Das könnte Ihnen auch gefallen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Other 1Dokument3 SeitenOther 1Harish Kumar MNoch keine Bewertungen
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- Fcpf400N80Z: N-Channel Superfet Ii MosfetDokument10 SeitenFcpf400N80Z: N-Channel Superfet Ii MosfetHarish Kumar MNoch keine Bewertungen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- H2PowerToday1109 Design InnovatiaDokument4 SeitenH2PowerToday1109 Design InnovatiaHarish Kumar MNoch keine Bewertungen
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- H2PToday1902 - Design - TexasInstruments - Part 8Dokument8 SeitenH2PToday1902 - Design - TexasInstruments - Part 8Harish Kumar MNoch keine Bewertungen
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Intelligent Smart Home Automation and Security SysDokument6 SeitenIntelligent Smart Home Automation and Security SysHarish Kumar M100% (1)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Digital Signal ProcessingDokument2 SeitenDigital Signal ProcessingHarish Kumar MNoch keine Bewertungen
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Invisible Eye An Advanced Security System PDFDokument5 SeitenInvisible Eye An Advanced Security System PDFHarish Kumar MNoch keine Bewertungen
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- New Invisble Eye TechsDokument9 SeitenNew Invisble Eye TechsRejo georgeNoch keine Bewertungen
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Lm80 Webcast Q ADokument4 SeitenLm80 Webcast Q AHarish Kumar MNoch keine Bewertungen
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- lm80 Webcast - 10 30 08 PDFDokument34 Seitenlm80 Webcast - 10 30 08 PDFHarish Kumar MNoch keine Bewertungen
- Aluminum Electrolytic CapacitorsDokument29 SeitenAluminum Electrolytic CapacitorstekellamerZ aka tekellamerNoch keine Bewertungen
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Aluminium Electrolytic Capacitor CDE - AEappGuideDokument22 SeitenAluminium Electrolytic Capacitor CDE - AEappGuideHarish Kumar MNoch keine Bewertungen
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- BuzzerDokument1 SeiteBuzzerHarish Kumar MNoch keine Bewertungen
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- FL7733ADokument1 SeiteFL7733AHarish Kumar MNoch keine Bewertungen
- CC2 PDFDokument5 SeitenCC2 PDFHarish Kumar MNoch keine Bewertungen
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- SSL3250A: 1. General DescriptionDokument26 SeitenSSL3250A: 1. General DescriptionHarish Kumar MNoch keine Bewertungen
- DatasheetDokument3 SeitenDatasheetHarish Kumar MNoch keine Bewertungen
- RXD1 PDFDokument3 SeitenRXD1 PDFJuliana NepembeNoch keine Bewertungen
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- Z-Power LED Drivemanagement PDFDokument7 SeitenZ-Power LED Drivemanagement PDFHarish Kumar MNoch keine Bewertungen
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Datasheet PDFDokument2 SeitenDatasheet PDFHarish Kumar MNoch keine Bewertungen
- Avx Rad Cer ThomsonDokument10 SeitenAvx Rad Cer ThomsonΠΑΝΑΓΙΩΤΗΣΠΑΝΑΓΟΣNoch keine Bewertungen
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
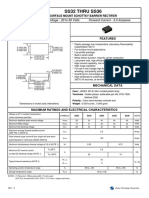
- Surface Mount Power Package: Semiconductor Technical DataDokument4 SeitenSurface Mount Power Package: Semiconductor Technical DataHarish Kumar MNoch keine Bewertungen
- Ss32 Thru Ss36: Reverse Voltage - 20 To 60 Volts Forward Current - 3.0 AmperesDokument2 SeitenSs32 Thru Ss36: Reverse Voltage - 20 To 60 Volts Forward Current - 3.0 AmperesHarish Kumar MNoch keine Bewertungen
- B 8002 C 6 D 3Dokument3 SeitenB 8002 C 6 D 3Harish Kumar MNoch keine Bewertungen
- Irlml 6402Dokument8 SeitenIrlml 6402Harish Kumar MNoch keine Bewertungen
- CC2 PDFDokument5 SeitenCC2 PDFHarish Kumar MNoch keine Bewertungen
- Irlml 6402Dokument8 SeitenIrlml 6402Harish Kumar MNoch keine Bewertungen
- Part NumberDokument4 SeitenPart NumberHarish Kumar MNoch keine Bewertungen
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- B 8087612 eDokument6 SeitenB 8087612 eInti SarNoch keine Bewertungen
- Downloaded From Manuals Search EngineDokument12 SeitenDownloaded From Manuals Search EngineHarish Kumar MNoch keine Bewertungen
- Indian Spices and Condaminents As Natural HealerDokument4 SeitenIndian Spices and Condaminents As Natural HealerRashi SaraogiNoch keine Bewertungen
- Spices Cryo-Grinding UnitDokument7 SeitenSpices Cryo-Grinding Unittadsrikanth_chainluNoch keine Bewertungen
- A Food Plan To Balance Kapha DoshaDokument6 SeitenA Food Plan To Balance Kapha DoshaDivya Shilpa RajeevNoch keine Bewertungen
- Factsheet ABSF Spices, Herbs and AromaticsDokument16 SeitenFactsheet ABSF Spices, Herbs and AromaticsadNoch keine Bewertungen
- ECE429 Laboratory 4 NAND Schematic: Bapu A20489420 21/09/2021Dokument14 SeitenECE429 Laboratory 4 NAND Schematic: Bapu A20489420 21/09/2021Prasanna NalawarNoch keine Bewertungen
- This Study Resource Was: Gourmet Garden RangeDokument3 SeitenThis Study Resource Was: Gourmet Garden RangeSunnyNoch keine Bewertungen
- Study On Production & Prospects of Exports of Spices From IndiaDokument19 SeitenStudy On Production & Prospects of Exports of Spices From IndiaVishwas JNoch keine Bewertungen
- .Spice Conversion To HindiDokument3 Seiten.Spice Conversion To HindiGood EveningNoch keine Bewertungen
- PROJECT REPORT Kartik BhardwajDokument63 SeitenPROJECT REPORT Kartik BhardwajKartik BhardwajNoch keine Bewertungen
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- The Frequency and ComplexityDokument10 SeitenThe Frequency and ComplexitytlnrsNoch keine Bewertungen
- For StudentsDokument13 SeitenFor StudentsDrHemant ShastryNoch keine Bewertungen
- EE105 - Fall 2015 Microelectronic Devices and Circuits: Prof. Ming C. Wu Wu@eecs - Berkeley.edu 511 Sutardja Dai Hall (SDH)Dokument14 SeitenEE105 - Fall 2015 Microelectronic Devices and Circuits: Prof. Ming C. Wu Wu@eecs - Berkeley.edu 511 Sutardja Dai Hall (SDH)Kulanthaivelu RamaswamyNoch keine Bewertungen
- Data Buyer 24 Oktober 22Dokument37 SeitenData Buyer 24 Oktober 22tazkiyaNoch keine Bewertungen
- Flavour of M. spices-STCDokument27 SeitenFlavour of M. spices-STCHrudyaSamhitaNoch keine Bewertungen
- Siliconsmart DsDokument3 SeitenSiliconsmart DsChuah Cheow ThengNoch keine Bewertungen
- Caserm/D: Publication Ordering InformationDokument326 SeitenCaserm/D: Publication Ordering InformationjohnNoch keine Bewertungen
- Agrawal - Marketing Assignment2Dokument12 SeitenAgrawal - Marketing Assignment2Priyanshu AgrawalNoch keine Bewertungen
- The MR Preva ExperimentDokument5 SeitenThe MR Preva ExperimentMihai Daniel100% (2)
- SeditDokument252 SeitenSeditRHRNoch keine Bewertungen
- Herbs PDFDokument168 SeitenHerbs PDFLise Satiro100% (5)
- Harga Herb and SpicesDokument2 SeitenHarga Herb and Spicesputu aprilyaniNoch keine Bewertungen
- An Introduction To HFSS OptimetricsDokument52 SeitenAn Introduction To HFSS OptimetricsdhruvaaaaaNoch keine Bewertungen
- SPICE - A Brief Overview-2Dokument7 SeitenSPICE - A Brief Overview-2josuemxNoch keine Bewertungen
- Section 1: Questions 1-9Dokument6 SeitenSection 1: Questions 1-9Ben SmirNoch keine Bewertungen
- Address Sourh No:Rrrl505A,: KeralaDokument16 SeitenAddress Sourh No:Rrrl505A,: KeralaRoshniNoch keine Bewertungen
- Project ON Entrepreneurship Developement: Women Entrepreneurs in Family Business (Sakthi Masala)Dokument17 SeitenProject ON Entrepreneurship Developement: Women Entrepreneurs in Family Business (Sakthi Masala)Manu K AnujanNoch keine Bewertungen
- Customs and Cuisine of Tanzania: by Linda Mcelroy, CuratorDokument5 SeitenCustoms and Cuisine of Tanzania: by Linda Mcelroy, CuratorAbisaiNoch keine Bewertungen
- Users GuideDokument155 SeitenUsers GuideAdrian Manuel Lopez AlmejoNoch keine Bewertungen
- Substrate Noise Analysis and Simulation With SubstrateStormDokument35 SeitenSubstrate Noise Analysis and Simulation With SubstrateStormapi-19668941Noch keine Bewertungen
- Swift PGA Filing Quick ReferencerDokument27 SeitenSwift PGA Filing Quick ReferencerM S VenkateshNoch keine Bewertungen
- INCOSE Systems Engineering Handbook: A Guide for System Life Cycle Processes and ActivitiesVon EverandINCOSE Systems Engineering Handbook: A Guide for System Life Cycle Processes and ActivitiesBewertung: 5 von 5 Sternen5/5 (1)
- Electronics All-in-One For Dummies, 3rd EditionVon EverandElectronics All-in-One For Dummies, 3rd EditionBewertung: 5 von 5 Sternen5/5 (2)
- Digital Filmmaking: The Ultimate Guide to Web Video Production for Beginners and Non-Professionals, Learn Useful Tips and Advice on How You Can Create, Film and Edit Your VideosVon EverandDigital Filmmaking: The Ultimate Guide to Web Video Production for Beginners and Non-Professionals, Learn Useful Tips and Advice on How You Can Create, Film and Edit Your VideosBewertung: 5 von 5 Sternen5/5 (1)
- Hacking Electronics: An Illustrated DIY Guide for Makers and HobbyistsVon EverandHacking Electronics: An Illustrated DIY Guide for Makers and HobbyistsBewertung: 3.5 von 5 Sternen3.5/5 (2)
- Practical Electrical Wiring: Residential, Farm, Commercial, and IndustrialVon EverandPractical Electrical Wiring: Residential, Farm, Commercial, and IndustrialBewertung: 3.5 von 5 Sternen3.5/5 (3)
- Analog Design and Simulation Using OrCAD Capture and PSpiceVon EverandAnalog Design and Simulation Using OrCAD Capture and PSpiceNoch keine Bewertungen