Das könnte Ihnen auch gefallen
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Differential EquationsDokument5 SeitenDifferential EquationsJoe Randy100% (2)
- Acoustic Diffuser Optimization ArqenDokument86 SeitenAcoustic Diffuser Optimization ArqenPedroMeirelesNoch keine Bewertungen
- Durability of ConcreteDokument31 SeitenDurability of ConcreteTabish IzharNoch keine Bewertungen
- Technical Specification Canopy - MPDokument10 SeitenTechnical Specification Canopy - MPTabish IzharNoch keine Bewertungen
- Second Degree EquationDokument5 SeitenSecond Degree Equationaerogem618100% (1)
- 2 - Lecture - Differential Analysis of Fluid FlowDokument95 Seiten2 - Lecture - Differential Analysis of Fluid FlowManxar MasudNoch keine Bewertungen
- Zero Stiffness Tensegrity StructuresDokument15 SeitenZero Stiffness Tensegrity StructuresTabish IzharNoch keine Bewertungen
- Part 8 PG 110 145 253Dokument6 SeitenPart 8 PG 110 145 253Tabish IzharNoch keine Bewertungen
- About Some Tensegrity StructuresDokument5 SeitenAbout Some Tensegrity StructuresTabish IzharNoch keine Bewertungen
- Experimental Study On Mix Design of Pumpable Concrete: Tabish Izhar 13/CE/408 Dept. of Civil EngineeringDokument21 SeitenExperimental Study On Mix Design of Pumpable Concrete: Tabish Izhar 13/CE/408 Dept. of Civil EngineeringTabish Izhar0% (1)
- Department of Civil Engineering.: Engineer'S EyeDokument73 SeitenDepartment of Civil Engineering.: Engineer'S EyeTabish IzharNoch keine Bewertungen
- Geotechnical Engineering - 1Dokument1 SeiteGeotechnical Engineering - 1Tabish IzharNoch keine Bewertungen
- Load CalculationsDokument10 SeitenLoad CalculationsTabish IzharNoch keine Bewertungen
- Angle of Repose/ Friction ф = 18 0.314 Unit Wt. of Soil ϒ = 16.677Dokument3 SeitenAngle of Repose/ Friction ф = 18 0.314 Unit Wt. of Soil ϒ = 16.677Tabish IzharNoch keine Bewertungen
- As/ Detail Struture Glazing As/ Detail 230 Thick Brick Wall: CanopyDokument1 SeiteAs/ Detail Struture Glazing As/ Detail 230 Thick Brick Wall: CanopyTabish IzharNoch keine Bewertungen
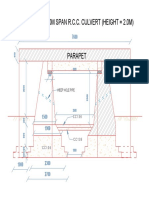
- Colvert Detail ModelDokument1 SeiteColvert Detail ModelTabish IzharNoch keine Bewertungen
- Canopy Detail Elevation - ModelDokument1 SeiteCanopy Detail Elevation - ModelTabish IzharNoch keine Bewertungen
- Comparision Code Mix CodesDokument5 SeitenComparision Code Mix CodesTabish IzharNoch keine Bewertungen
- Multi-Resolution Analysis and WaveletsDokument13 SeitenMulti-Resolution Analysis and WaveletsNabeel HashimNoch keine Bewertungen
- Lecture Notes For Class5Dokument21 SeitenLecture Notes For Class5Perry01Noch keine Bewertungen
- Forecasting Techniques NotesDokument26 SeitenForecasting Techniques NotesJohana Coen JanssenNoch keine Bewertungen
- Kinimatics ApbDokument1 SeiteKinimatics Apbapi-199066238Noch keine Bewertungen
- Remainder TheoremDokument12 SeitenRemainder TheoremLairepmi EmjaneNoch keine Bewertungen
- AFEM Ch11Dokument18 SeitenAFEM Ch11Arun Kumar KumarNoch keine Bewertungen
- Matrix Algebra Tutor - Workdheet 8 - Solving Systems Using Matrix InversesDokument32 SeitenMatrix Algebra Tutor - Workdheet 8 - Solving Systems Using Matrix InverseshindusaarthiNoch keine Bewertungen
- Approximation NotesDokument14 SeitenApproximation NotesschaNoch keine Bewertungen
- Quantitative Techniques in Management: Part A Descriptive Type QuestionDokument33 SeitenQuantitative Techniques in Management: Part A Descriptive Type QuestionAiDLo67% (9)
- Chapter 18Dokument14 SeitenChapter 18Anonymous u9HONqxnNoch keine Bewertungen
- Answer Scheme Quiz 1 Eem 343Dokument5 SeitenAnswer Scheme Quiz 1 Eem 343Nur AfiqahNoch keine Bewertungen
- AbstractDokument2 SeitenAbstractAnonymous zHmefGH30YNoch keine Bewertungen
- 11th Maths - 1st Revision Test 2022 - Model Question Paper - Kanchipuram District - English Medium PDF DownloadDokument4 Seiten11th Maths - 1st Revision Test 2022 - Model Question Paper - Kanchipuram District - English Medium PDF Downloadshreenidhi umashankarNoch keine Bewertungen
- On The Stress Integration in Large Strain Elasto-Plasticity: Francisco J. Montáns, Klaus-Jürgen BatheDokument4 SeitenOn The Stress Integration in Large Strain Elasto-Plasticity: Francisco J. Montáns, Klaus-Jürgen BathecyrusnasiraiNoch keine Bewertungen
- Introduction To Lebesgue Integral PDFDokument15 SeitenIntroduction To Lebesgue Integral PDFDavid Merayo FernándezNoch keine Bewertungen
- Applied Statistics in Business & Economics,: David P. Doane and Lori E. SewardDokument48 SeitenApplied Statistics in Business & Economics,: David P. Doane and Lori E. SewardmohammedrahilNoch keine Bewertungen
- Multidimensional Arrays:: 1. Explain About Multidimensional Array? (Model Question)Dokument12 SeitenMultidimensional Arrays:: 1. Explain About Multidimensional Array? (Model Question)vinod3457Noch keine Bewertungen
- Signal Theory and ApplicationDokument16 SeitenSignal Theory and ApplicationricetNoch keine Bewertungen
- Math GU4061: Introduction To Modern Analysis I Fall 2018: ExamsDokument4 SeitenMath GU4061: Introduction To Modern Analysis I Fall 2018: ExamsEli FonsecaNoch keine Bewertungen
- Tires Numerical Auc03 FiatDokument19 SeitenTires Numerical Auc03 FiatvoldemortsNoch keine Bewertungen
- Maths Mock Test - 5Dokument8 SeitenMaths Mock Test - 5ModeetNoch keine Bewertungen
- Problem 3-11 PDFDokument2 SeitenProblem 3-11 PDFHarishNoch keine Bewertungen
- Chapter 12 Functions PDFDokument2 SeitenChapter 12 Functions PDFGeorge Choo100% (1)
- MECE 211 Text BookDokument353 SeitenMECE 211 Text Bookmutlu_bağdaşNoch keine Bewertungen
- Complex IntegrationIDokument4 SeitenComplex IntegrationIGharib MahmoudNoch keine Bewertungen
- Inverted Pendulum Equations of MotionDokument6 SeitenInverted Pendulum Equations of Motionapi-439746975Noch keine Bewertungen