Das könnte Ihnen auch gefallen
- Modern Control of DC-Based Power Systems: A Problem-Based ApproachVon EverandModern Control of DC-Based Power Systems: A Problem-Based ApproachNoch keine Bewertungen
- Variable Speed DriveDokument66 SeitenVariable Speed DriveRamaNoch keine Bewertungen
- Variable Speed Drive - IntroductionDokument6 SeitenVariable Speed Drive - Introductionawhk2006Noch keine Bewertungen
- Investigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsVon EverandInvestigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsNoch keine Bewertungen
- SMPC NotesDokument98 SeitenSMPC NotesHarsha Anantwar100% (1)
- Real-Time Simulation Technology for Modern Power ElectronicsVon EverandReal-Time Simulation Technology for Modern Power ElectronicsNoch keine Bewertungen
- International Refereed Journal of Engineering and Science (IRJES)Dokument8 SeitenInternational Refereed Journal of Engineering and Science (IRJES)www.irjes.comNoch keine Bewertungen
- Vector Control of Ac DrivesDokument61 SeitenVector Control of Ac Drivessureshy-ee213Noch keine Bewertungen
- Power-system protection A Complete GuideVon EverandPower-system protection A Complete GuideBewertung: 1 von 5 Sternen1/5 (1)
- Effect of Source InductanceDokument25 SeitenEffect of Source InductanceSriram Anil Kumar Gandham100% (1)
- Electrical Overstress (EOS): Devices, Circuits and SystemsVon EverandElectrical Overstress (EOS): Devices, Circuits and SystemsNoch keine Bewertungen
- Synchronous Motor Drives: Open Loop V/F Control of Synchronous MotorDokument11 SeitenSynchronous Motor Drives: Open Loop V/F Control of Synchronous MotorSaish Dalvi100% (1)
- Oil Tester - Oil Breakdown Voltage (BDV) Tester - Power ElectronicalDokument2 SeitenOil Tester - Oil Breakdown Voltage (BDV) Tester - Power Electronicalmustafa1805100% (1)
- Zab Abb Unitrol 1010 1020 e RevaDokument12 SeitenZab Abb Unitrol 1010 1020 e RevaGavinsiauNoch keine Bewertungen
- E300 Electronic OverloadDokument36 SeitenE300 Electronic OverloadIsraelNoch keine Bewertungen
- Transformadores de Instrumento AT PDFDokument72 SeitenTransformadores de Instrumento AT PDFAlbino Calderon MendezNoch keine Bewertungen
- Artificial Loading of Induction MotorsDokument6 SeitenArtificial Loading of Induction Motorsamkeew100% (1)
- SCOPE Kit CRM - 200B ManualDokument4 SeitenSCOPE Kit CRM - 200B Manualsatheskumark26100% (1)
- Shunt Reactor 0420101Dokument16 SeitenShunt Reactor 0420101emy1188Noch keine Bewertungen
- Design Calculations For Buck-Boost Converters: Michael Green Advanced Low Power SolutionsDokument12 SeitenDesign Calculations For Buck-Boost Converters: Michael Green Advanced Low Power SolutionsnandhakumarmeNoch keine Bewertungen
- PLC & 8051Dokument22 SeitenPLC & 8051Sunil Patel100% (1)
- SECTION 16220 Motors and Generators, Rev 0Dokument34 SeitenSECTION 16220 Motors and Generators, Rev 0cherif yahyaouiNoch keine Bewertungen
- Synopsis Proposal For 2021Dokument4 SeitenSynopsis Proposal For 20212k18-EE-243 Vethushan VinnayagamoorththiNoch keine Bewertungen
- RLC 1st ManualDokument141 SeitenRLC 1st Manualjaved shaikh chaandNoch keine Bewertungen
- Chapter 8-Vector Control of Induction Motors PDFDokument18 SeitenChapter 8-Vector Control of Induction Motors PDFŞehriban YalçınNoch keine Bewertungen
- HPED Assignment 2: DC DrivesDokument4 SeitenHPED Assignment 2: DC DrivesShadNoch keine Bewertungen
- Vector Control of Induction MotorDokument10 SeitenVector Control of Induction MotorRam Uday MandalNoch keine Bewertungen
- Torsion Testing MachineDokument5 SeitenTorsion Testing Machinegosaye desalegnNoch keine Bewertungen
- Generac - Gen Insulation ClassDokument4 SeitenGenerac - Gen Insulation Class6609503100% (1)
- Arduino Based DC Motor Speed ControlDokument12 SeitenArduino Based DC Motor Speed Controlprabhu rachutiNoch keine Bewertungen
- LC5296 LC5296-H 5006RN LC5248E User Manual PDFDokument36 SeitenLC5296 LC5296-H 5006RN LC5248E User Manual PDFPankaj MauryaNoch keine Bewertungen
- Design and Micro Controller Implementation of A Three Phase SCR Power ConverterDokument8 SeitenDesign and Micro Controller Implementation of A Three Phase SCR Power ConverterIsmael Ochoa JimenezNoch keine Bewertungen
- Brushless Sensor ConfigDokument11 SeitenBrushless Sensor ConfigAlexandru TimofteNoch keine Bewertungen
- HECI Gov v1-1-PLC TG PDFDokument4 SeitenHECI Gov v1-1-PLC TG PDFbacuoc.nguyen356Noch keine Bewertungen
- Analysis of Chopper Fed D.C. Drive With PWM & Hysteresis Current Control SchemeDokument8 SeitenAnalysis of Chopper Fed D.C. Drive With PWM & Hysteresis Current Control SchemeS Bharadwaj ReddyNoch keine Bewertungen
- Power Rectifier ASIC ControllerDokument5 SeitenPower Rectifier ASIC ControllerQuang TaNoch keine Bewertungen
- Ezct-Ezct2k Truns Ratio Testing Notes Rev 2Dokument12 SeitenEzct-Ezct2k Truns Ratio Testing Notes Rev 2hizbi7Noch keine Bewertungen
- TP 1800 DC-DC Converter For Hybrid Electric Vehicle and EV ArrowTimesDokument7 SeitenTP 1800 DC-DC Converter For Hybrid Electric Vehicle and EV ArrowTimespapipapii100% (1)
- OLTCDokument4 SeitenOLTCGiwrgos GewrgiadisNoch keine Bewertungen
- Analysis and Design of Power Electronic Transformer For Medium Voltage LevelsDokument5 SeitenAnalysis and Design of Power Electronic Transformer For Medium Voltage LevelsSobia SaadiaNoch keine Bewertungen
- Current SensingDokument6 SeitenCurrent Sensingboslim1580Noch keine Bewertungen
- Transformer Tap ChangerDokument8 SeitenTransformer Tap ChangerNikolai MactavishNoch keine Bewertungen
- Automation Studio One-Line Electrotechnical GuideDokument69 SeitenAutomation Studio One-Line Electrotechnical GuideAlexandre Marchiote100% (1)
- Scope: Surge Arrester Leakage Current AnalyserDokument6 SeitenScope: Surge Arrester Leakage Current AnalyserEMD NSPCLNoch keine Bewertungen
- Qualitrol-Hathaway DFR-1200 Master ProtocolDokument14 SeitenQualitrol-Hathaway DFR-1200 Master ProtocolJOSENoch keine Bewertungen
- Solid State Drives Short BookDokument48 SeitenSolid State Drives Short BookGomathi Raja MNoch keine Bewertungen
- Door Monitor ProjectDokument4 SeitenDoor Monitor Projectlekhs_tim10% (1)
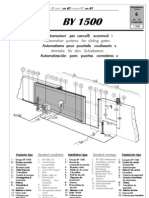
- Automation Systems For Sliding Gates Antriebe Für Den SchiebetoreDokument16 SeitenAutomation Systems For Sliding Gates Antriebe Für Den SchiebetorejovandjNoch keine Bewertungen
- Saral: Compact, Accurate and ReliableDokument2 SeitenSaral: Compact, Accurate and ReliableBalendraShahNoch keine Bewertungen
- Combine TRDokument8 SeitenCombine TRAchmad ZulkifliNoch keine Bewertungen
- HCNR200 Application NoteDokument10 SeitenHCNR200 Application NoteLogan JohnsonNoch keine Bewertungen
- EZCT-2000: Digital Current-Transformer Tester User'S ManualDokument68 SeitenEZCT-2000: Digital Current-Transformer Tester User'S ManuallocthaiquocNoch keine Bewertungen
- Rudolf: Digital Panel MetersDokument2 SeitenRudolf: Digital Panel MetersSantoso MBantulNoch keine Bewertungen
- Brochures PDFDokument11 SeitenBrochures PDFFiroDjinsoNanoNoch keine Bewertungen
- Isolation Transformers Reduce Drive Neutral Point VoltageDokument5 SeitenIsolation Transformers Reduce Drive Neutral Point Voltagescrib_111Noch keine Bewertungen
- Parameter Identification and Comparision of An Induction Motor ModelsDokument11 SeitenParameter Identification and Comparision of An Induction Motor ModelsJUAN4201Noch keine Bewertungen
- Electrical MeasurementsDokument3 SeitenElectrical MeasurementsSiva Prasad Padilam0% (1)
- SLUP079Dokument46 SeitenSLUP079bookreader1968Noch keine Bewertungen
- Yanbu WWTW Process Group PresentationDokument52 SeitenYanbu WWTW Process Group Presentationyxp2237Noch keine Bewertungen
- ZCV Installation ManualDokument15 SeitenZCV Installation Manualyxp2237Noch keine Bewertungen
- CSE PP Lightning Protection PDFDokument3 SeitenCSE PP Lightning Protection PDFyxp2237Noch keine Bewertungen
- Load Break Switch VS Circuit BreakerDokument1 SeiteLoad Break Switch VS Circuit Breakeryxp2237Noch keine Bewertungen
- PAC Control PhilosophyDokument9 SeitenPAC Control Philosophyyxp2237Noch keine Bewertungen
- General Specification For Electrical Installation in Government Buildings of The Hong Kong Special Administrative Region 2012 EditionDokument21 SeitenGeneral Specification For Electrical Installation in Government Buildings of The Hong Kong Special Administrative Region 2012 Editionyxp2237Noch keine Bewertungen
- G3 - DR - 12 Tigers in TroubleDokument8 SeitenG3 - DR - 12 Tigers in Troubleyxp2237Noch keine Bewertungen
- Lack of Sleep Blights Pupils' Education: by Sean CoughlanDokument7 SeitenLack of Sleep Blights Pupils' Education: by Sean Coughlanyxp2237Noch keine Bewertungen
- G3 - DR - 11 The Missing CapDokument8 SeitenG3 - DR - 11 The Missing Capyxp2237Noch keine Bewertungen
- Power Supply SystemDokument4 SeitenPower Supply Systemyxp2237Noch keine Bewertungen
- BL 982411-0 BL 982411-1 Panel-Mounted ORP Indicators & ControllersDokument2 SeitenBL 982411-0 BL 982411-1 Panel-Mounted ORP Indicators & ControllersHung TaNoch keine Bewertungen
- Lmr14203 Simple Switcher 42vin, 0.3A Step-Down Voltage Regulator in SOT-23Dokument18 SeitenLmr14203 Simple Switcher 42vin, 0.3A Step-Down Voltage Regulator in SOT-23Sebastiao RochaNoch keine Bewertungen
- Single P-Channel Trench MOSFET, - 30V, - 11A, 17m: General Description FeaturesDokument6 SeitenSingle P-Channel Trench MOSFET, - 30V, - 11A, 17m: General Description FeaturesdungNoch keine Bewertungen
- Calibration and Repair For Bird Wattmeter ElementsDokument1 SeiteCalibration and Repair For Bird Wattmeter Elementsraan4Noch keine Bewertungen
- Corn Mill Case StudyDokument2 SeitenCorn Mill Case StudyENRIQUENoch keine Bewertungen
- How To Use Digital MultimeterDokument23 SeitenHow To Use Digital Multimeternafees100% (2)
- 08 Buylog LVPowerInsulatedCaseCircBrkrsDokument184 Seiten08 Buylog LVPowerInsulatedCaseCircBrkrsJosé CamposNoch keine Bewertungen
- Huawei BTS3900A Installation Guide V1.0Dokument29 SeitenHuawei BTS3900A Installation Guide V1.0Ganidu Rochana100% (2)
- EP Lab Manual Group B - DanielHubDokument56 SeitenEP Lab Manual Group B - DanielHubM Chandraman ECE KIOTNoch keine Bewertungen
- Expr4 EelabDokument6 SeitenExpr4 EelabCenk DenizNoch keine Bewertungen
- 4 Low Voltage Switchboard Partitioning Forms Defined by IEC 61439-2Dokument5 Seiten4 Low Voltage Switchboard Partitioning Forms Defined by IEC 61439-2bambangNoch keine Bewertungen
- 1 Phase 2010 Cantoni MotorDokument12 Seiten1 Phase 2010 Cantoni MotorfelgiudceNoch keine Bewertungen
- Mini BCH Make Limit SwitchesDokument6 SeitenMini BCH Make Limit SwitchesAbhinay SuratkarNoch keine Bewertungen
- Tig Cerbera PDFDokument43 SeitenTig Cerbera PDFDonatas VaNoch keine Bewertungen
- Resolver (Electrical) - ..Dokument3 SeitenResolver (Electrical) - ..irmadhikaraNoch keine Bewertungen
- Manual de Servicio Montacargas MitsubishI Modelo ESR23N2 36 4Dokument25 SeitenManual de Servicio Montacargas MitsubishI Modelo ESR23N2 36 4Ulises Raul JimenezNoch keine Bewertungen
- Type Test 1Dokument40 SeitenType Test 1Phát LộcNoch keine Bewertungen
- Power Transformer TestDokument27 SeitenPower Transformer Testm khNoch keine Bewertungen
- 177 Modern Transistor Circuits ForbeginnersDokument43 Seiten177 Modern Transistor Circuits ForbeginnersIliuta JohnNoch keine Bewertungen
- Medi ManualDokument39 SeitenMedi ManualBabuPD75% (8)
- D Chapter-569427-16-17Dokument2 SeitenD Chapter-569427-16-17Ashfaque AhmedNoch keine Bewertungen
- Working of TubelightDokument2 SeitenWorking of Tubelightjsrilakshmi42720% (2)
- CS 2635DDokument11 SeitenCS 2635DdereksopNoch keine Bewertungen
- Electric Circuit Armature Windings PDFDokument43 SeitenElectric Circuit Armature Windings PDFravineel00975% (8)
- Electrical Thumb Rules - 7Dokument4 SeitenElectrical Thumb Rules - 7Jeya KannanNoch keine Bewertungen
- Isoguard Serie 6Dokument112 SeitenIsoguard Serie 6Mauro010461Noch keine Bewertungen
- Gujarat Technological University: ContentDokument5 SeitenGujarat Technological University: ContentKuldeep SinhNoch keine Bewertungen
- 01 - SVC PLUS - DECRETO422 - Class Room Training - Principle - of - Operation Rev0Dokument46 Seiten01 - SVC PLUS - DECRETO422 - Class Room Training - Principle - of - Operation Rev0Rita jofréNoch keine Bewertungen
- 3G3PV (E7) en ManualDokument258 Seiten3G3PV (E7) en ManualBojan BosiljcicNoch keine Bewertungen
- HVDC 60years PDFDokument10 SeitenHVDC 60years PDFAdrian FernandezNoch keine Bewertungen
- CISSP All-in-One Exam Guide, Ninth EditionVon EverandCISSP All-in-One Exam Guide, Ninth EditionBewertung: 5 von 5 Sternen5/5 (1)
- Chip War: The Fight for the World's Most Critical TechnologyVon EverandChip War: The Fight for the World's Most Critical TechnologyBewertung: 4.5 von 5 Sternen4.5/5 (82)
- Chip War: The Quest to Dominate the World's Most Critical TechnologyVon EverandChip War: The Quest to Dominate the World's Most Critical TechnologyBewertung: 4.5 von 5 Sternen4.5/5 (228)
- Cyber-Physical Systems: Foundations, Principles and ApplicationsVon EverandCyber-Physical Systems: Foundations, Principles and ApplicationsHoubing H. SongNoch keine Bewertungen
- CompTIA A+ Complete Review Guide: Exam Core 1 220-1001 and Exam Core 2 220-1002Von EverandCompTIA A+ Complete Review Guide: Exam Core 1 220-1001 and Exam Core 2 220-1002Bewertung: 5 von 5 Sternen5/5 (1)
- iPhone 14 Guide for Seniors: Unlocking Seamless Simplicity for the Golden Generation with Step-by-Step ScreenshotsVon EverandiPhone 14 Guide for Seniors: Unlocking Seamless Simplicity for the Golden Generation with Step-by-Step ScreenshotsBewertung: 5 von 5 Sternen5/5 (3)
- iPhone Unlocked for the Non-Tech Savvy: Color Images & Illustrated Instructions to Simplify the Smartphone Use for Beginners & Seniors [COLOR EDITION]Von EverandiPhone Unlocked for the Non-Tech Savvy: Color Images & Illustrated Instructions to Simplify the Smartphone Use for Beginners & Seniors [COLOR EDITION]Bewertung: 5 von 5 Sternen5/5 (3)
- Computer Science: A Concise IntroductionVon EverandComputer Science: A Concise IntroductionBewertung: 4.5 von 5 Sternen4.5/5 (14)
- CompTIA A+ Certification All-in-One Exam Guide, Eleventh Edition (Exams 220-1101 & 220-1102)Von EverandCompTIA A+ Certification All-in-One Exam Guide, Eleventh Edition (Exams 220-1101 & 220-1102)Bewertung: 5 von 5 Sternen5/5 (2)
- CompTIA A+ Complete Review Guide: Core 1 Exam 220-1101 and Core 2 Exam 220-1102Von EverandCompTIA A+ Complete Review Guide: Core 1 Exam 220-1101 and Core 2 Exam 220-1102Bewertung: 5 von 5 Sternen5/5 (2)
- Mastering IoT For Industrial Environments: Unlock the IoT Landscape for Industrial Environments with Industry 4.0, Covering Architecture, Protocols like MQTT, and Advancements with ESP-IDFVon EverandMastering IoT For Industrial Environments: Unlock the IoT Landscape for Industrial Environments with Industry 4.0, Covering Architecture, Protocols like MQTT, and Advancements with ESP-IDFNoch keine Bewertungen
- Hacking With Linux 2020:A Complete Beginners Guide to the World of Hacking Using Linux - Explore the Methods and Tools of Ethical Hacking with LinuxVon EverandHacking With Linux 2020:A Complete Beginners Guide to the World of Hacking Using Linux - Explore the Methods and Tools of Ethical Hacking with LinuxNoch keine Bewertungen
- The comprehensive guide to build Raspberry Pi 5 RoboticsVon EverandThe comprehensive guide to build Raspberry Pi 5 RoboticsNoch keine Bewertungen
- iPhone X Hacks, Tips and Tricks: Discover 101 Awesome Tips and Tricks for iPhone XS, XS Max and iPhone XVon EverandiPhone X Hacks, Tips and Tricks: Discover 101 Awesome Tips and Tricks for iPhone XS, XS Max and iPhone XBewertung: 3 von 5 Sternen3/5 (2)
- Raspberry PI: Learn Rasberry Pi Programming the Easy Way, A Beginner Friendly User GuideVon EverandRaspberry PI: Learn Rasberry Pi Programming the Easy Way, A Beginner Friendly User GuideNoch keine Bewertungen
- Raspberry Pi for Python Programmers Cookbook - Second EditionVon EverandRaspberry Pi for Python Programmers Cookbook - Second EditionNoch keine Bewertungen
- Amazon Web Services (AWS) Interview Questions and AnswersVon EverandAmazon Web Services (AWS) Interview Questions and AnswersBewertung: 4.5 von 5 Sternen4.5/5 (3)
- Essential iPhone X iOS 12 Edition: The Illustrated Guide to Using iPhone XVon EverandEssential iPhone X iOS 12 Edition: The Illustrated Guide to Using iPhone XBewertung: 5 von 5 Sternen5/5 (1)
- Cancer and EMF Radiation: How to Protect Yourself from the Silent Carcinogen of ElectropollutionVon EverandCancer and EMF Radiation: How to Protect Yourself from the Silent Carcinogen of ElectropollutionBewertung: 5 von 5 Sternen5/5 (2)
- Raspberry Pi Retro Gaming: Build Consoles and Arcade Cabinets to Play Your Favorite Classic GamesVon EverandRaspberry Pi Retro Gaming: Build Consoles and Arcade Cabinets to Play Your Favorite Classic GamesNoch keine Bewertungen