Das könnte Ihnen auch gefallen
- Meshless - Science DirectDokument13 SeitenMeshless - Science Directenatt2012Noch keine Bewertungen
- The Mimetic Finite Difference Method for Elliptic ProblemsVon EverandThe Mimetic Finite Difference Method for Elliptic ProblemsNoch keine Bewertungen
- Variational Methods for Boundary Value Problems for Systems of Elliptic EquationsVon EverandVariational Methods for Boundary Value Problems for Systems of Elliptic EquationsNoch keine Bewertungen
- Meshless Methods1Dokument4 SeitenMeshless Methods1herevenkatNoch keine Bewertungen
- Operators Between Sequence Spaces and ApplicationsVon EverandOperators Between Sequence Spaces and ApplicationsNoch keine Bewertungen
- Multilevel Quasiseparable Matrices in PDE-constrained OptimizationDokument20 SeitenMultilevel Quasiseparable Matrices in PDE-constrained OptimizationAsya SobolevskayaNoch keine Bewertungen
- Semi-Analytical Solution of 2-D Elasticity Problems by The Strip Distributed Transfer Function MethodDokument23 SeitenSemi-Analytical Solution of 2-D Elasticity Problems by The Strip Distributed Transfer Function MethodGabriel SaavedraNoch keine Bewertungen
- Calculating Dispersion Derivatives in Fiber Optic Design: Linda KaufmanDokument8 SeitenCalculating Dispersion Derivatives in Fiber Optic Design: Linda KaufmanXuan Nguyen QuangNoch keine Bewertungen
- Art19 Modelo Ede EspesadorDokument32 SeitenArt19 Modelo Ede EspesadorCarlos de la TorreNoch keine Bewertungen
- The Approximation of The Maxwell Eigenvalue Problem Using A Least-Squares MethodDokument24 SeitenThe Approximation of The Maxwell Eigenvalue Problem Using A Least-Squares MethoddurgaraokamireddyNoch keine Bewertungen
- 2order D CorrectedDokument32 Seiten2order D CorrectedslirpaNoch keine Bewertungen
- Theoretical Analysis of Numerical Integration in Galerkin Meshless MethodsDokument22 SeitenTheoretical Analysis of Numerical Integration in Galerkin Meshless MethodsDheeraj_GopalNoch keine Bewertungen
- A Fully Coupled Finite Volume Solver For The Solution of Incompressible Flows On Locally Refined Non-Matching Block-Structured GridsDokument12 SeitenA Fully Coupled Finite Volume Solver For The Solution of Incompressible Flows On Locally Refined Non-Matching Block-Structured GridsErnesto Delfino AguirreNoch keine Bewertungen
- FDM, Fem, FVMDokument32 SeitenFDM, Fem, FVMRaj EaswarmoorthiNoch keine Bewertungen
- Finite Element MethodDokument37 SeitenFinite Element Methodaditya2053Noch keine Bewertungen
- A Fitted Numerical Scheme With Algorithm For Singularly Perturbed Parabolic Partial Differential Equations With Large Negative ShiftDokument18 SeitenA Fitted Numerical Scheme With Algorithm For Singularly Perturbed Parabolic Partial Differential Equations With Large Negative ShiftMS VictorNoch keine Bewertungen
- A Study of Effective Moment of Inertia Models For Full-Scale Reinforced Concrete T-Beams Subjected To A Tandem-Axle Load ConfigurationDokument19 SeitenA Study of Effective Moment of Inertia Models For Full-Scale Reinforced Concrete T-Beams Subjected To A Tandem-Axle Load ConfigurationPhay gaen CH - K24Noch keine Bewertungen
- An Introduction To Finite Element Methods: Jass 05 Seminar: Interplay of Mathematical Modeling and Numerical SimulationDokument16 SeitenAn Introduction To Finite Element Methods: Jass 05 Seminar: Interplay of Mathematical Modeling and Numerical Simulationaviraj2006Noch keine Bewertungen
- Blow-up Theory for Elliptic PDEs in Riemannian Geometry (MN-45)Von EverandBlow-up Theory for Elliptic PDEs in Riemannian Geometry (MN-45)Noch keine Bewertungen
- Smo1264 ImortantDokument15 SeitenSmo1264 ImortantalgwaalNoch keine Bewertungen
- Multi-Scale Failure For Heterogeneous Materials: Link With Morphological Modeling - Complas XiDokument12 SeitenMulti-Scale Failure For Heterogeneous Materials: Link With Morphological Modeling - Complas XiRajesh ChowdaryNoch keine Bewertungen
- SUPERTORSION - 0407244v3Dokument34 SeitenSUPERTORSION - 0407244v3dan7maxNoch keine Bewertungen
- Finite Elements Approaches in The Solution of Field Functions in Multidimensional Space: A Case of Boundary Value ProblemsDokument31 SeitenFinite Elements Approaches in The Solution of Field Functions in Multidimensional Space: A Case of Boundary Value Problemscaojin259Noch keine Bewertungen
- Finite Difference, Finite Element, and Finite Volume Method: January 2005Dokument33 SeitenFinite Difference, Finite Element, and Finite Volume Method: January 2005Amanuel GirmaNoch keine Bewertungen
- Difference Equations in Normed Spaces: Stability and OscillationsVon EverandDifference Equations in Normed Spaces: Stability and OscillationsNoch keine Bewertungen
- Conformal EquivalenceDokument11 SeitenConformal EquivalenceRac RayNoch keine Bewertungen
- COMSOL Conf CardiffDokument8 SeitenCOMSOL Conf CardiffLexin LiNoch keine Bewertungen
- Linear Algebra and Linear Operators in Engineering: With Applications in Mathematica®Von EverandLinear Algebra and Linear Operators in Engineering: With Applications in Mathematica®Noch keine Bewertungen
- A Multiscale Finite ElementDokument21 SeitenA Multiscale Finite ElementZeljko LazarevicNoch keine Bewertungen
- Introduction To Finite Element AnalysisDokument20 SeitenIntroduction To Finite Element AnalysisVishnu Vardhan Reddy GangapuramNoch keine Bewertungen
- Daniel Neuhauser and Roi Baer - A Two-Grid Time-Dependent Formalism For The Maxwell EquationDokument10 SeitenDaniel Neuhauser and Roi Baer - A Two-Grid Time-Dependent Formalism For The Maxwell EquationPrem_SwiftNoch keine Bewertungen
- High Order Cut Finite Element Methods For The Stokes ProblemDokument22 SeitenHigh Order Cut Finite Element Methods For The Stokes ProblemTạ Đức HuyNoch keine Bewertungen
- On The Convergence of A Non-Incremental Homogenization Method For Nonlinear Elastic Composite MaterialsDokument21 SeitenOn The Convergence of A Non-Incremental Homogenization Method For Nonlinear Elastic Composite Materialsgego2Noch keine Bewertungen
- Finite Difference, Finite Element, and Finite Volume Method: January 2005Dokument33 SeitenFinite Difference, Finite Element, and Finite Volume Method: January 2005yohannesNoch keine Bewertungen
- 1 s2.0 S0096300316302673 MainDokument16 Seiten1 s2.0 S0096300316302673 Mainjoginder singhNoch keine Bewertungen
- Matlab Differentiation Matrix SuiteDokument55 SeitenMatlab Differentiation Matrix SuiteRaghav VenkatNoch keine Bewertungen
- Evgeny V. Doktorov, Vassilis M. Rothos and Yuri S. Kivshar - Full-Time Dynamics of Modulational Instability in Spinor Bose-Einstein CondensatesDokument6 SeitenEvgeny V. Doktorov, Vassilis M. Rothos and Yuri S. Kivshar - Full-Time Dynamics of Modulational Instability in Spinor Bose-Einstein CondensatesPomac232Noch keine Bewertungen
- (348490223) FEA-NotesDokument22 Seiten(348490223) FEA-Notesonezero111100% (1)
- Peter Kosmol, Dieter Muller-Wichards-Optimization in Function Spaces - With Stability Considerations in Orlicz Spaces (De Gruyter Series in NonlineDokument405 SeitenPeter Kosmol, Dieter Muller-Wichards-Optimization in Function Spaces - With Stability Considerations in Orlicz Spaces (De Gruyter Series in NonlineSonia AcinasNoch keine Bewertungen
- Convergence of Dynamics On Inductive Systems of Banach SpacesDokument56 SeitenConvergence of Dynamics On Inductive Systems of Banach SpacesLiliana GuranNoch keine Bewertungen
- Efg 1Dokument41 SeitenEfg 1malenenivamsiNoch keine Bewertungen
- QM Meshes 1986Dokument20 SeitenQM Meshes 1986TimKellerNoch keine Bewertungen
- Applied Mathematical Modelling: M. Hadizadeh, S. YazdaniDokument9 SeitenApplied Mathematical Modelling: M. Hadizadeh, S. YazdaniHo Nhat NamNoch keine Bewertungen
- A Muscl Method Satisfying All The Numerical Entropy InequalitiesDokument23 SeitenA Muscl Method Satisfying All The Numerical Entropy InequalitiesAnibal Coronel PerezNoch keine Bewertungen
- A General Finite Difference Method For Arbitrary MeshesDokument13 SeitenA General Finite Difference Method For Arbitrary MeshesKemer NogueraNoch keine Bewertungen
- Received 10 April 1997. Read 16 March 1997. Published 30 December 1998.Dokument18 SeitenReceived 10 April 1997. Read 16 March 1997. Published 30 December 1998.Tg WallasNoch keine Bewertungen
- Math of Comp 04Dokument31 SeitenMath of Comp 04slirpaNoch keine Bewertungen
- Discontinuous Finite Difference and Spectral Methods For Self Force ApplicationsDokument29 SeitenDiscontinuous Finite Difference and Spectral Methods For Self Force ApplicationsbabistokasNoch keine Bewertungen
- Basic Structured Grid Generation: With an introduction to unstructured grid generationVon EverandBasic Structured Grid Generation: With an introduction to unstructured grid generationNoch keine Bewertungen
- Time Harmonic Maxwell EqDokument16 SeitenTime Harmonic Maxwell Eqawais4125Noch keine Bewertungen
- John B. Etnyre and Robert W. Ghrist - Stratified Integrals and Unkots in Inviscid FlowsDokument13 SeitenJohn B. Etnyre and Robert W. Ghrist - Stratified Integrals and Unkots in Inviscid FlowsPlamcfeNoch keine Bewertungen
- IJNME Eigenvalues RevDokument32 SeitenIJNME Eigenvalues RevAdenilson SwokowskiNoch keine Bewertungen
- Tensorial Approach Kurganov TadmorDokument12 SeitenTensorial Approach Kurganov TadmorDenis_LNoch keine Bewertungen
- Journal of Computational Physics: Armando Coco, Giovanni RussoDokument38 SeitenJournal of Computational Physics: Armando Coco, Giovanni RussoAnonymous tIwg2AyNoch keine Bewertungen
- Johannsen 2002Dokument8 SeitenJohannsen 2002ALEJANDRO GANCEDO TORALNoch keine Bewertungen
- A Higher-Order Structure Tensor: Thomas Schultz, Joachim Weickert, and Hans-Peter SeidelDokument29 SeitenA Higher-Order Structure Tensor: Thomas Schultz, Joachim Weickert, and Hans-Peter SeidelMay Nicolas100% (1)
- ECON 401/601, Microeconomic Theory 3/micro 1: Jean Guillaume Forand Fall 2019, WaterlooDokument3 SeitenECON 401/601, Microeconomic Theory 3/micro 1: Jean Guillaume Forand Fall 2019, WaterlooTarun SharmaNoch keine Bewertungen
- BS7430 Earthing CalculationDokument14 SeitenBS7430 Earthing CalculationgyanNoch keine Bewertungen
- BS 07533-3-1997Dokument21 SeitenBS 07533-3-1997Ali RayyaNoch keine Bewertungen
- Agenda - Meeting SLC (LT) - 27.06.2014 PDFDokument27 SeitenAgenda - Meeting SLC (LT) - 27.06.2014 PDFharshal1223Noch keine Bewertungen
- Hayek - Planning, Science, and Freedom (1941)Dokument5 SeitenHayek - Planning, Science, and Freedom (1941)Robert Wenzel100% (1)
- Overview of MEMDokument5 SeitenOverview of MEMTudor Costin100% (1)
- IPHPDokument4 SeitenIPHPAliah CasilangNoch keine Bewertungen
- Feasibility and Optimization of Dissimilar Laser Welding ComponentsDokument366 SeitenFeasibility and Optimization of Dissimilar Laser Welding Componentskaliappan45490Noch keine Bewertungen
- 1974 - Roncaglia - The Reduction of Complex LabourDokument12 Seiten1974 - Roncaglia - The Reduction of Complex LabourRichardNoch keine Bewertungen
- Gr. 10 Persuasive EssayDokument22 SeitenGr. 10 Persuasive EssayZephania JandayanNoch keine Bewertungen
- SR# Call Type A-Party B-Party Date & Time Duration Cell ID ImeiDokument12 SeitenSR# Call Type A-Party B-Party Date & Time Duration Cell ID ImeiSaifullah BalochNoch keine Bewertungen
- Relay G30 ManualDokument42 SeitenRelay G30 ManualLeon KhiuNoch keine Bewertungen
- 3.1 MuazuDokument8 Seiten3.1 MuazuMon CastrNoch keine Bewertungen
- Climatol GuideDokument40 SeitenClimatol GuideFressiaNoch keine Bewertungen
- Aerated Concrete Production Using Various Raw MaterialsDokument5 SeitenAerated Concrete Production Using Various Raw Materialskinley dorjee100% (1)
- HyperconnectivityDokument5 SeitenHyperconnectivityramNoch keine Bewertungen
- Corometrics 170 Series BrochureDokument3 SeitenCorometrics 170 Series BrochureCesar MolanoNoch keine Bewertungen
- Surge Arrester PresentationDokument63 SeitenSurge Arrester PresentationRamiro FelicianoNoch keine Bewertungen
- Time Table & Instruction For Candidate - Faculty of Sci & TechDokument3 SeitenTime Table & Instruction For Candidate - Faculty of Sci & TechDeepshikha Mehta joshiNoch keine Bewertungen
- All Papers of Thermodyanmics and Heat TransferDokument19 SeitenAll Papers of Thermodyanmics and Heat TransfervismayluhadiyaNoch keine Bewertungen
- Advanced Work Packaging: A Fit For Purpose ApproachDokument17 SeitenAdvanced Work Packaging: A Fit For Purpose Approachhafidz bandungNoch keine Bewertungen
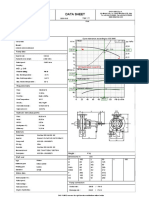
- Data Sheet: Item N°: Curve Tolerance According To ISO 9906Dokument3 SeitenData Sheet: Item N°: Curve Tolerance According To ISO 9906Aan AndianaNoch keine Bewertungen
- EE360 - Magnetic CircuitsDokument48 SeitenEE360 - Magnetic Circuitsبدون اسمNoch keine Bewertungen
- Activity 2Dokument5 SeitenActivity 2DIOSAY, CHELZEYA A.Noch keine Bewertungen
- Business Logic Module 1Dokument5 SeitenBusiness Logic Module 1Cassandra VenecarioNoch keine Bewertungen
- RV900S - IB - Series 3Dokument28 SeitenRV900S - IB - Series 3GA LewisNoch keine Bewertungen
- LITERARY THEORY BY TERRY EAGLETON NotesDokument6 SeitenLITERARY THEORY BY TERRY EAGLETON NotesPrachi SharmaNoch keine Bewertungen
- ER288 090714 5082 CV OKP (089) Method Statement For Plate Baring TestDokument3 SeitenER288 090714 5082 CV OKP (089) Method Statement For Plate Baring TestWr ArNoch keine Bewertungen
- Proposed Multimodal Terminal: Architect Rosauro H. Jamandri, M. ArchDokument7 SeitenProposed Multimodal Terminal: Architect Rosauro H. Jamandri, M. Archpepito manalotoNoch keine Bewertungen
- Effect of IctDokument10 SeitenEffect of IctRVID PhNoch keine Bewertungen