Das könnte Ihnen auch gefallen
- Solutions: Solutions Manual For Mechanical Vibration Analysis Uncertainties and Control 3Rd Edition BenaroyaDokument81 SeitenSolutions: Solutions Manual For Mechanical Vibration Analysis Uncertainties and Control 3Rd Edition BenaroyaANTONIO RODRIGUESNoch keine Bewertungen
- Dynamic Analysis GuideDokument14 SeitenDynamic Analysis GuideKumar NishantNoch keine Bewertungen
- Air Cooler - DesignDokument7 SeitenAir Cooler - Designkarthipetro100% (1)
- Dynamic Analysis Guide PDFDokument14 SeitenDynamic Analysis Guide PDFJuniorNoch keine Bewertungen
- A Guide To Low Frequency Vibration Measurement IrdDokument13 SeitenA Guide To Low Frequency Vibration Measurement IrdPIRATASANTANANoch keine Bewertungen
- Hardness TheoryDokument4 SeitenHardness Theorykostas.sierros937491% (11)
- Example Problems 4 Master Admission ExamDokument5 SeitenExample Problems 4 Master Admission ExamReddy Babu50% (2)
- Interactions between Electromagnetic Fields and Matter: Vieweg Tracts in Pure and Applied PhysicsVon EverandInteractions between Electromagnetic Fields and Matter: Vieweg Tracts in Pure and Applied PhysicsNoch keine Bewertungen
- Dynamic Analysis Guide PDFDokument14 SeitenDynamic Analysis Guide PDFABDULLAHNoch keine Bewertungen
- Lecture 1 Internal Loadings and StressesDokument22 SeitenLecture 1 Internal Loadings and Stresseskyle vincent0% (1)
- RT Exercises and Solutions Med TentatalDokument264 SeitenRT Exercises and Solutions Med TentatalSANA100% (1)
- Grade 10 Physics NotesDokument136 SeitenGrade 10 Physics NotesSaint GilbertNoch keine Bewertungen
- Hasbun PosterDokument21 SeitenHasbun PosterSuhailUmarNoch keine Bewertungen
- Steel Jacket Retrofitting 1 PDFDokument12 SeitenSteel Jacket Retrofitting 1 PDFzakaria200811060Noch keine Bewertungen
- MCHE485 Final Spring2015 SolDokument15 SeitenMCHE485 Final Spring2015 SolMahdi KarimiNoch keine Bewertungen
- MCHE485 Final Spring2018Dokument7 SeitenMCHE485 Final Spring2018Mahdi KarimiNoch keine Bewertungen
- MCHE485 Final Spring2016Dokument8 SeitenMCHE485 Final Spring2016Mahdi KarimiNoch keine Bewertungen
- HW 2Dokument4 SeitenHW 2Rajeuv GovindanNoch keine Bewertungen
- MCHE485 Final Spring2015Dokument8 SeitenMCHE485 Final Spring2015Mahdi KarimiNoch keine Bewertungen
- An Introduction To Electrostatic ActuatorDokument32 SeitenAn Introduction To Electrostatic Actuatormujeeb.abdullah2830Noch keine Bewertungen
- Ejercicios DSCDokument39 SeitenEjercicios DSCFreyley LeyvaNoch keine Bewertungen
- 01 Introduction To PhysicsDokument5 Seiten01 Introduction To PhysicsbhuvneshNoch keine Bewertungen
- MCHE485 Final Spring2019Dokument7 SeitenMCHE485 Final Spring2019Mahdi KarimiNoch keine Bewertungen
- Exam 2Dokument7 SeitenExam 2hasagiNoch keine Bewertungen
- CLAB1Dokument4 SeitenCLAB1Mohammed GowharNoch keine Bewertungen
- P M - E L S: Ractice ID Term XAM Inear Ystems Jo Ao P. HespanhaDokument2 SeitenP M - E L S: Ractice ID Term XAM Inear Ystems Jo Ao P. HespanhaGokulnathKuppusamyNoch keine Bewertungen
- Excercise of Mathetic of ModelingDokument4 SeitenExcercise of Mathetic of ModelingDương Chí TuấnNoch keine Bewertungen
- Tutorial-V PH11001 Physics-II: A ( (MX / H) +it)Dokument1 SeiteTutorial-V PH11001 Physics-II: A ( (MX / H) +it)AbhasNoch keine Bewertungen
- Automatic Control III Homework Assignment 3 2015Dokument4 SeitenAutomatic Control III Homework Assignment 3 2015salimNoch keine Bewertungen
- Signal and SystemDokument24 SeitenSignal and SystemMagarsaa Qana'iiNoch keine Bewertungen
- Rasheef Maths AssignmantDokument10 SeitenRasheef Maths AssignmantMohamed SanoosNoch keine Bewertungen
- Damping: A Guide To Linear Dynamic Analysis WithDokument14 SeitenDamping: A Guide To Linear Dynamic Analysis WithThyaga RajNoch keine Bewertungen
- Dynamic Analysis GuideDokument14 SeitenDynamic Analysis GuideR Siva KumaranNoch keine Bewertungen
- Dynamic Analysis GuideDokument14 SeitenDynamic Analysis GuideEduardo LópezNoch keine Bewertungen
- Dynamic Analysis Guide PDFDokument14 SeitenDynamic Analysis Guide PDFVijay PNoch keine Bewertungen
- Dynamic Analysis Guide PDFDokument14 SeitenDynamic Analysis Guide PDFPankajDhobleNoch keine Bewertungen
- Dynamic Analysis Guide PDFDokument14 SeitenDynamic Analysis Guide PDFDiksith WilliamNoch keine Bewertungen
- Dynamic Analysis GuideDokument14 SeitenDynamic Analysis Guidemirza_munir_baig995Noch keine Bewertungen
- Dynamic Analysis GuideDokument14 SeitenDynamic Analysis Guidesfrancois21100% (1)
- Dynamic Analysis Guide PDFDokument14 SeitenDynamic Analysis Guide PDFasifNoch keine Bewertungen
- Dynamics PDFDokument14 SeitenDynamics PDFDiksith WilliamNoch keine Bewertungen
- Dynamic Analysis GuideDokument14 SeitenDynamic Analysis GuideMULAGONDLA DINESH REDDYNoch keine Bewertungen
- Dynamic Analysis Guide PDFDokument14 SeitenDynamic Analysis Guide PDFhjklmlkNoch keine Bewertungen
- Dynamic Analysis GuideDokument14 SeitenDynamic Analysis GuiderihabNoch keine Bewertungen
- MCQ Unit 5Dokument6 SeitenMCQ Unit 5Sandesh KaleNoch keine Bewertungen
- Ashwin Chinnayya Et Al - A New Concept For The Modeling of Detonation Waves in Multiphase MixturesDokument10 SeitenAshwin Chinnayya Et Al - A New Concept For The Modeling of Detonation Waves in Multiphase MixturesNikeShoxxxNoch keine Bewertungen
- DSP MCQ With Answer-Unit IDokument9 SeitenDSP MCQ With Answer-Unit IAbineshNoch keine Bewertungen
- Homework No. 5Dokument4 SeitenHomework No. 5Girish JayaramanNoch keine Bewertungen
- Sample Exam 1 Phys 213Dokument7 SeitenSample Exam 1 Phys 213Julio César Macías ZamoraNoch keine Bewertungen
- Massachusetts Institute of Technology: Problem 2.1 (20 PTS)Dokument5 SeitenMassachusetts Institute of Technology: Problem 2.1 (20 PTS)Mayank SinghNoch keine Bewertungen
- Problem Set 1: 2.29 / 2.290 Numerical Fluid Mechanics - Spring 2021Dokument7 SeitenProblem Set 1: 2.29 / 2.290 Numerical Fluid Mechanics - Spring 2021Aman JalanNoch keine Bewertungen
- Quantum Problems PDFDokument2 SeitenQuantum Problems PDFphooolNoch keine Bewertungen
- Digital Signal Processing Homework - 1: T U T y DT T Dy DT T yDokument3 SeitenDigital Signal Processing Homework - 1: T U T y DT T Dy DT T yDavin OktavianNoch keine Bewertungen
- Systems and Control PDFDokument9 SeitenSystems and Control PDFHamid Farhan0% (1)
- Signal & System - UNIT - I - MCQDokument18 SeitenSignal & System - UNIT - I - MCQMr. AbrarNoch keine Bewertungen
- DSC Exercises PDFDokument37 SeitenDSC Exercises PDFsamielmadssiaNoch keine Bewertungen
- Experiment 2 Open-Loop Dynamics Response of Second Order Systems 1. ObjectivesDokument7 SeitenExperiment 2 Open-Loop Dynamics Response of Second Order Systems 1. ObjectivessinadasqNoch keine Bewertungen
- Exercises For TFFY54Dokument25 SeitenExercises For TFFY54sattar28Noch keine Bewertungen
- Exercises For TFFY54 PDFDokument25 SeitenExercises For TFFY54 PDFFábio Sin TierraNoch keine Bewertungen
- Signals Systems Lab 2Dokument5 SeitenSignals Systems Lab 2ahmad.a.touseefNoch keine Bewertungen
- Version: October 10, 2011: iϕ −iϕ iϕ −iϕDokument4 SeitenVersion: October 10, 2011: iϕ −iϕ iϕ −iϕShivam GargNoch keine Bewertungen
- AssignmentsDokument10 SeitenAssignmentsDQZNoch keine Bewertungen
- Quiz 1: 2.29 Numerical Fluid Mechanics - Fall 2009Dokument4 SeitenQuiz 1: 2.29 Numerical Fluid Mechanics - Fall 2009gokuler137Noch keine Bewertungen
- Metronome Syncronization Russia TSTDokument6 SeitenMetronome Syncronization Russia TSTQuang Chính PhạmNoch keine Bewertungen
- S&S CombinedDokument55 SeitenS&S Combinedzphil33Noch keine Bewertungen
- Using Different Techniques in Data Transferring by Optisystem ProgramDokument8 SeitenUsing Different Techniques in Data Transferring by Optisystem ProgramAliOucharNoch keine Bewertungen
- Lecture24 PDFDokument19 SeitenLecture24 PDFAliOucharNoch keine Bewertungen
- EEL760 Lecture10Dokument27 SeitenEEL760 Lecture10AliOucharNoch keine Bewertungen
- Linear Antennas: Role of ConductorsDokument10 SeitenLinear Antennas: Role of ConductorsAliOucharNoch keine Bewertungen
- Solutions: Homework 9: Ex. 9.1: TM Modes in A Rectangular WaveguideDokument4 SeitenSolutions: Homework 9: Ex. 9.1: TM Modes in A Rectangular WaveguideAliOucharNoch keine Bewertungen
- Ortho TRX LineDokument16 SeitenOrtho TRX LineAliOucharNoch keine Bewertungen
- Maths 4amDokument31 SeitenMaths 4amAliOuchar100% (1)
- Program Sqroot VAR A, X, Y:real Writeln ( Give A') Readln (A) X 1 y 0.5 (X+a/x) X y yDokument1 SeiteProgram Sqroot VAR A, X, Y:real Writeln ( Give A') Readln (A) X 1 y 0.5 (X+a/x) X y yAliOucharNoch keine Bewertungen
- Program Sqroot VAR A, X, Y:real Writeln ( Give A') Readln (A) X 1 y 0.5 (X+a/x) X y yDokument1 SeiteProgram Sqroot VAR A, X, Y:real Writeln ( Give A') Readln (A) X 1 y 0.5 (X+a/x) X y yAliOucharNoch keine Bewertungen
- 02 COMSOL-MATLAB LiveLink Wenger Engineering Paper COMSOL Conference 2011Dokument5 Seiten02 COMSOL-MATLAB LiveLink Wenger Engineering Paper COMSOL Conference 2011AliOucharNoch keine Bewertungen
- An Approach For Reducing Parasites Coupling Between Coupled Transmission Lines Employed in Power ElectronicsDokument3 SeitenAn Approach For Reducing Parasites Coupling Between Coupled Transmission Lines Employed in Power ElectronicsAliOucharNoch keine Bewertungen
- Applications - Transmission Line CalculatorDokument6 SeitenApplications - Transmission Line CalculatorAliOucharNoch keine Bewertungen
- Models - Mph.eigenmodes of RoomDokument10 SeitenModels - Mph.eigenmodes of RoomAliOucharNoch keine Bewertungen
- Programme en Pascal Qui Fait La Somme Des N Premiers NaturelsDokument2 SeitenProgramme en Pascal Qui Fait La Somme Des N Premiers NaturelsAliOucharNoch keine Bewertungen
- Ijert Ijert: Analysis of SPM and FWM in Optical Fiber Communication System Using OptisystemDokument4 SeitenIjert Ijert: Analysis of SPM and FWM in Optical Fiber Communication System Using OptisystemAliOucharNoch keine Bewertungen
- Physics 30 Course OutlineDokument3 SeitenPhysics 30 Course OutlineAngela Joan YedersbergerNoch keine Bewertungen
- Application of Plasticity Theory To ReinforcedDokument16 SeitenApplication of Plasticity Theory To ReinforcedAbbas Hilo AlkhazrajieNoch keine Bewertungen
- Jee Main 2021 March Attempt Official Question SolutionDokument154 SeitenJee Main 2021 March Attempt Official Question Solutiondixitmanish0786Noch keine Bewertungen
- CASTEP StartupDokument38 SeitenCASTEP StartupMuraleetharan BoopathiNoch keine Bewertungen
- Casading ME 3Dokument11 SeitenCasading ME 3Amandeep SinghNoch keine Bewertungen
- Introduction To Static Failure TheoriesDokument5 SeitenIntroduction To Static Failure TheoriesNicola FarolfiNoch keine Bewertungen
- Convection Heat Transfer in Micro-ChannelsDokument50 SeitenConvection Heat Transfer in Micro-ChannelsBehzad Mohajer100% (1)
- 08aa604 Heat and Mass TransferDokument2 Seiten08aa604 Heat and Mass TransferMari MuthuNoch keine Bewertungen
- 1st Sec. - Physics Full SummaryDokument57 Seiten1st Sec. - Physics Full SummaryWalaa AmrNoch keine Bewertungen
- Mod 11 01-10-09 ExtrasDokument591 SeitenMod 11 01-10-09 ExtrassebastienNoch keine Bewertungen
- LWR ModelDokument23 SeitenLWR ModelEmanuel FontellesNoch keine Bewertungen
- Science Module 4Dokument5 SeitenScience Module 4Christian Lazatin Sabadisto100% (1)
- PolyakovDokument3 SeitenPolyakovmenilanjan89nLNoch keine Bewertungen
- 1 HSS 590 Strain Life FatigueDokument8 Seiten1 HSS 590 Strain Life FatigueAdisa TutusicNoch keine Bewertungen
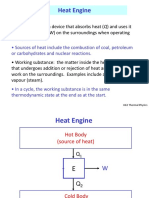
- Heat Engine: - Sources of Heat Include The Combustion of Coal, Petroleum or Carbohydrates and Nuclear ReactionsDokument27 SeitenHeat Engine: - Sources of Heat Include The Combustion of Coal, Petroleum or Carbohydrates and Nuclear ReactionsYeshua YeshaNoch keine Bewertungen
- Binary Vapor Liquid EquilibriumDokument7 SeitenBinary Vapor Liquid EquilibriumBiain A SecasNoch keine Bewertungen
- Mini Project 2Dokument5 SeitenMini Project 2Aakash NawabNoch keine Bewertungen
- Electric Charge and Electric Field: Powerpoint Lectures ForDokument38 SeitenElectric Charge and Electric Field: Powerpoint Lectures ForAnonymous AyCl4LNoch keine Bewertungen
- Kinetic Theory of An Ideal GASDokument45 SeitenKinetic Theory of An Ideal GASTâm NguyễnNoch keine Bewertungen
- KAS101T Phy AKTU 5yearDokument8 SeitenKAS101T Phy AKTU 5yearDevansh BansalNoch keine Bewertungen
- The Atwood Machine Lab Major LabDokument3 SeitenThe Atwood Machine Lab Major LabImdad HaqueNoch keine Bewertungen
- General Mech EnglishDokument19 SeitenGeneral Mech EnglishIbraheem KhressNoch keine Bewertungen
- Mos Lab ManualDokument57 SeitenMos Lab ManualsuswagatNoch keine Bewertungen
- 3C43 Lasers & Modern Optics Problem Sheet 2 - Lasers: G I DX DiDokument2 Seiten3C43 Lasers & Modern Optics Problem Sheet 2 - Lasers: G I DX DiShootingStarPhotonsNoch keine Bewertungen