Das könnte Ihnen auch gefallen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Format For Progress Report Writing RP1Dokument2 SeitenFormat For Progress Report Writing RP1Harris EffendiNoch keine Bewertungen
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Nippon Paint Malaysia Produce Up To 85 Million Liters of Paint Annually. Export ProductDokument6 SeitenNippon Paint Malaysia Produce Up To 85 Million Liters of Paint Annually. Export Productmarz95Noch keine Bewertungen
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- AsaDokument35 SeitenAsamarz95Noch keine Bewertungen
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- BalDokument2 SeitenBalmarz95Noch keine Bewertungen
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- Front Cover - Lab Report - Cpe613Dokument1 SeiteFront Cover - Lab Report - Cpe613marz95Noch keine Bewertungen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Example Acceptance Offer - LETTERDokument1 SeiteExample Acceptance Offer - LETTERAnis FarhanahNoch keine Bewertungen
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Rubrics For Lab - Sept-Jan 2016Dokument3 SeitenRubrics For Lab - Sept-Jan 2016Salju PutihNoch keine Bewertungen
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Module 1Dokument40 SeitenModule 1zamirmusmanNoch keine Bewertungen
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- SENGEHDokument1 SeiteSENGEHMohammad AmmarNoch keine Bewertungen
- Experiment 2: Free and Force Vortex Table of ContentDokument33 SeitenExperiment 2: Free and Force Vortex Table of Contentmarz95Noch keine Bewertungen
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- 90732276-5406-4eba-aced-b5f73feb12e2Dokument15 Seiten90732276-5406-4eba-aced-b5f73feb12e2marz95Noch keine Bewertungen
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- Syafiqah Binti Abd Rahman 2013610506 EH2206BDokument5 SeitenSyafiqah Binti Abd Rahman 2013610506 EH2206Bmarz95Noch keine Bewertungen
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Alin 1 - Front PageDokument1 SeiteAlin 1 - Front Pagemarz95Noch keine Bewertungen
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
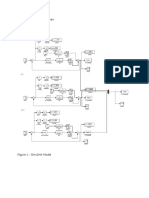
- LAB1 SimuliknkDokument1 SeiteLAB1 SimuliknkHisyamAl-MuhammadiNoch keine Bewertungen
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Front Cover - IndividualDokument1 SeiteFront Cover - Individualmarz95Noch keine Bewertungen
- Sample CalculationDokument3 SeitenSample Calculationmarz95Noch keine Bewertungen
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- Flow Over WeirsDokument16 SeitenFlow Over WeirsElina Nes100% (1)
- Sample CalculationDokument3 SeitenSample Calculationmarz95Noch keine Bewertungen
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Worked Solution Paper5 A LevelDokument8 SeitenWorked Solution Paper5 A LevelBhoosan AncharazNoch keine Bewertungen
- The DIRKS Methodology: A User GuideDokument285 SeitenThe DIRKS Methodology: A User GuideJesus Frontera100% (2)
- Thermodynamics WorksheetDokument5 SeitenThermodynamics WorksheetMalcolmJustMalcolmNoch keine Bewertungen
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- API RP 7C-11F Installation, Maintenance and Operation of Internal Combustion Engines.Dokument3 SeitenAPI RP 7C-11F Installation, Maintenance and Operation of Internal Combustion Engines.Rashid Ghani100% (1)
- Saudi Methanol Company (Ar-Razi) : Job Safety AnalysisDokument7 SeitenSaudi Methanol Company (Ar-Razi) : Job Safety AnalysisAnonymous voA5Tb0Noch keine Bewertungen
- Index: © Christopher Pitt 2018 C. Pitt, The Definitive Guide To AdonisjsDokument5 SeitenIndex: © Christopher Pitt 2018 C. Pitt, The Definitive Guide To AdonisjsZidi BoyNoch keine Bewertungen
- Affidavit of Co OwnershipDokument2 SeitenAffidavit of Co OwnershipEmer MartinNoch keine Bewertungen
- Coke Drum Repair Welch Aquilex WSI DCU Calgary 2009Dokument37 SeitenCoke Drum Repair Welch Aquilex WSI DCU Calgary 2009Oscar DorantesNoch keine Bewertungen
- BSRM Ultima BrochureDokument2 SeitenBSRM Ultima BrochuresaifuzzamanNoch keine Bewertungen
- Answer: C: Exam Name: Exam Type: Exam Code: Total QuestionsDokument26 SeitenAnswer: C: Exam Name: Exam Type: Exam Code: Total QuestionsMohammed S.GoudaNoch keine Bewertungen
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Overlay Control PlansDokument1 SeiteOverlay Control PlansSTS-SPARK GAMINGNoch keine Bewertungen
- Handbook of Storage Tank Systems: Codes, Regulations, and DesignsDokument4 SeitenHandbook of Storage Tank Systems: Codes, Regulations, and DesignsAndi RachmanNoch keine Bewertungen
- Solutions DPP 2Dokument3 SeitenSolutions DPP 2Tech. VideciousNoch keine Bewertungen
- Diesel Engines For Vehicles D2066 D2676Dokument6 SeitenDiesel Engines For Vehicles D2066 D2676Branislava Savic63% (16)
- An Analysis of Students' Error in Using Possesive Adjective in Their Online Writing TasksDokument19 SeitenAn Analysis of Students' Error in Using Possesive Adjective in Their Online Writing TasksKartika Dwi NurandaniNoch keine Bewertungen
- A. Computed Only For A 2x2 Table B. 0 Cells (,0%) Have Expected Count Less Than 5. The Minimum Expected Count Is 3,40Dokument1 SeiteA. Computed Only For A 2x2 Table B. 0 Cells (,0%) Have Expected Count Less Than 5. The Minimum Expected Count Is 3,40harvey777Noch keine Bewertungen
- Brain Injury Patients Have A Place To Be Themselves: WHY WHYDokument24 SeitenBrain Injury Patients Have A Place To Be Themselves: WHY WHYDonna S. SeayNoch keine Bewertungen
- Capgemini - 2012-06-13 - 2012 Analyst Day - 3 - Michelin - A Better Way ForwardDokument12 SeitenCapgemini - 2012-06-13 - 2012 Analyst Day - 3 - Michelin - A Better Way ForwardAvanish VermaNoch keine Bewertungen
- Optical Transport Network SwitchingDokument16 SeitenOptical Transport Network SwitchingNdambuki DicksonNoch keine Bewertungen
- Pen Pal Lesson Plan 3Dokument3 SeitenPen Pal Lesson Plan 3api-664582820Noch keine Bewertungen
- SL Generator Ultrasunete RincoDokument2 SeitenSL Generator Ultrasunete RincoDariaNoch keine Bewertungen
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Painters Rates PDFDokument86 SeitenPainters Rates PDFmanthoexNoch keine Bewertungen
- Current Harmonics: Electric Power System Power QualityDokument3 SeitenCurrent Harmonics: Electric Power System Power QualityAlliver SapitulaNoch keine Bewertungen
- CandyDokument24 SeitenCandySjdb FjfbNoch keine Bewertungen
- Kallatam of Kallatar (In Tamil Script Tscii Format)Dokument78 SeitenKallatam of Kallatar (In Tamil Script Tscii Format)rprabhuNoch keine Bewertungen
- FluteDokument13 SeitenFlutefisher3910% (1)
- Joomag 2020 06 12 27485398153Dokument2 SeitenJoomag 2020 06 12 27485398153Vincent Deodath Bang'araNoch keine Bewertungen
- Properties of WaterDokument23 SeitenProperties of WaterNiken Rumani100% (1)
- Vanguard 44 - Anti Tank Helicopters PDFDokument48 SeitenVanguard 44 - Anti Tank Helicopters PDFsoljenitsin250% (2)
- DL Manual - Com Vs Controller Gs Driver p100 Operating ManualDokument124 SeitenDL Manual - Com Vs Controller Gs Driver p100 Operating ManualThiago Teixeira PiresNoch keine Bewertungen