Das könnte Ihnen auch gefallen
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Activa NewDokument160 SeitenActiva NewSiddharth Jain100% (1)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5795)
- 5 6176700143207711706Dokument198 Seiten5 6176700143207711706abc defNoch keine Bewertungen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Operate A Personal Computer PDFDokument56 SeitenOperate A Personal Computer PDFBirhanu Girmay100% (8)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- SA Flight Instructors Training ProceduresDokument371 SeitenSA Flight Instructors Training ProceduresGuilioNoch keine Bewertungen
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- University of Mumbai: Syllabus For Sem V & VI Program: B.Sc. Course: PhysicsDokument18 SeitenUniversity of Mumbai: Syllabus For Sem V & VI Program: B.Sc. Course: Physicsdbhansali57Noch keine Bewertungen
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- Overview On Sourcing: Oracle Fusion: 21D UpdatesDokument24 SeitenOverview On Sourcing: Oracle Fusion: 21D UpdatesMathi VathaniNoch keine Bewertungen
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Crisfield - Vol1 - NonLinear Finite Element Analysis of Solids and Structures EssentialsDokument360 SeitenCrisfield - Vol1 - NonLinear Finite Element Analysis of Solids and Structures EssentialsAnonymous eCD5ZRNoch keine Bewertungen
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- 3 3 1 Material Sorter Design ChallengeDokument3 Seiten3 3 1 Material Sorter Design Challengeapi-343534512Noch keine Bewertungen
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Simple and Compound Gear TrainDokument2 SeitenSimple and Compound Gear TrainHendri Yoga SaputraNoch keine Bewertungen
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- A New Finite Element Based On The Strain Approach For Linear and Dynamic AnalysisDokument6 SeitenA New Finite Element Based On The Strain Approach For Linear and Dynamic AnalysisHako KhechaiNoch keine Bewertungen
- Iso 9974-2Dokument4 SeitenIso 9974-2willianNoch keine Bewertungen
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- GFF (T) ... MenglischNANNI (DMG-39 25.11.05) PDFDokument38 SeitenGFF (T) ... MenglischNANNI (DMG-39 25.11.05) PDFjuricic2100% (2)
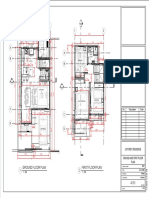
- Floor Plans & ElevationsDokument6 SeitenFloor Plans & Elevationsbryan cardonaNoch keine Bewertungen
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- DualityDokument27 SeitenDualitySuprabhat TiwariNoch keine Bewertungen
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Jrules Installation onWEBSPHEREDokument196 SeitenJrules Installation onWEBSPHEREjagr123Noch keine Bewertungen
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- CatalogDokument76 SeitenCatalogmkpasha55mpNoch keine Bewertungen
- Paper AeroplaneDokument19 SeitenPaper Aeroplanejkb SudhakarNoch keine Bewertungen
- RE 2017 EOT Brochure 4ADokument20 SeitenRE 2017 EOT Brochure 4AOrangutan SolutionsNoch keine Bewertungen
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- 12.5 Worksheet: Direct VariationDokument4 Seiten12.5 Worksheet: Direct VariationMarian NeldNoch keine Bewertungen
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- QAP For Conical StrainerDokument2 SeitenQAP For Conical StrainersatishchidrewarNoch keine Bewertungen
- Apple A9Dokument10 SeitenApple A9Savithri NandadasaNoch keine Bewertungen
- Communicating With Instromet Q-Sonic Ultrasonic Gas FlowmetersDokument13 SeitenCommunicating With Instromet Q-Sonic Ultrasonic Gas Flowmeterssyed jeelani ahmedNoch keine Bewertungen
- CP 001 - 18 - PP - Eng - 00 - CP Umk450t (2018) 18VR5K01 (Eng)Dokument52 SeitenCP 001 - 18 - PP - Eng - 00 - CP Umk450t (2018) 18VR5K01 (Eng)Honda almagrorepuestosNoch keine Bewertungen
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Build A 10 Ton Hydraulic PressDokument10 SeitenBuild A 10 Ton Hydraulic PressManuel SterlingNoch keine Bewertungen
- ARMY TM 9-1804 Power Train Body Frame .25ton 4X4 Truck M38 Jul52Dokument206 SeitenARMY TM 9-1804 Power Train Body Frame .25ton 4X4 Truck M38 Jul52RockWagon100% (2)
- Rankel Engine.Dokument16 SeitenRankel Engine.Divya Prakash SrivastavaNoch keine Bewertungen
- Session PlanDokument11 SeitenSession PlanMat Domdom Sansano100% (1)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- General Construction Notes: FC Engineering ServicesDokument1 SeiteGeneral Construction Notes: FC Engineering ServicesMac KYNoch keine Bewertungen
- Desmophen 1200 - en - 00134597 17947398 20766463Dokument3 SeitenDesmophen 1200 - en - 00134597 17947398 20766463Sabri AeroChemNoch keine Bewertungen
- Mumbai BylawsDokument110 SeitenMumbai BylawsLokesh SharmaNoch keine Bewertungen
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)