Das könnte Ihnen auch gefallen
- F - Cdy/Dt: Instrumentation and Process Control (2150504) Sem-V - CH Chapter Name: Response of Higher Order SystemDokument3 SeitenF - Cdy/Dt: Instrumentation and Process Control (2150504) Sem-V - CH Chapter Name: Response of Higher Order SystemBhakti MahbubaniNoch keine Bewertungen
- Damped VibratorDokument2 SeitenDamped VibratorBhakti MahbubaniNoch keine Bewertungen
- Analyzing a Damped Mass-Spring SystemDokument18 SeitenAnalyzing a Damped Mass-Spring SystemBhakti MahbubaniNoch keine Bewertungen
- Damping Second OrderDokument2 SeitenDamping Second OrderBhakti MahbubaniNoch keine Bewertungen
- Damped Vibrator Second Order SystemDokument2 SeitenDamped Vibrator Second Order SystemBhakti MahbubaniNoch keine Bewertungen
- Dynamic AnalysisDokument16 SeitenDynamic AnalysismshNoch keine Bewertungen
- Dr. Hassan Ali Revision: ENGD1106D Mechanical Principles-DynamicsDokument75 SeitenDr. Hassan Ali Revision: ENGD1106D Mechanical Principles-Dynamicslarla SinghalNoch keine Bewertungen
- Physics Mid-Sem CompilationDokument220 SeitenPhysics Mid-Sem Compilationdhruv goraiNoch keine Bewertungen
- Mechanical Vibrations Experiment Leaf PDFDokument9 SeitenMechanical Vibrations Experiment Leaf PDFfariskolej4946Noch keine Bewertungen
- DampingDokument20 SeitenDampingjudeekene_403330720100% (1)
- Dynamics Equations and ForcesDokument53 SeitenDynamics Equations and Forcesparmeshwar khendakeNoch keine Bewertungen
- Physical Principles of Vibration and Measurement TechniquesDokument9 SeitenPhysical Principles of Vibration and Measurement TechniquesSonali Bangar100% (1)
- Ch2 Fluid DynamicsDokument49 SeitenCh2 Fluid Dynamicsgaith syoofNoch keine Bewertungen
- Lecture 4 NotesDokument36 SeitenLecture 4 Notesahmed11 engyemenNoch keine Bewertungen
- Mechanical Vibrations Introduction - Types, Elements, Equations of MotionDokument36 SeitenMechanical Vibrations Introduction - Types, Elements, Equations of MotionMudit JainNoch keine Bewertungen
- System Requires Only One Coordinate To Describe Its Position at Any InstantDokument11 SeitenSystem Requires Only One Coordinate To Describe Its Position at Any Instantsrinu.boyaNoch keine Bewertungen
- Week 01-2Dokument60 SeitenWeek 01-2Tariq AlamNoch keine Bewertungen
- Lecture 10 Simple Harmonic MotionDokument60 SeitenLecture 10 Simple Harmonic MotionHashir AwanNoch keine Bewertungen
- Impulse Momentum AnalysisDokument56 SeitenImpulse Momentum Analysisiwhy_Noch keine Bewertungen
- DOM M S D F Harmonical Excited Vibration 1Dokument90 SeitenDOM M S D F Harmonical Excited Vibration 1Prajapati DhavalNoch keine Bewertungen
- On The Concept of Negative Damping: Workshop On "Mathematical Challenges and Modelling of Hydro Elasticity"Dokument24 SeitenOn The Concept of Negative Damping: Workshop On "Mathematical Challenges and Modelling of Hydro Elasticity"Anonymous xcFcOgMiNoch keine Bewertungen
- Method of undetermined coefficients for solving spring-mass dynamical systemsDokument18 SeitenMethod of undetermined coefficients for solving spring-mass dynamical systemsMatone MafologelaNoch keine Bewertungen
- CH (4) Simple HM0Dokument25 SeitenCH (4) Simple HM0szs11111111szsNoch keine Bewertungen
- Vibration Ch02 BASHMAL Ver1.0 PDFDokument53 SeitenVibration Ch02 BASHMAL Ver1.0 PDFإسماعيل مظفرNoch keine Bewertungen
- 11 Consevation of MoventumDokument77 Seiten11 Consevation of MoventumRamachandranPerumalNoch keine Bewertungen
- ME1402 Mechatronics Unit - 3Dokument71 SeitenME1402 Mechatronics Unit - 3Sandheep Radhakrishnan100% (7)
- FCE 301 ADokument11 SeitenFCE 301 Agideon kurNoch keine Bewertungen
- Chapter TwoDokument49 SeitenChapter TwoAbenezer MarkNoch keine Bewertungen
- Assignment 3Dokument8 SeitenAssignment 319ME010 BARATH.PNoch keine Bewertungen
- What Is The Damping ?Dokument20 SeitenWhat Is The Damping ?Charan Tej RudralaNoch keine Bewertungen
- Section - Mathematical Modeling of Mechanical SystemsDokument13 SeitenSection - Mathematical Modeling of Mechanical SystemsMandolinNoch keine Bewertungen
- Lecture 1Dokument25 SeitenLecture 1Ali KenesovNoch keine Bewertungen
- Final Lecture11Dokument48 SeitenFinal Lecture11ViralBipinchandraRathodNoch keine Bewertungen
- Newton's Laws Friction Forces Drag Terminal VelocityDokument14 SeitenNewton's Laws Friction Forces Drag Terminal VelocityNUR 'AIN NAJIHAH BINTI MAAROFNoch keine Bewertungen
- 4063607Dokument38 Seiten4063607alayuNoch keine Bewertungen
- Vibration Reference.: Timoshenko MedalistDokument15 SeitenVibration Reference.: Timoshenko MedalistChandra ClarkNoch keine Bewertungen
- Phy Lecture 1Dokument22 SeitenPhy Lecture 1TikTok vs AnimeNoch keine Bewertungen
- Chapter 8Dokument31 SeitenChapter 8Joshua HarrisNoch keine Bewertungen
- SHM OscillationsDokument12 SeitenSHM OscillationsShaheer UboyeNoch keine Bewertungen
- Oscillations TheoryDokument10 SeitenOscillations TheoryJoanna PanayiNoch keine Bewertungen
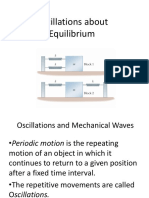
- OscillationsDokument29 SeitenOscillationsTetsuya OkazakiNoch keine Bewertungen
- Lecture # 1 Introduction To Mechanical VibrationDokument2 SeitenLecture # 1 Introduction To Mechanical VibrationIjazzzAliNoch keine Bewertungen
- Physics 1B Chapter 14 Periodic MotionDokument40 SeitenPhysics 1B Chapter 14 Periodic MotionsuperwebonNoch keine Bewertungen
- Pendulum Underdamped SystemDokument7 SeitenPendulum Underdamped SystemJitender YadavNoch keine Bewertungen
- Motion and Dynamics: 3.1 Making Sense of Dynamic EquilibriumDokument6 SeitenMotion and Dynamics: 3.1 Making Sense of Dynamic EquilibriumnasirfahimNoch keine Bewertungen
- OscillationsDokument29 SeitenOscillationsSepiso LubindaNoch keine Bewertungen
- Problem Solving Strategies: Mechanical EnergyDokument25 SeitenProblem Solving Strategies: Mechanical EnergyeviroyerNoch keine Bewertungen
- EUI - Static and Kinetic Coefficients of Friction ExperimentDokument22 SeitenEUI - Static and Kinetic Coefficients of Friction ExperimentMohammed ZaitounNoch keine Bewertungen
- Chapt 3 FrenchDokument61 SeitenChapt 3 FrenchSaurabh BorseNoch keine Bewertungen
- mth622 NotesDokument10 Seitenmth622 Notesfaisal chathaNoch keine Bewertungen
- Experiment # 1: ObjectiveDokument5 SeitenExperiment # 1: ObjectiveHurair Tariq FOE-PermanentNoch keine Bewertungen
- JPD - 2M Vibrations NotesDokument46 SeitenJPD - 2M Vibrations NotesHillel BadermanNoch keine Bewertungen
- TOPIC 13 REVISION: Free and Forced OscillationsDokument13 SeitenTOPIC 13 REVISION: Free and Forced OscillationsAkshayNoch keine Bewertungen
- Mechanical Vibration (Mamun Sir)Dokument52 SeitenMechanical Vibration (Mamun Sir)Nahik KabirNoch keine Bewertungen
- Lecture 3 - Conservation Equations Applied Computational Fluid DynamicsDokument33 SeitenLecture 3 - Conservation Equations Applied Computational Fluid DynamicsPragadeesh MohanNoch keine Bewertungen
- Chapter 14Dokument41 SeitenChapter 14engrroy100% (1)
- BeaconenglishDokument1 SeiteBeaconenglishBhakti MahbubaniNoch keine Bewertungen
- Maternity Leave and Paternity LeaveDokument6 SeitenMaternity Leave and Paternity LeaveBhakti Mahbubani0% (1)
- 23MSDS ZDBC (C)Dokument11 Seiten23MSDS ZDBC (C)Bhakti MahbubaniNoch keine Bewertungen
- CalculationsDokument4 SeitenCalculationsBhakti MahbubaniNoch keine Bewertungen
- Order IndiatimesDokument1 SeiteOrder IndiatimesBhakti MahbubaniNoch keine Bewertungen
- BeaconenglishDokument1 SeiteBeaconenglishBhakti MahbubaniNoch keine Bewertungen
- Late Coming NoticeDokument4 SeitenLate Coming NoticeBhakti MahbubaniNoch keine Bewertungen
- DlinkDokument5 SeitenDlinkBhakti MahbubaniNoch keine Bewertungen
- ApolloDokument2 SeitenApolloikesh mNoch keine Bewertungen
- Silica SpecificationsDokument2 SeitenSilica SpecificationsBhakti MahbubaniNoch keine Bewertungen
- Annexure BDokument1 SeiteAnnexure BBhakti MahbubaniNoch keine Bewertungen
- SWIFTDokument2 SeitenSWIFTManu BhardwajNoch keine Bewertungen
- You BroadDokument1 SeiteYou BroadBhakti MahbubaniNoch keine Bewertungen
- 032Dokument3 Seiten032Bhakti MahbubaniNoch keine Bewertungen
- Production Jan18Dokument1 SeiteProduction Jan18Bhakti MahbubaniNoch keine Bewertungen
- M Iv PDFDokument2 SeitenM Iv PDFBhakti MahbubaniNoch keine Bewertungen
- Invoice 1393070181Dokument1 SeiteInvoice 1393070181Bhakti MahbubaniNoch keine Bewertungen
- July'18-Opg Minutes of MeetingDokument2 SeitenJuly'18-Opg Minutes of MeetingBhakti MahbubaniNoch keine Bewertungen
- National & International Standards Master ListDokument2 SeitenNational & International Standards Master ListBhakti MahbubaniNoch keine Bewertungen
- MSE Paper Format SEM III VDokument2 SeitenMSE Paper Format SEM III VBhakti MahbubaniNoch keine Bewertungen
- Is Audit Report 14489 (07-03-2018-122522)Dokument37 SeitenIs Audit Report 14489 (07-03-2018-122522)Bhakti Mahbubani100% (4)
- JD Head SheDokument2 SeitenJD Head SheBhakti MahbubaniNoch keine Bewertungen
- Tuesday Morning Trip With UberDokument3 SeitenTuesday Morning Trip With UberBhakti MahbubaniNoch keine Bewertungen
- A Presentation On: Code of ConductDokument8 SeitenA Presentation On: Code of ConductBhakti MahbubaniNoch keine Bewertungen
- Factory Worker Muster Roll FormDokument30 SeitenFactory Worker Muster Roll FormBhakti MahbubaniNoch keine Bewertungen
- Gujarat Technological UniversityDokument3 SeitenGujarat Technological UniversityBhakti MahbubaniNoch keine Bewertungen
- Floating Roof TanksDokument123 SeitenFloating Roof TanksSalman BhattiNoch keine Bewertungen
- IATF - International Automotive Task Force: IATF 16949:2016 - Frequently Asked Question (FAQ)Dokument19 SeitenIATF - International Automotive Task Force: IATF 16949:2016 - Frequently Asked Question (FAQ)Arvin BabuNoch keine Bewertungen
- M IvDokument2 SeitenM IvBhakti MahbubaniNoch keine Bewertungen
- Membership Application Form: Gujarat Safety CouncilDokument2 SeitenMembership Application Form: Gujarat Safety CouncilBhakti MahbubaniNoch keine Bewertungen
- Numerical Methods: Jeffrey R. ChasnovDokument60 SeitenNumerical Methods: Jeffrey R. Chasnov2120 sanika GaikwadNoch keine Bewertungen
- SQL Server 2008 Failover ClusteringDokument176 SeitenSQL Server 2008 Failover ClusteringbiplobusaNoch keine Bewertungen
- Russian Tea Market Growth and Brand PreferenceDokument6 SeitenRussian Tea Market Growth and Brand PreferenceKing KhanNoch keine Bewertungen
- Human Resouse Accounting Nature and Its ApplicationsDokument12 SeitenHuman Resouse Accounting Nature and Its ApplicationsParas JainNoch keine Bewertungen
- May, 2013Dokument10 SeitenMay, 2013Jakob Maier100% (1)
- What is zone refining processDokument1 SeiteWhat is zone refining processKeshav MadanNoch keine Bewertungen
- APC Smart-UPS 1500VA LCD 230V: Part Number: SMT1500IDokument3 SeitenAPC Smart-UPS 1500VA LCD 230V: Part Number: SMT1500IDesigan SannasyNoch keine Bewertungen
- The Botanical AtlasDokument74 SeitenThe Botanical Atlasjamey_mork1100% (3)
- Major Bank Performance IndicatorsDokument35 SeitenMajor Bank Performance IndicatorsAshish MehraNoch keine Bewertungen
- Guide to Fair Value Measurement under IFRS 13Dokument3 SeitenGuide to Fair Value Measurement under IFRS 13Annie JuliaNoch keine Bewertungen
- Basic Five Creative ArtsDokument4 SeitenBasic Five Creative Artsprincedonkor177Noch keine Bewertungen
- TransistorDokument1 SeiteTransistorXhaNoch keine Bewertungen
- IP68 Rating ExplainedDokument12 SeitenIP68 Rating ExplainedAdhi ErlanggaNoch keine Bewertungen
- Material Safety Data Sheet Lime Kiln Dust: Rev. Date:5/1/2008Dokument6 SeitenMaterial Safety Data Sheet Lime Kiln Dust: Rev. Date:5/1/2008suckrindjink100% (1)
- Vidura College Marketing AnalysisDokument24 SeitenVidura College Marketing Analysiskingcoconut kingcoconutNoch keine Bewertungen
- Variable Speed Pump Efficiency Calculation For Fluid Flow Systems With and Without Static HeadDokument10 SeitenVariable Speed Pump Efficiency Calculation For Fluid Flow Systems With and Without Static HeadVũ Tuệ MinhNoch keine Bewertungen
- The Sound Collector - The Prepared Piano of John CageDokument12 SeitenThe Sound Collector - The Prepared Piano of John CageLuigie VazquezNoch keine Bewertungen
- Distinguish Between Tax and FeeDokument2 SeitenDistinguish Between Tax and FeeRishi Agarwal100% (1)
- Exor EPF-1032 DatasheetDokument2 SeitenExor EPF-1032 DatasheetElectromateNoch keine Bewertungen
- Environment ManagerDokument234 SeitenEnvironment ManagerAbhishek kumarNoch keine Bewertungen
- Supreme Court rules stabilization fees not trust fundsDokument8 SeitenSupreme Court rules stabilization fees not trust fundsNadzlah BandilaNoch keine Bewertungen
- IMM Indian Oil Case Group 3Dokument13 SeitenIMM Indian Oil Case Group 3Soniya AgnihotriNoch keine Bewertungen
- Electrosteel Castings Limited (ECL) - Technology That CaresDokument4 SeitenElectrosteel Castings Limited (ECL) - Technology That CaresUjjawal PrakashNoch keine Bewertungen
- Living Nonliving DeadDokument11 SeitenLiving Nonliving DeadArun AcharyaNoch keine Bewertungen
- Empowerment Technology Reviewer: First SemesterDokument5 SeitenEmpowerment Technology Reviewer: First SemesterNinayD.MatubisNoch keine Bewertungen
- Deep Groove Ball Bearings PDFDokument11 SeitenDeep Groove Ball Bearings PDFArpit VermaNoch keine Bewertungen
- TLE8 Q4 Week 8 As Food ProcessingDokument4 SeitenTLE8 Q4 Week 8 As Food ProcessingROSELLE CASELANoch keine Bewertungen
- Newcomers Guide To The Canadian Job MarketDokument47 SeitenNewcomers Guide To The Canadian Job MarketSS NairNoch keine Bewertungen
- School Quality Improvement System PowerpointDokument95 SeitenSchool Quality Improvement System PowerpointLong Beach PostNoch keine Bewertungen
- Driving Continuous Improvement by Developing and Leveraging Lean Key Performance IndicatorsDokument10 SeitenDriving Continuous Improvement by Developing and Leveraging Lean Key Performance IndicatorskellendadNoch keine Bewertungen