Das könnte Ihnen auch gefallen
- PlagiarismDokument24 SeitenPlagiarismAnonymous POUAc3z100% (1)
- ALPEMA Standard For Brazed Aluminium Plate-Fin Heat ExchangerDokument86 SeitenALPEMA Standard For Brazed Aluminium Plate-Fin Heat ExchangerdgkmurtiNoch keine Bewertungen
- Employee Quality Awareness Training: Presented byDokument11 SeitenEmployee Quality Awareness Training: Presented byJayant Kumar JhaNoch keine Bewertungen
- Jmi Telephone Directory 2022Dokument107 SeitenJmi Telephone Directory 2022Prince Soni XII D 21Noch keine Bewertungen
- Actividad 6 Semana 3 - UndécimoDokument6 SeitenActividad 6 Semana 3 - UndécimoanonimusNoch keine Bewertungen
- Proposal Cafe Janji JiwaDokument24 SeitenProposal Cafe Janji JiwaIbamz SiswantoNoch keine Bewertungen
- Jahanshahi 2011 - Adaptive Vision-Based Crack DetectionDokument10 SeitenJahanshahi 2011 - Adaptive Vision-Based Crack DetectionAntonNoch keine Bewertungen
- Pavement Crack Detection Method of Street View Images Based On Deep LearningDokument7 SeitenPavement Crack Detection Method of Street View Images Based On Deep LearningzaidalkabiNoch keine Bewertungen
- SAR Image Change Detection Based On Frequency Domain Analysis and Random Multi-GraphsDokument18 SeitenSAR Image Change Detection Based On Frequency Domain Analysis and Random Multi-GraphsfayNoch keine Bewertungen
- A Cost Effective Solution For Road Crack Inspection Using Cameras and Deep Neural NetworksDokument26 SeitenA Cost Effective Solution For Road Crack Inspection Using Cameras and Deep Neural NetworksAyomide AkinrinadeNoch keine Bewertungen
- Research ArticleDokument16 SeitenResearch ArticleEdgar Enrique Vilca RomeroNoch keine Bewertungen
- Analysis of Convolutional Neural Networks For Rust Control in Building and Other AppearancesDokument7 SeitenAnalysis of Convolutional Neural Networks For Rust Control in Building and Other Appearancesharsh_1234Noch keine Bewertungen
- Review of Underwater Cable Shape Detection: Section 2 Section 3 Section 4Dokument10 SeitenReview of Underwater Cable Shape Detection: Section 2 Section 3 Section 4rianto wibowoNoch keine Bewertungen
- Pavement Crack Detection and Classification Based On Fusion Feature of LBP and PCA With SVMDokument11 SeitenPavement Crack Detection and Classification Based On Fusion Feature of LBP and PCA With SVMSebuah PesanNoch keine Bewertungen
- Road Crack Detection Using Deep Neural Network With Receptive Field BlockDokument8 SeitenRoad Crack Detection Using Deep Neural Network With Receptive Field BlockSebuah PesanNoch keine Bewertungen
- Crack Width in ConcreteDokument13 SeitenCrack Width in ConcreteMadhavi Latha KasulanatiNoch keine Bewertungen
- Sun 2022 J. Phys. Conf. Ser. 2215 012027Dokument6 SeitenSun 2022 J. Phys. Conf. Ser. 2215 012027essamabdelhamiedNoch keine Bewertungen
- Zhang2020 2Dokument16 SeitenZhang2020 2Edgar Enrique Vilca RomeroNoch keine Bewertungen
- Structual CrackDokument8 SeitenStructual CrackZIJIAN PANNoch keine Bewertungen
- Image-Based Retrieval of Concrete Crack PropertiesDokument8 SeitenImage-Based Retrieval of Concrete Crack PropertiesTHUẬN Nguyễn Thị NhưNoch keine Bewertungen
- Li Et Al 2020 A Modified Yolov3 Detection Method For Vision Based Water Surface Garbage Capture RobotDokument11 SeitenLi Et Al 2020 A Modified Yolov3 Detection Method For Vision Based Water Surface Garbage Capture Robotkhodimul istiqlalNoch keine Bewertungen
- A Modified Yolov3 Detection Method For Vision-Based Water Surface Garbage Capture RobotDokument11 SeitenA Modified Yolov3 Detection Method For Vision-Based Water Surface Garbage Capture RobotTejas M.pNoch keine Bewertungen
- Evaluacion Estructural Usando Nube de Puntos de TLSDokument35 SeitenEvaluacion Estructural Usando Nube de Puntos de TLSAimara LobosNoch keine Bewertungen
- Optik: Ahmed Mahgoub Ahmed Talab, Zhangcan Huang, Fan Xi, Liu HaimingDokument4 SeitenOptik: Ahmed Mahgoub Ahmed Talab, Zhangcan Huang, Fan Xi, Liu HaimingTùng NguyễnNoch keine Bewertungen
- Sensors 20 05329Dokument25 SeitenSensors 20 05329sunil kumar sharmaNoch keine Bewertungen
- Garbage Classification Detection Based On Improved YOLOV4: Qingqiang Chen, Qianghua XiongDokument10 SeitenGarbage Classification Detection Based On Improved YOLOV4: Qingqiang Chen, Qianghua XiongHai YangNoch keine Bewertungen
- Automatic Crack Detection and Measurement Based On Image AnaDokument8 SeitenAutomatic Crack Detection and Measurement Based On Image Anab3d.dharoharNoch keine Bewertungen
- 10 1002@stc 2551Dokument19 Seiten10 1002@stc 2551Edgar Enrique Vilca RomeroNoch keine Bewertungen
- Crack Detection in Concrete Using Transfer LearningDokument12 SeitenCrack Detection in Concrete Using Transfer LearningNugraha BintangNoch keine Bewertungen
- Cui 2021Dokument8 SeitenCui 2021mvssrajuNoch keine Bewertungen
- Application of Various YOLO Models For Computer ViDokument14 SeitenApplication of Various YOLO Models For Computer ViTrung Trị LêNoch keine Bewertungen
- Fusionnet: Edge Aware Deep Convolutional Networks For Semantic Segmentation of Remote Sensing Harbor ImagesDokument15 SeitenFusionnet: Edge Aware Deep Convolutional Networks For Semantic Segmentation of Remote Sensing Harbor ImagesAlison CarreraNoch keine Bewertungen
- 10 31032FS8756699017030062Dokument9 Seiten10 31032FS8756699017030062omar shadyNoch keine Bewertungen
- Tim 2020 3033726Dokument12 SeitenTim 2020 3033726redstitch15Noch keine Bewertungen
- Optical Micro-Profilometry For ArchaeologyDokument12 SeitenOptical Micro-Profilometry For ArchaeologyChuck NorrisNoch keine Bewertungen
- Energies 14 04365Dokument19 SeitenEnergies 14 04365Nikole BaezNoch keine Bewertungen
- 2001 RUIE 244次Dokument15 Seiten2001 RUIE 244次Alex StrangeNoch keine Bewertungen
- Comparison of Deep Concolutional Neural Networks and Edge Detectors For Image-Based Crack Detection in ConcreteDokument15 SeitenComparison of Deep Concolutional Neural Networks and Edge Detectors For Image-Based Crack Detection in ConcreteCamilo matta torresNoch keine Bewertungen
- Zhou 2015Dokument8 SeitenZhou 2015Long Đào HảiNoch keine Bewertungen
- Crack FetectionDokument12 SeitenCrack FetectionSurya Patria CraneNoch keine Bewertungen
- Institute of Civil EngineerinDokument7 SeitenInstitute of Civil Engineerinheherson juanNoch keine Bewertungen
- Paper 16Dokument18 SeitenPaper 16claudioNoch keine Bewertungen
- 2203 04822Dokument18 Seiten2203 04822Mustafa Kemal AmbarNoch keine Bewertungen
- Symmetry: Improved Yolov4 Marine Target Detection Combined With CbamDokument14 SeitenSymmetry: Improved Yolov4 Marine Target Detection Combined With CbamVũ Tâm MinhNoch keine Bewertungen
- Chemical Engineering Science: Y.M. Lau, N.G. Deen, J.A.M. KuipersDokument10 SeitenChemical Engineering Science: Y.M. Lau, N.G. Deen, J.A.M. KuipersDouglasSansaoNoch keine Bewertungen
- Corossion DetectionDokument6 SeitenCorossion Detectionsuresh mpNoch keine Bewertungen
- Sensors 21 07598Dokument15 SeitenSensors 21 07598Sagte_SaidNoch keine Bewertungen
- ACM Submission Underwater Image RestorationDokument13 SeitenACM Submission Underwater Image RestorationKarim KarimaNoch keine Bewertungen
- Detect Digital Image Splicing With Visual Cues: June 2009Dokument16 SeitenDetect Digital Image Splicing With Visual Cues: June 2009Srilakshmi VNoch keine Bewertungen
- Sustainability 13 08306Dokument16 SeitenSustainability 13 08306Dang Son TungNoch keine Bewertungen
- Classification of Painting Cracks For Content-Based AnalysisDokument12 SeitenClassification of Painting Cracks For Content-Based AnalysisMuflihana Utami July ErnawatiNoch keine Bewertungen
- Sensors: Defocus Blur Detection and Estimation From Imaging SensorsDokument15 SeitenSensors: Defocus Blur Detection and Estimation From Imaging SensorsCodingTonicNoch keine Bewertungen
- Materials 14 01154 v3Dokument24 SeitenMaterials 14 01154 v3navid jafariNoch keine Bewertungen
- Srinivasan - 2018 - IOP - Smart Traffic Control With Ambulance DetectionDokument7 SeitenSrinivasan - 2018 - IOP - Smart Traffic Control With Ambulance Detectionlee kok onnNoch keine Bewertungen
- Modification On Distance Transform To Avoid Over-Segmentation and Under-SegmentationDokument7 SeitenModification On Distance Transform To Avoid Over-Segmentation and Under-SegmentationSri Natha DesikanNoch keine Bewertungen
- Review 4Dokument2 SeitenReview 4MR. VYSHNAV V SNoch keine Bewertungen
- Automated Asphalt Highway Pavement Crack Detection Based On Deformable Single Shot Multi-Box Detector Under A Complex EnvironmentDokument14 SeitenAutomated Asphalt Highway Pavement Crack Detection Based On Deformable Single Shot Multi-Box Detector Under A Complex Environmentanonymala guyuolaNoch keine Bewertungen
- A Novel Approach To The Detection of Macula in Human Retinal ImageryDokument6 SeitenA Novel Approach To The Detection of Macula in Human Retinal ImageryRabia SaeedNoch keine Bewertungen
- 2019 Optical Remote Sensing Image Waters Extraction Technology Based On Deep Learning Context UnetDokument4 Seiten2019 Optical Remote Sensing Image Waters Extraction Technology Based On Deep Learning Context UnetsabrineNoch keine Bewertungen
- Kim2020 Article AFeasibleAndHolisticCharacteriDokument7 SeitenKim2020 Article AFeasibleAndHolisticCharacteriClinton RichardNoch keine Bewertungen
- Scatter Correction Method For Cone-Beam CT Based On Interlacing-Slit ScanDokument8 SeitenScatter Correction Method For Cone-Beam CT Based On Interlacing-Slit ScanСергій СенчуровNoch keine Bewertungen
- Rock Properties From Micro-Ct Images Digital Rock Transforms ForDokument50 SeitenRock Properties From Micro-Ct Images Digital Rock Transforms ForSANDRA BALLESTEROSNoch keine Bewertungen
- Saggaf, M.-PHD AbstractDokument4 SeitenSaggaf, M.-PHD Abstractabnou_223943920Noch keine Bewertungen
- Algorithms 14 00257 v2Dokument14 SeitenAlgorithms 14 00257 v2Selcuk SelcukNoch keine Bewertungen
- Underwater Computer Vision: Exploring the Depths of Computer Vision Beneath the WavesVon EverandUnderwater Computer Vision: Exploring the Depths of Computer Vision Beneath the WavesNoch keine Bewertungen
- Dam SafetyDokument11 SeitenDam SafetyCESARNoch keine Bewertungen
- Cury Et Al-2012-Structural Control and Health MonitoringDokument26 SeitenCury Et Al-2012-Structural Control and Health MonitoringCESARNoch keine Bewertungen
- Damage Detection Using Optical Measurements and WaveletsDokument18 SeitenDamage Detection Using Optical Measurements and WaveletsCESARNoch keine Bewertungen
- A Classification and Regression Trees (CART) Model of Parallel Structure and Long-Term Prediction Prognosis of Machine ConditionDokument12 SeitenA Classification and Regression Trees (CART) Model of Parallel Structure and Long-Term Prediction Prognosis of Machine ConditionCESARNoch keine Bewertungen
- A Functionally Layered Sensing Skin For The Detection of Corrosive Elements and CrackingDokument10 SeitenA Functionally Layered Sensing Skin For The Detection of Corrosive Elements and CrackingCESARNoch keine Bewertungen
- Hardware Implementation of Electrical Resistance Tomography For Damage Detection of Carbon Fibre-Reinforced Polymer CompositesDokument13 SeitenHardware Implementation of Electrical Resistance Tomography For Damage Detection of Carbon Fibre-Reinforced Polymer CompositesCESARNoch keine Bewertungen
- Characterization of Delamination-Type Damages in Composite Laminates Using Guided Wave Visualization and Air-Coupled UltrasoundDokument11 SeitenCharacterization of Delamination-Type Damages in Composite Laminates Using Guided Wave Visualization and Air-Coupled UltrasoundCESARNoch keine Bewertungen
- Structural Health Monitoring 2014 Dackermann 430 44Dokument16 SeitenStructural Health Monitoring 2014 Dackermann 430 44CESARNoch keine Bewertungen
- Cost-Effective Vision-Based System For Monitoring Dynamic Response of Civil Engineering StructuresDokument19 SeitenCost-Effective Vision-Based System For Monitoring Dynamic Response of Civil Engineering StructuresCESARNoch keine Bewertungen
- Sensors: Performance Evaluations of Lora Wireless Communication in Building EnvironmentsDokument19 SeitenSensors: Performance Evaluations of Lora Wireless Communication in Building EnvironmentsN sartikaNoch keine Bewertungen
- SCMIJ - EV Supply Chains - Final VersionDokument43 SeitenSCMIJ - EV Supply Chains - Final VersionAhmedEl-MenshawiNoch keine Bewertungen
- ATEX AssembliesDokument5 SeitenATEX AssembliesABHISHEK DOLLENoch keine Bewertungen
- SR5 TOOL Adept Powers List + Description, CompiledDokument5 SeitenSR5 TOOL Adept Powers List + Description, Compiledvwp09705Noch keine Bewertungen
- DLL-Q3-W6 - Mam LouDokument9 SeitenDLL-Q3-W6 - Mam LouChello Ann Pelaez AsuncionNoch keine Bewertungen
- Customer Sanctification Towards Super StoreDokument8 SeitenCustomer Sanctification Towards Super StoreVasant MahrajNoch keine Bewertungen
- Alice in Wonderland Literary AnalysisDokument5 SeitenAlice in Wonderland Literary AnalysisRica Jane Torres100% (1)
- How To Solder A Through-Hole Component: InstructablesDokument6 SeitenHow To Solder A Through-Hole Component: InstructablesBobKatNoch keine Bewertungen
- Huawei MA5608T H801MPWC DC Power Board Hardware DescriptionDokument5 SeitenHuawei MA5608T H801MPWC DC Power Board Hardware DescriptionHuawei GPON NetworksNoch keine Bewertungen
- Practical-Research-DLL-Week 4Dokument3 SeitenPractical-Research-DLL-Week 4JIMP ISRAEL CABUHATNoch keine Bewertungen
- Eder606 Albersworth Reality Check FinalDokument16 SeitenEder606 Albersworth Reality Check Finalapi-440856082Noch keine Bewertungen
- NIC:NAC:SILDokument19 SeitenNIC:NAC:SILSiva KumarNoch keine Bewertungen
- The Philips PavilionDokument12 SeitenThe Philips PavilionNiket PaiNoch keine Bewertungen
- Finite Element Heat Transfer EquationsDokument8 SeitenFinite Element Heat Transfer EquationsRicox4444Noch keine Bewertungen
- JVC KD r540 Manual de InstruccionesDokument16 SeitenJVC KD r540 Manual de InstruccionesJesus FloresNoch keine Bewertungen
- Sanyal Classification of Geothermal Systems 2005 PDFDokument8 SeitenSanyal Classification of Geothermal Systems 2005 PDFLevi OktaNoch keine Bewertungen
- PlaygroundsDokument15 SeitenPlaygroundsSyril De LimaNoch keine Bewertungen
- DPA Workstation Product BriefDokument2 SeitenDPA Workstation Product Brieftest catNoch keine Bewertungen
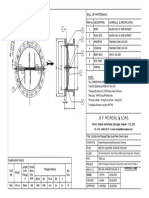
- Dual Plate 800 NB-ModelDokument1 SeiteDual Plate 800 NB-ModelTanmoy DuttaNoch keine Bewertungen
- Vce Chemistry Unit 3 Sac 2 Equilibrium Experimental Report: InstructionsDokument5 SeitenVce Chemistry Unit 3 Sac 2 Equilibrium Experimental Report: InstructionsJefferyNoch keine Bewertungen
- Tormax Automatic Sensor 7501Dokument12 SeitenTormax Automatic Sensor 7501name familyNoch keine Bewertungen
- Oxford Learner's Bookshelf E-Books For Learning 3Dokument1 SeiteOxford Learner's Bookshelf E-Books For Learning 3Yesenia Mendoza HernandezNoch keine Bewertungen
- MS University GuidelinesDokument40 SeitenMS University GuidelinesPrince Selvadasan DurairajNoch keine Bewertungen
- Fitting Catalog 2013: Maret 2013 - 112Dokument39 SeitenFitting Catalog 2013: Maret 2013 - 112SujokoTeeNoch keine Bewertungen