Das könnte Ihnen auch gefallen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (587)
- Ratslam: Técnicas de Robots AutónomosDokument2 SeitenRatslam: Técnicas de Robots AutónomosJair YanguicelaNoch keine Bewertungen
- Volume 1number 2PP 356 363Dokument8 SeitenVolume 1number 2PP 356 363Hajer Al FasiNoch keine Bewertungen
- N Base Form Simple Past Past Participle MeaningDokument2 SeitenN Base Form Simple Past Past Participle MeaningJair YanguicelaNoch keine Bewertungen
- Avac1 Ingles6Dokument11 SeitenAvac1 Ingles6Jair YanguicelaNoch keine Bewertungen
- Talking about past events in English classDokument15 SeitenTalking about past events in English classJair YanguicelaNoch keine Bewertungen
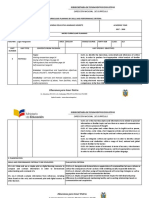
- Plan de Destreza Bloque 4 2018Dokument25 SeitenPlan de Destreza Bloque 4 2018Jair YanguicelaNoch keine Bewertungen
- Institucion Educativa Católica "Mariano Negrete "Dokument2 SeitenInstitucion Educativa Católica "Mariano Negrete "Jair YanguicelaNoch keine Bewertungen
- ACAD Elec 2012 UserGuideDokument2.814 SeitenACAD Elec 2012 UserGuideingluislongoNoch keine Bewertungen
- Auto Deber Sub Rut in AsDokument1 SeiteAuto Deber Sub Rut in AsJair YanguicelaNoch keine Bewertungen
- Evaluacion Bloque 5 SextoDokument3 SeitenEvaluacion Bloque 5 SextoJair YanguicelaNoch keine Bewertungen
- Atm1602b Display LCDDokument11 SeitenAtm1602b Display LCDGuillermo BloemNoch keine Bewertungen
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2219)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (265)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (119)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Ross 308 AP Broiler PO2019-EN PDFDokument16 SeitenRoss 308 AP Broiler PO2019-EN PDFJORGE GALVISNoch keine Bewertungen
- Surface Roughness Measurement - MitutoyoDokument2 SeitenSurface Roughness Measurement - MitutoyoSelvaraj BalasundramNoch keine Bewertungen
- Real Talk GrammarDokument237 SeitenReal Talk GrammarOmar yoshiNoch keine Bewertungen
- TRUKE C20-33(35)L CLARK ENGINE PARTS LISTDokument2 SeitenTRUKE C20-33(35)L CLARK ENGINE PARTS LISTРоман ПетровNoch keine Bewertungen
- Technical Data Speedmaster CX 104Dokument2 SeitenTechnical Data Speedmaster CX 104Vinh Lê HữuNoch keine Bewertungen
- Malaria Epidemiology & PreventionDokument92 SeitenMalaria Epidemiology & PreventionritikaritikaNoch keine Bewertungen
- Etabloc Technical DataDokument108 SeitenEtabloc Technical Dataedward ksbNoch keine Bewertungen
- Advanced Technologies of CDQ Plant Advanced Technologies of CDQ PlantDokument12 SeitenAdvanced Technologies of CDQ Plant Advanced Technologies of CDQ Plant조기현Noch keine Bewertungen
- Anhydrous Ammonia Unloading Station & Storage/Vaporizer SystemDokument2 SeitenAnhydrous Ammonia Unloading Station & Storage/Vaporizer SystemWalter Rigamonti100% (1)
- ABB Price Book 714Dokument1 SeiteABB Price Book 714EliasNoch keine Bewertungen
- DOCUMENT guides the way with VLB-44 LED Marine BeaconDokument4 SeitenDOCUMENT guides the way with VLB-44 LED Marine BeaconbenNoch keine Bewertungen
- Iot Finals Clap Switch Group 5Dokument15 SeitenIot Finals Clap Switch Group 5RICHYBOY SALACNoch keine Bewertungen
- 2206 - Stamina Monograph - 0 PDFDokument3 Seiten2206 - Stamina Monograph - 0 PDFMhuez Iz Brave'sNoch keine Bewertungen
- AUS Triboard ManuaDokument112 SeitenAUS Triboard ManuaWan RidsNoch keine Bewertungen
- Making Soap From WoodDokument6 SeitenMaking Soap From WoodmastabloidNoch keine Bewertungen
- English Task Resumido 2Dokument12 SeitenEnglish Task Resumido 2Luis ArmandoNoch keine Bewertungen
- Chinkon Kishin - Origens Shintoístas Do Okiyome e Do Espiritismo Na MahikariDokument2 SeitenChinkon Kishin - Origens Shintoístas Do Okiyome e Do Espiritismo Na MahikariGauthier Alex Freitas de Abreu0% (1)
- Spcr-TagbayaganDokument76 SeitenSpcr-TagbayaganReycia Vic QuintanaNoch keine Bewertungen
- Educ 211 Ancient EgyptDokument27 SeitenEduc 211 Ancient Egyptapi-207262700Noch keine Bewertungen
- Christmas Around the WorldDokument16 SeitenChristmas Around the WorldVioleta Veljanovska100% (1)
- Sepuran® N Module 4": in NM /H at 7 Barg 25°CDokument2 SeitenSepuran® N Module 4": in NM /H at 7 Barg 25°CsanjaigNoch keine Bewertungen
- Tenofovir Disoproxil Fumarate: Riefing - Nfrared BsorptionDokument4 SeitenTenofovir Disoproxil Fumarate: Riefing - Nfrared BsorptionMostofa RubalNoch keine Bewertungen
- Tribology - Lubricants and LubricationDokument330 SeitenTribology - Lubricants and LubricationJosé Ramírez100% (2)
- Preparation and Evaluation of Orthodontic Setup PDFDokument20 SeitenPreparation and Evaluation of Orthodontic Setup PDFLiezty VioLen'sNoch keine Bewertungen
- HTTP Verbs GET POST PUT PATCH DELETE (39Dokument12 SeitenHTTP Verbs GET POST PUT PATCH DELETE (39Jefferson EducacionNoch keine Bewertungen
- Moisture ManagementDokument5 SeitenMoisture ManagementSombis2011Noch keine Bewertungen
- 2tak Vs 4takDokument3 Seiten2tak Vs 4takTaufiq AlhakimNoch keine Bewertungen
- Meditations on Ancient Astrology Principles from Brihat Parashari HorāDokument87 SeitenMeditations on Ancient Astrology Principles from Brihat Parashari HorāPrasanna KumarNoch keine Bewertungen
- Indo American Journal of Pharmaceutical Research (India)Dokument4 SeitenIndo American Journal of Pharmaceutical Research (India)Pharmacy2011journalsNoch keine Bewertungen
- Uv Spectrophotometric Estimation of Carvedilol Hydrochloride by First Order Derivative and Area Under Curve Methods in Bulk and PH PDFDokument7 SeitenUv Spectrophotometric Estimation of Carvedilol Hydrochloride by First Order Derivative and Area Under Curve Methods in Bulk and PH PDFMeilia SuhermanNoch keine Bewertungen