Das könnte Ihnen auch gefallen
- Guia Practica FBP006Dokument10 SeitenGuia Practica FBP006ronald_maydanaNoch keine Bewertungen
- Modelo de Plan de Vigilancia Covid19 para Metal MecanicaDokument12 SeitenModelo de Plan de Vigilancia Covid19 para Metal Mecanicamarcos asteteNoch keine Bewertungen
- Definición Axiomática de Los Números Reales.Dokument29 SeitenDefinición Axiomática de Los Números Reales.sergio Amaya100% (1)
- Plan de Trabajo SoldaduraDokument1 SeitePlan de Trabajo SoldaduraDM Seguridad, Salud ocupacional y Medio AmbienteNoch keine Bewertungen
- El Espejo Del Lider ResumenDokument23 SeitenEl Espejo Del Lider ResumenRubén Vilca RoqueNoch keine Bewertungen
- Analisis Estadistico y Esquema Del Proyecto de TesisDokument40 SeitenAnalisis Estadistico y Esquema Del Proyecto de TesisAndrés David Sanga TitoNoch keine Bewertungen
- Hablar Castellano Cuesta CaroDokument8 SeitenHablar Castellano Cuesta CaroGorky Luis Ramos Cuzque50% (2)
- Ssoma - F-32 - Matriz Iperc - Area de ContabilidadDokument6 SeitenSsoma - F-32 - Matriz Iperc - Area de ContabilidadYavar TequenNoch keine Bewertungen
- Anexo 10 PetsDokument2 SeitenAnexo 10 PetsAlexander MedinaNoch keine Bewertungen
- Horario de Clases 2020 (San Miguel Arcangel)Dokument1 SeiteHorario de Clases 2020 (San Miguel Arcangel)Yeison ParraNoch keine Bewertungen
- Ficha de Datos de Seguridad GasolinaDokument4 SeitenFicha de Datos de Seguridad GasolinaHSQ Biocarbono SASNoch keine Bewertungen
- 20 11 14Dokument16 Seiten20 11 14Luis Chilo Miranda0% (1)
- Manual de Prevencion de Perdidas Minera Yanacocha SRLDokument4 SeitenManual de Prevencion de Perdidas Minera Yanacocha SRLEnrique Arturo Salas HilarioNoch keine Bewertungen
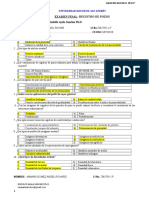
- Examen Final Angel Richard Maamni-1Dokument3 SeitenExamen Final Angel Richard Maamni-1Erika Mishel Quenallata RamosNoch keine Bewertungen
- OBAHCPE-1904120954.013-1904120954.19 Técnico Apoyo Rampa - Estibador ATO SRZ-1904120954Dokument5 SeitenOBAHCPE-1904120954.013-1904120954.19 Técnico Apoyo Rampa - Estibador ATO SRZ-1904120954onni arispeNoch keine Bewertungen
- Anexo 2 - Formato Matriz Gestión de Riesgos Seguridad - v04Dokument1 SeiteAnexo 2 - Formato Matriz Gestión de Riesgos Seguridad - v04Enrique Arturo Salas HilarioNoch keine Bewertungen
- Certificado de Calidad 119-16 Bateas y CanastillosDokument3 SeitenCertificado de Calidad 119-16 Bateas y CanastillosELPuntoDELANoticiaNoch keine Bewertungen
- 01 Rimac Seguridad Trabajos en Altura PDFDokument64 Seiten01 Rimac Seguridad Trabajos en Altura PDFAnonymous C4PJCOz6100% (1)
- Ats Planta de Agua 13-02-2014Dokument4 SeitenAts Planta de Agua 13-02-2014Rogers Diaz Melo100% (1)
- Constancia de Autorizacion para El ViajeDokument1 SeiteConstancia de Autorizacion para El ViajeJuvenal Cruz CarbajalNoch keine Bewertungen
- Estad Plic Inv DosDokument116 SeitenEstad Plic Inv DosAnonymous 0lrN5QTNoch keine Bewertungen
- Norma Iso 45001Dokument21 SeitenNorma Iso 45001Ingrid Johana Muñoz RodriguezNoch keine Bewertungen
- Organigrama Funcional MetacaDokument1 SeiteOrganigrama Funcional MetacaLuis AlbertoNoch keine Bewertungen
- Examen Modulo 5Dokument6 SeitenExamen Modulo 5somanNoch keine Bewertungen
- Libro Del ProfeDokument149 SeitenLibro Del ProfeCARLOS MELGAREJO HERNANDEZNoch keine Bewertungen
- Mate Texto ParaleloDokument26 SeitenMate Texto ParaleloDashSarti100% (1)
- Matriz - de - Dispersión - Temática - e - Índice - 2 (1) 2Dokument5 SeitenMatriz - de - Dispersión - Temática - e - Índice - 2 (1) 2Jhoni Omar Araujo BaylonNoch keine Bewertungen
- Formato Carta ANEXO 1Dokument3 SeitenFormato Carta ANEXO 1Cinthia lopez callauNoch keine Bewertungen
- Nathalia Maldonado (1) PMVDokument4 SeitenNathalia Maldonado (1) PMVnathaliamaldonadopNoch keine Bewertungen
- Quimica Mapas NfpaDokument4 SeitenQuimica Mapas NfpaMelissa TuiranNoch keine Bewertungen
- Charla de Uso de GuantesDokument4 SeitenCharla de Uso de Guantesvictor GomezNoch keine Bewertungen
- B) Numeros Reales (Demostraciones)Dokument8 SeitenB) Numeros Reales (Demostraciones)WagnerYoplacTrauco100% (1)
- EXAMEN DE G.C PARCIAL 1 - A PRACTICO TatianaDokument21 SeitenEXAMEN DE G.C PARCIAL 1 - A PRACTICO TatianaThatiana Anglas sotoNoch keine Bewertungen
- C 4Dokument719 SeitenC 4Angelo Martinez100% (1)
- Check List EscaleraDokument1 SeiteCheck List EscaleraBel CRNoch keine Bewertungen
- Unsa-Trabajo de Gerencia EstrategicaDokument18 SeitenUnsa-Trabajo de Gerencia EstrategicaMishell Milagros AucahuaquiNoch keine Bewertungen
- Tendencias Digitales Validus LatinoamericaDokument23 SeitenTendencias Digitales Validus LatinoamericaFredy EspinozaNoch keine Bewertungen
- Resultados2017 2Dokument26 SeitenResultados2017 2Manuelito Ze0% (2)
- 03 Funciones de Texto OkDokument3 Seiten03 Funciones de Texto Okjcarloo100% (1)
- FO-SSO-003 - Formato de Entrega de Equipos de Proteccion PersonalDokument1 SeiteFO-SSO-003 - Formato de Entrega de Equipos de Proteccion PersonalCarolina Cotrina FloresNoch keine Bewertungen
- Informe de RelevamientoDokument6 SeitenInforme de Relevamientomaxi182Noch keine Bewertungen
- Coishco CompletoDokument38 SeitenCoishco CompletoUrsulaSaraviaVillegas100% (2)
- Solicitud de Aprobación de Curso Cocurricular de NataciónDokument2 SeitenSolicitud de Aprobación de Curso Cocurricular de NataciónKeithSix Yman ArrietaNoch keine Bewertungen
- Lista de Materiales Peligrosos y Matriz de CompatibilidadDokument16 SeitenLista de Materiales Peligrosos y Matriz de CompatibilidadCarlos VALDERA YSLANoch keine Bewertungen
- Carta MultipleDokument26 SeitenCarta MultipleLisber MegoNoch keine Bewertungen
- Biografía de Guillermo PattersonDokument4 SeitenBiografía de Guillermo PattersonJose David AbregoNoch keine Bewertungen
- PDT - Trabajos en AlturaDokument2 SeitenPDT - Trabajos en AlturaRosela Guimet100% (1)
- Práctica de Campo - Semana 3Dokument4 SeitenPráctica de Campo - Semana 3Jose Junior Alvarez PovisNoch keine Bewertungen
- Formato Ats DiarioDokument8 SeitenFormato Ats DiarioMONICA ROMERONoch keine Bewertungen
- Informe Seguridad Industrial TerminadDokument29 SeitenInforme Seguridad Industrial TerminadKevin Gonzales CastroNoch keine Bewertungen
- Anexo 02 - Lista Estandarizada de Peligros y Riesgos de Salud - 10.02.16Dokument1 SeiteAnexo 02 - Lista Estandarizada de Peligros y Riesgos de Salud - 10.02.16felix angel rivera garcia0% (1)
- Registro de Reposición de EppDokument1 SeiteRegistro de Reposición de EppLeslie Manosalva RodriguezNoch keine Bewertungen
- Reglamento Interno de Seguridad y Salud en El Trabajo 2017 (Versión 02) PDFDokument78 SeitenReglamento Interno de Seguridad y Salud en El Trabajo 2017 (Versión 02) PDFEnrique MartinezNoch keine Bewertungen
- T1 - ProbabilidadDokument12 SeitenT1 - ProbabilidadRasec CésarNoch keine Bewertungen
- Actividad - Mapa Conceptual de Normas y Estándares.Dokument2 SeitenActividad - Mapa Conceptual de Normas y Estándares.joseNoch keine Bewertungen
- Anexo de Induccion - Hombre Nuevo - Constancia de Apto - AnexoDokument6 SeitenAnexo de Induccion - Hombre Nuevo - Constancia de Apto - AnexoGlen Jhonathan Cabosmalon ChecyaNoch keine Bewertungen
- Funciones Reales de Variable Real Lisardo Fundamentos de CalculoDokument63 SeitenFunciones Reales de Variable Real Lisardo Fundamentos de Calculofl2119obandoNoch keine Bewertungen
- Tema 2 - MATE BIOLOGIADokument44 SeitenTema 2 - MATE BIOLOGIASer BlancNoch keine Bewertungen
- Funciones-Xioby ChavezDokument24 SeitenFunciones-Xioby ChavezVictor RodriguezNoch keine Bewertungen
- Amino Acid OsDokument2 SeitenAmino Acid Osangel pablo abarca garibayNoch keine Bewertungen
- Guía 3 Movimiento de ProyectilesDokument2 SeitenGuía 3 Movimiento de ProyectilesJavi OlmNoch keine Bewertungen
- 2020 Muestreo y Distribuciones de MuestreoDokument34 Seiten2020 Muestreo y Distribuciones de MuestreoJavi OlmNoch keine Bewertungen
- 2020 Estadistica-Exploración y Resumen de DatosDokument71 Seiten2020 Estadistica-Exploración y Resumen de DatosJavi OlmNoch keine Bewertungen
- 2020 Estimación de Parametros y Pruebas de HipotesisDokument51 Seiten2020 Estimación de Parametros y Pruebas de HipotesisJavi OlmNoch keine Bewertungen
- 2020 Probabilidad-Basica y Modelos de ProbabilidadDokument80 Seiten2020 Probabilidad-Basica y Modelos de ProbabilidadJavi OlmNoch keine Bewertungen
- Propuesta Didáctica Estadística Química 2018 - 2019Dokument9 SeitenPropuesta Didáctica Estadística Química 2018 - 2019Javi OlmNoch keine Bewertungen
- Guía 4 Movimiento CircularDokument1 SeiteGuía 4 Movimiento CircularJavi OlmNoch keine Bewertungen
- Fisica Iii - Modelos de ExamenDokument18 SeitenFisica Iii - Modelos de ExamenJavi OlmNoch keine Bewertungen
- Oviedo SergioDokument7 SeitenOviedo SergioJavi OlmNoch keine Bewertungen
- OlmedoFrancisco - Act N 3Dokument3 SeitenOlmedoFrancisco - Act N 3Javi OlmNoch keine Bewertungen
- Trabajo Practico #1.2Dokument3 SeitenTrabajo Practico #1.2Javi OlmNoch keine Bewertungen
- OlmedoFrancisco - Act N 2Dokument4 SeitenOlmedoFrancisco - Act N 2Javi OlmNoch keine Bewertungen
- OlmedoFrancisco - Act N 1Dokument3 SeitenOlmedoFrancisco - Act N 1Javi OlmNoch keine Bewertungen
- Unidad 1Dokument16 SeitenUnidad 1Javi OlmNoch keine Bewertungen
- OlmedoFrancisco - Act N 4Dokument3 SeitenOlmedoFrancisco - Act N 4Javi OlmNoch keine Bewertungen
- Serie de Problemas 2020Dokument19 SeitenSerie de Problemas 2020Javi OlmNoch keine Bewertungen
- Seminario N° 1Dokument1 SeiteSeminario N° 1Javi OlmNoch keine Bewertungen
- OlmedoFrancisco - Act N 0Dokument1 SeiteOlmedoFrancisco - Act N 0Javi OlmNoch keine Bewertungen
- Fisica III Academia Phyquimath 1Dokument5 SeitenFisica III Academia Phyquimath 1Javi OlmNoch keine Bewertungen
- Trabajo Practico #1.1Dokument3 SeitenTrabajo Practico #1.1Javi OlmNoch keine Bewertungen
- EspectroscopíaDokument44 SeitenEspectroscopíaYoselinRamos50% (2)
- Nomenclatura Química Orgánica-2012Dokument14 SeitenNomenclatura Química Orgánica-2012Daniela TerrazasNoch keine Bewertungen
- Unidad01 FISICA III PDFDokument20 SeitenUnidad01 FISICA III PDFJavi OlmNoch keine Bewertungen
- Guia #1Dokument2 SeitenGuia #1Javi OlmNoch keine Bewertungen
- Guia #1Dokument2 SeitenGuia #1Javi OlmNoch keine Bewertungen
- Metales AlcalinosDokument4 SeitenMetales AlcalinosJavi OlmNoch keine Bewertungen
- Trabajo Práctico #0Dokument2 SeitenTrabajo Práctico #0Javi OlmNoch keine Bewertungen
- Metales Alcalinos TerreosDokument6 SeitenMetales Alcalinos TerreosJavi OlmNoch keine Bewertungen
- Biologia Carpeta TeoricaDokument115 SeitenBiologia Carpeta TeoricaJavi OlmNoch keine Bewertungen
- Clase 1Dokument29 SeitenClase 1s03052cNoch keine Bewertungen
- Ejercicios 3 Ley de MendelDokument1 SeiteEjercicios 3 Ley de MendelDiego AgudeloNoch keine Bewertungen
- Conferencias BioNeuroEmocion - Enlaces OrdenadosDokument5 SeitenConferencias BioNeuroEmocion - Enlaces OrdenadosHoworth Valero100% (1)
- Dieta EquilibradaDokument5 SeitenDieta EquilibradaAsmodeus AngelNoch keine Bewertungen
- Guia 4 Razones Trigonometricas de Angulos AgudosDokument6 SeitenGuia 4 Razones Trigonometricas de Angulos AgudosfjavierschNoch keine Bewertungen
- AV Sem 4Dokument3 SeitenAV Sem 4Daniel Porras DelgadilloNoch keine Bewertungen
- Manual y de Conoc. y Mtto. I-Iv Escalon Fus. HKDokument65 SeitenManual y de Conoc. y Mtto. I-Iv Escalon Fus. HKJUAN RAMON BUESTAN GUAYLLASNoch keine Bewertungen
- Curso Sistema Frenos Antibloqueo Abs Bosch 5 3 Especificaciones Unidad Control Electronico Hidraulico Hecu EbdDokument23 SeitenCurso Sistema Frenos Antibloqueo Abs Bosch 5 3 Especificaciones Unidad Control Electronico Hidraulico Hecu EbdErickson Alhuay100% (1)
- TDR IrrigacionDokument27 SeitenTDR IrrigacionsmithNoch keine Bewertungen
- Plan de Contingencia Apu Sunset FestDokument11 SeitenPlan de Contingencia Apu Sunset FestBrii Ochoa RamosNoch keine Bewertungen
- Trabajo MediosDokument46 SeitenTrabajo MediosGuillermo Pomalaya FernandezNoch keine Bewertungen
- Prueba OTISDokument7 SeitenPrueba OTISHenry Alvarez85% (13)
- Boletín MRU Y MRUA UD1Dokument3 SeitenBoletín MRU Y MRUA UD1samupont13Noch keine Bewertungen
- Cuando La Voluntad FallaDokument7 SeitenCuando La Voluntad FallaMary MuñozNoch keine Bewertungen
- Metros Flexografia y RefiladoDokument2 SeitenMetros Flexografia y Refiladojguillermo91Noch keine Bewertungen
- 4 Cambio de Variable en Integrales DoblesDokument16 Seiten4 Cambio de Variable en Integrales DoblesErica Yanila Espinoza PonteNoch keine Bewertungen
- Importancia Del RenacimientoDokument14 SeitenImportancia Del RenacimientoJorge Lasprilla100% (1)
- Sesión de Tutoría n9Dokument6 SeitenSesión de Tutoría n9Ronald Alcántara Quispe100% (1)
- Empresa Textil - PPDokument16 SeitenEmpresa Textil - PPRobin Christian Toranzo SanzNoch keine Bewertungen
- Planes EquipoDokument21 SeitenPlanes EquipoMonse SalazarNoch keine Bewertungen
- Prueba de Sensores Con El Multimetro y OsciloscopioDokument20 SeitenPrueba de Sensores Con El Multimetro y OsciloscopioRichard Guaman Paucar100% (6)
- Ficha de EvaluacionDokument4 SeitenFicha de EvaluacionWendy Carla Ramallo JimenezNoch keine Bewertungen
- Órganos Genitales FemeninosDokument12 SeitenÓrganos Genitales Femeninosapi-3828621100% (3)
- Clase 7 Objetivos de Desarrollo Sostenibles FinalDokument71 SeitenClase 7 Objetivos de Desarrollo Sostenibles FinalCARLOS ANDRES PUENTE ROSERONoch keine Bewertungen
- Tab MCDT Convencionados - 6agosto2012Dokument32 SeitenTab MCDT Convencionados - 6agosto2012Célia MullerNoch keine Bewertungen
- Partes de La MarimbaDokument7 SeitenPartes de La MarimbaSwitchfoot TiuNoch keine Bewertungen
- Dietas HospitalariasDokument16 SeitenDietas HospitalariasHeidy LauraNoch keine Bewertungen
- Instrumentación en FotometríaDokument5 SeitenInstrumentación en FotometríaBetty Lopez100% (1)
- Hongos MicroDokument3 SeitenHongos MicroAlejandroNoch keine Bewertungen
- Marco Teorico - ProcedimientoDokument2 SeitenMarco Teorico - ProcedimientoLissette RamosNoch keine Bewertungen