Das könnte Ihnen auch gefallen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- ME 343: Mechanical Design-3 Sheet 1: ShaftsDokument1 SeiteME 343: Mechanical Design-3 Sheet 1: ShaftsLasse HansenNoch keine Bewertungen
- 2015.06 Why You Cant Rely On Temperature MeasurementsDokument4 Seiten2015.06 Why You Cant Rely On Temperature MeasurementsLasse HansenNoch keine Bewertungen
- Diesel Engine ConstructionDokument53 SeitenDiesel Engine ConstructionLasse HansenNoch keine Bewertungen
- Steel SpringFlexCoupling BackDokument2 SeitenSteel SpringFlexCoupling BackLasse HansenNoch keine Bewertungen
- Review of Rotor BalancingDokument8 SeitenReview of Rotor BalancingLasse HansenNoch keine Bewertungen
- Review of Rotor BalancingDokument8 SeitenReview of Rotor BalancingLasse HansenNoch keine Bewertungen
- Putting The Damper On Torsional VibrationDokument5 SeitenPutting The Damper On Torsional VibrationLasse HansenNoch keine Bewertungen
- Low Frequency Vibration Analysis & Effects of AC CouplingDokument5 SeitenLow Frequency Vibration Analysis & Effects of AC CouplingLasse HansenNoch keine Bewertungen
- Lets Try To Really Understand Coupling BalanceDokument12 SeitenLets Try To Really Understand Coupling BalanceLasse HansenNoch keine Bewertungen
- Ac135 Series: Unconditional, Lifetime WarrantyDokument1 SeiteAc135 Series: Unconditional, Lifetime WarrantyLasse HansenNoch keine Bewertungen
- MAN B&W V48-60B Spare Parts CatalogueDokument346 SeitenMAN B&W V48-60B Spare Parts CatalogueLasse Hansen100% (1)
- AMS 2140 Configuration Guidelines For Reciprocating CompressorsDokument17 SeitenAMS 2140 Configuration Guidelines For Reciprocating CompressorsLasse HansenNoch keine Bewertungen
- Manual Motor Diesel 1135386, 1135389, 1135411, 1135412, 1135413, 1135414, 1135415, 1135416 - 2Dokument316 SeitenManual Motor Diesel 1135386, 1135389, 1135411, 1135412, 1135413, 1135414, 1135415, 1135416 - 2Lasse HansenNoch keine Bewertungen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- #1Dokument74 Seiten#1Brianne Yuen TyskNoch keine Bewertungen
- Happy FinalDokument32 SeitenHappy FinalRaju MehtaNoch keine Bewertungen
- Poly Suga BetaineDokument4 SeitenPoly Suga Betainemndmatt100% (1)
- Drawbacks of The Existing SystemDokument7 SeitenDrawbacks of The Existing SystemSachin Mohite100% (1)
- Jchps 6 (4) 15 Page 286-292 MsreddyDokument7 SeitenJchps 6 (4) 15 Page 286-292 MsreddydwahyusafriNoch keine Bewertungen
- CV Europass 20190114 LucianConstantin enDokument2 SeitenCV Europass 20190114 LucianConstantin enLucian DumitracheNoch keine Bewertungen
- Personal Details:: User ID Candidate's NameDokument9 SeitenPersonal Details:: User ID Candidate's NameAnkur SharmaNoch keine Bewertungen
- Action Research: Repeated Reading To Improve Students' Reading FluencyDokument4 SeitenAction Research: Repeated Reading To Improve Students' Reading FluencyIylia NatasyaNoch keine Bewertungen
- COT 2 Reading and Writing Q4Dokument4 SeitenCOT 2 Reading and Writing Q4Romy Sales Grande Jr.Noch keine Bewertungen
- EstratehiyaDokument2 SeitenEstratehiyaMikaella AlvarezaNoch keine Bewertungen
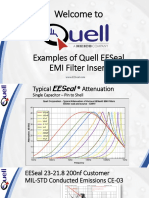
- Examples of Quell's EESeal EMI Filter Inserts - MIL-STD-461 Test ResultsDokument15 SeitenExamples of Quell's EESeal EMI Filter Inserts - MIL-STD-461 Test ResultsXto PeregrinNoch keine Bewertungen
- Course On Fracture Mechanics - IIT RoparDokument248 SeitenCourse On Fracture Mechanics - IIT RoparSumit BasuNoch keine Bewertungen
- Journal of Building Information Modeling - Fall 2010Dokument40 SeitenJournal of Building Information Modeling - Fall 2010bimpireNoch keine Bewertungen
- PF Chang's Health Inspection 6-21-19Dokument2 SeitenPF Chang's Health Inspection 6-21-19Jimmy BentleyNoch keine Bewertungen
- Information Current As of October 2008 Requirements Correspond To 2009-2010 CatalogDokument24 SeitenInformation Current As of October 2008 Requirements Correspond To 2009-2010 Catalogpiqueen314Noch keine Bewertungen
- OP5142 User Manual-ADokument40 SeitenOP5142 User Manual-AJignesh MakwanaNoch keine Bewertungen
- A Review of Shankuka's TheoryDokument14 SeitenA Review of Shankuka's TheoryrajashreeNoch keine Bewertungen
- Course 5 - Cooperative Principle and ImplicatureDokument6 SeitenCourse 5 - Cooperative Principle and ImplicatureAnca Ionela ManoleNoch keine Bewertungen
- Pedo Clinical Notes 1. Frankel Behaviour Scaling GradeDokument8 SeitenPedo Clinical Notes 1. Frankel Behaviour Scaling GradeleeminhoangrybirdNoch keine Bewertungen
- Western Underground - HV and Ehv Cables-CmeDokument38 SeitenWestern Underground - HV and Ehv Cables-CmeA. Hassan100% (2)
- Bonus, Alexander Evan - The Metronomic Performance Practice - A History of Rhythm, Metronomes, and The Mechanization of MusicalityDokument597 SeitenBonus, Alexander Evan - The Metronomic Performance Practice - A History of Rhythm, Metronomes, and The Mechanization of MusicalityNoMoPoMo576100% (2)
- CEBM Levels of Evidence Introduction 2.1Dokument3 SeitenCEBM Levels of Evidence Introduction 2.1Anida SaNiia BecKzNoch keine Bewertungen
- Forest Fire Risk AnalysisDokument11 SeitenForest Fire Risk AnalysisbhinojosaNoch keine Bewertungen
- Morane 4 PFN FffsDokument20 SeitenMorane 4 PFN FffsFatmen FataNoch keine Bewertungen
- Full Download Strategic Management Text and Cases 9th Edition Dess Test BankDokument35 SeitenFull Download Strategic Management Text and Cases 9th Edition Dess Test Banksaumvirgen2375812100% (28)
- Fault Seal Analysis, UK Noerthern Sea, The Alwyn North Statgjord ExampleDokument5 SeitenFault Seal Analysis, UK Noerthern Sea, The Alwyn North Statgjord ExampleAiwarikiaarNoch keine Bewertungen
- Astm G5Dokument12 SeitenAstm G5caop217100% (1)
- EC9560 Data Mining: Lab 02: Classification and Prediction Using WEKADokument5 SeitenEC9560 Data Mining: Lab 02: Classification and Prediction Using WEKAkeethanNoch keine Bewertungen
- Developmental Model of Intercultural Sensitivity (Oral Com Quiz)Dokument1 SeiteDevelopmental Model of Intercultural Sensitivity (Oral Com Quiz)Hero DiasNoch keine Bewertungen
- Renalyn N. Selloga Housekeeping NC IiDokument9 SeitenRenalyn N. Selloga Housekeeping NC IiAlex GinNoch keine Bewertungen