokument1 SeiteMidterm rp - Nguyễn Phú Minh Nhật - 20202795Minh Nhật100% (1)
- Thermodynamics NotesDokument2 SeitenThermodynamics Notesjpu_48Noch keine Bewertungen
- SolutionsDokument8 SeitenSolutionsJavid BalakishiyevNoch keine Bewertungen
- Basic Electronics (ES-112)Dokument49 SeitenBasic Electronics (ES-112)Bharat LalNoch keine Bewertungen
- Sc3 Lecture Short CKT Currents BMR Feb.03, 2021Dokument11 SeitenSc3 Lecture Short CKT Currents BMR Feb.03, 2021Khizer AminNoch keine Bewertungen
- 4-6 Practice: The Quadratic Formula and The DiscriminantDokument1 Seite4-6 Practice: The Quadratic Formula and The Discriminantasdfasdfasdfasdfasdf0% (1)
- Register Transfer LanguageDokument11 SeitenRegister Transfer LanguageShiva IdokNoch keine Bewertungen
- IECEx INE 12.0010X 002Dokument9 SeitenIECEx INE 12.0010X 002Marcos SiqueiraNoch keine Bewertungen
- Chapter 1 - Steam GenerationDokument23 SeitenChapter 1 - Steam GenerationAzhan FikriNoch keine Bewertungen