Das könnte Ihnen auch gefallen
- Linear Programming - Graphical SolutionDokument17 SeitenLinear Programming - Graphical SolutionTunisha Bhadauria100% (1)
- Linear Programme-Simplex and Graphical PDFDokument34 SeitenLinear Programme-Simplex and Graphical PDFRayan Rodrigues100% (1)
- Unit - 1b ORDokument32 SeitenUnit - 1b ORMedandrao. Kavya SreeNoch keine Bewertungen
- Linear Programming: The Graphical Method ExplainedDokument24 SeitenLinear Programming: The Graphical Method ExplainedansarabbasNoch keine Bewertungen
- Graphical Method To Solve LPPDokument19 SeitenGraphical Method To Solve LPPpraveenNoch keine Bewertungen
- Let x1 = number of ordinary stabilizers produced x2 = number of auto-cut stabilizers producedMaximize Z = 100x1 + 150x2Subject to: 0.8x1 + 1.2x2 ≤ 720x1 ≤ 600x2 ≤ 400x1, x2 ≥ 0Dokument20 SeitenLet x1 = number of ordinary stabilizers produced x2 = number of auto-cut stabilizers producedMaximize Z = 100x1 + 150x2Subject to: 0.8x1 + 1.2x2 ≤ 720x1 ≤ 600x2 ≤ 400x1, x2 ≥ 0RajyalakshmiNoch keine Bewertungen
- Nonlinear Optimization MethodsDokument80 SeitenNonlinear Optimization MethodsBrijesh Kumar MauryaNoch keine Bewertungen
- LP Optimization with Simplex MethodDokument19 SeitenLP Optimization with Simplex MethodKumarNoch keine Bewertungen
- 2-7 Linear ProgrammingDokument15 Seiten2-7 Linear ProgrammingmanjinderchabbaNoch keine Bewertungen
- Linear Programming - The Graphical MethodDokument6 SeitenLinear Programming - The Graphical MethodRenato B. AguilarNoch keine Bewertungen
- Session-3 Finding The Optimal Solution Using Graphical Method For A Given Linear Programming Problem (LPP)Dokument16 SeitenSession-3 Finding The Optimal Solution Using Graphical Method For A Given Linear Programming Problem (LPP)Avinash AllaNoch keine Bewertungen
- Module 7 B Solving Linear Inequalities Using Linear ProgrammingDokument11 SeitenModule 7 B Solving Linear Inequalities Using Linear ProgrammingKick YumNoch keine Bewertungen
- 595cd95fe4b00cb2966137f2 5e9a092ba8446510cc99fb5a 1615282586341Dokument10 Seiten595cd95fe4b00cb2966137f2 5e9a092ba8446510cc99fb5a 1615282586341Akshat NegiNoch keine Bewertungen
- Linear ProgrammingDokument34 SeitenLinear Programmingprofessorfk100% (3)
- Linear ProgrammingDokument13 SeitenLinear ProgrammingSanjoy BrahmaNoch keine Bewertungen
- Operations ResearchDokument7 SeitenOperations ResearchSai DNoch keine Bewertungen
- Graphical Solution of Linear Programming ModelsDokument44 SeitenGraphical Solution of Linear Programming ModelsNoor AsikinNoch keine Bewertungen
- 3 orDokument68 Seiten3 orYuri BrasilkaNoch keine Bewertungen
- LP Problem Formulation Process:: Linear OptimizationDokument9 SeitenLP Problem Formulation Process:: Linear OptimizationYusuf HusseinNoch keine Bewertungen
- Simple Linear Programming Model: Joel S. CasibangDokument49 SeitenSimple Linear Programming Model: Joel S. CasibangMichelle Dela CruzNoch keine Bewertungen
- OptimizationDokument38 SeitenOptimizationt2jzgeNoch keine Bewertungen
- Course Hero Final Exam Soluts.Dokument3 SeitenCourse Hero Final Exam Soluts.Christopher HaynesNoch keine Bewertungen
- Design Analysis and AlgorithmDokument83 SeitenDesign Analysis and AlgorithmLuis Anderson100% (2)
- Linear Programming: The Graphical MethodDokument41 SeitenLinear Programming: The Graphical MethodGaurav KumarNoch keine Bewertungen
- Module - 7 Lecture Notes - 1 Integer Linear ProgrammingDokument7 SeitenModule - 7 Lecture Notes - 1 Integer Linear Programmingswapna44Noch keine Bewertungen
- MC0079Dokument38 SeitenMC0079verma_rittika1987100% (1)
- Operation Research NotesDokument12 SeitenOperation Research Notessandy itNoch keine Bewertungen
- OR Module 2 SESSION 3Dokument65 SeitenOR Module 2 SESSION 3Vicky VijayNoch keine Bewertungen
- Linear ProgrammingDokument23 SeitenLinear ProgrammingKathan PatelNoch keine Bewertungen
- Cramer's Rule for Solving Systems of Linear EquationsDokument22 SeitenCramer's Rule for Solving Systems of Linear EquationsMemyah AlNoch keine Bewertungen
- LPP Mod 2Dokument27 SeitenLPP Mod 2ganusabhahit7Noch keine Bewertungen
- Linear Programming - FormulationDokument27 SeitenLinear Programming - FormulationTunisha BhadauriaNoch keine Bewertungen
- MIT15 053S13 Ps2-2solDokument8 SeitenMIT15 053S13 Ps2-2solErkin KorayNoch keine Bewertungen
- Chapter 2Dokument29 SeitenChapter 2Lyana JaafarNoch keine Bewertungen
- Linear Programming Simplex MethodDokument11 SeitenLinear Programming Simplex MethodFarhan AhmadNoch keine Bewertungen
- Exam SolutionDokument4 SeitenExam SolutionMohammed AbushammalaNoch keine Bewertungen
- Linear Programming OptimizationDokument37 SeitenLinear Programming OptimizationlaestatNoch keine Bewertungen
- MIT15 053S13 Ps6solDokument8 SeitenMIT15 053S13 Ps6solErkin KorayNoch keine Bewertungen
- group d assignmentDokument7 Seitengroup d assignmentkacaNoch keine Bewertungen
- Unit 4lpfinal BSC 012 Bl4Dokument35 SeitenUnit 4lpfinal BSC 012 Bl4ax33m144Noch keine Bewertungen
- Module - 3 Lecture Notes - 3 Simplex Method - IDokument11 SeitenModule - 3 Lecture Notes - 3 Simplex Method - Iswapna44Noch keine Bewertungen
- Graphical LP: Solving linear programs graphicallyDokument11 SeitenGraphical LP: Solving linear programs graphicallyIndah RiyadiNoch keine Bewertungen
- Daa 4 Unit DetailsDokument14 SeitenDaa 4 Unit DetailsSathyendra Kumar VNoch keine Bewertungen
- Negative Maximization: Engineering AnalysisDokument12 SeitenNegative Maximization: Engineering AnalysisYang Yew RenNoch keine Bewertungen
- 1 Iteration: - Continuing The ProblemDokument19 Seiten1 Iteration: - Continuing The ProblemÖzlem YurtseverNoch keine Bewertungen
- Math 20-1 Unit 7 TestDokument20 SeitenMath 20-1 Unit 7 Testapi-241648645Noch keine Bewertungen
- Linear Programming: Theory and ApplicationsDokument4 SeitenLinear Programming: Theory and ApplicationsAbhishek SinghNoch keine Bewertungen
- 8 Chapter 3 Graphical MethodDokument11 Seiten8 Chapter 3 Graphical MethoddureNoch keine Bewertungen
- Optimize Techniques for Math StudentsDokument76 SeitenOptimize Techniques for Math StudentsNikk TirthNoch keine Bewertungen
- Linear Programming Is The Simplest Way of Optimizing A ProblemDokument13 SeitenLinear Programming Is The Simplest Way of Optimizing A Problemgssgopi9_389290943Noch keine Bewertungen
- Sample Linear ProgrammingDokument37 SeitenSample Linear ProgrammingmarianaNoch keine Bewertungen
- Engineering Optimization and Production Planning ProblemsDokument28 SeitenEngineering Optimization and Production Planning ProblemsVikrant SharmaNoch keine Bewertungen
- Linear ProgrammingDokument54 SeitenLinear ProgrammingkatsandeNoch keine Bewertungen
- A-level Maths Revision: Cheeky Revision ShortcutsVon EverandA-level Maths Revision: Cheeky Revision ShortcutsBewertung: 3.5 von 5 Sternen3.5/5 (8)
- A Brief Introduction to MATLAB: Taken From the Book "MATLAB for Beginners: A Gentle Approach"Von EverandA Brief Introduction to MATLAB: Taken From the Book "MATLAB for Beginners: A Gentle Approach"Bewertung: 2.5 von 5 Sternen2.5/5 (2)
- Limits and Continuity (Calculus) Engineering Entrance Exams Question BankVon EverandLimits and Continuity (Calculus) Engineering Entrance Exams Question BankNoch keine Bewertungen
- BavDokument29 SeitenBavSwati Sucharita DasNoch keine Bewertungen
- Brand Identity Prism: Compact and Sleek. Logo: Jousting Knights. Colour: Red Classy, Dependable and BoldDokument1 SeiteBrand Identity Prism: Compact and Sleek. Logo: Jousting Knights. Colour: Red Classy, Dependable and BoldSwati Sucharita DasNoch keine Bewertungen
- Groups Count Sum Average VarianceDokument23 SeitenGroups Count Sum Average VarianceSwati Sucharita DasNoch keine Bewertungen
- 4Dokument12 Seiten4Swati Sucharita DasNoch keine Bewertungen
- MM ClassDokument21 SeitenMM ClassSwati Sucharita DasNoch keine Bewertungen
- Groups Count Sum Average VarianceDokument23 SeitenGroups Count Sum Average VarianceSwati Sucharita DasNoch keine Bewertungen
- 6 Causal Inference TechnicalDokument28 Seiten6 Causal Inference TechnicalSwati Sucharita DasNoch keine Bewertungen
- 1a - VISTARA Case For Brand Name DiscussionDokument4 Seiten1a - VISTARA Case For Brand Name DiscussionSwati Sucharita DasNoch keine Bewertungen
- Li FungDokument3 SeitenLi FungSwati Sucharita DasNoch keine Bewertungen
- SNAP 2014 Question Paper CetkingDokument6 SeitenSNAP 2014 Question Paper CetkingSwati Sucharita DasNoch keine Bewertungen
- BAR FileDokument5 SeitenBAR FileSwati Sucharita DasNoch keine Bewertungen
- Employment Contracts in IndiaDokument24 SeitenEmployment Contracts in IndiaAshwini PrabhakaranNoch keine Bewertungen
- SectionE Group4Dokument31 SeitenSectionE Group4Swati Sucharita DasNoch keine Bewertungen
- Chap 005Dokument15 SeitenChap 005David MurilloNoch keine Bewertungen
- B 2 BDokument213 SeitenB 2 BSwati Sucharita DasNoch keine Bewertungen
- Monte CarloDokument11 SeitenMonte CarloSwati Sucharita DasNoch keine Bewertungen
- Ch4 - MODokument52 SeitenCh4 - MOSwati Sucharita DasNoch keine Bewertungen
- DuraPro Group1Dokument14 SeitenDuraPro Group1Swati Sucharita DasNoch keine Bewertungen
- DataDokument1 SeiteDataSwati Sucharita DasNoch keine Bewertungen
- P&G Psychographics Lab Experiment SummaryDokument1 SeiteP&G Psychographics Lab Experiment SummaryHrishikesh MahapatraNoch keine Bewertungen
- Variable A (Ordinal) Variable B (Ordinal)Dokument2 SeitenVariable A (Ordinal) Variable B (Ordinal)Swati Sucharita DasNoch keine Bewertungen
- Monte CarloDokument11 SeitenMonte CarloSwati Sucharita DasNoch keine Bewertungen
- Data Refresh Sample DataDokument1 SeiteData Refresh Sample DataSwati Sucharita DasNoch keine Bewertungen
- DataDokument1 SeiteDataSwati Sucharita DasNoch keine Bewertungen
- Class 5 Company MeetingsDokument31 SeitenClass 5 Company MeetingsSwati Sucharita DasNoch keine Bewertungen
- B2B 6Dokument42 SeitenB2B 6Swati Sucharita DasNoch keine Bewertungen
- Chapter 24 - Negotiation and AssignmentDokument13 SeitenChapter 24 - Negotiation and AssignmentSwati Sucharita Das75% (4)
- Hamid Lecture For Process FlowDokument14 SeitenHamid Lecture For Process FlowOmkar PotnisNoch keine Bewertungen
- B2B ProjectDokument6 SeitenB2B ProjectSwati Sucharita DasNoch keine Bewertungen
- Aggregate Planning PPTsDokument43 SeitenAggregate Planning PPTsSwati Sucharita DasNoch keine Bewertungen
- Lashkari and Sarvaiya - Matlab Based Simulink Model of Phasor Measurement Unit and OptimalDokument4 SeitenLashkari and Sarvaiya - Matlab Based Simulink Model of Phasor Measurement Unit and OptimalJulio MendozaNoch keine Bewertungen
- Interpret The Key Results For Normal Capability Analysis - MinitabDokument3 SeitenInterpret The Key Results For Normal Capability Analysis - MinitabAnzari MuhammadNoch keine Bewertungen
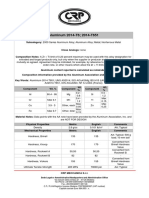
- Aluminium 2014 t6 2014 t651 PDFDokument3 SeitenAluminium 2014 t6 2014 t651 PDFAbhishek AnandNoch keine Bewertungen
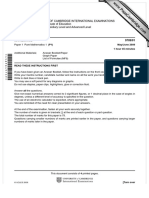
- University of Cambridge International Examinations General Certificate of Education Advanced Subsidiary Level and Advanced LevelDokument4 SeitenUniversity of Cambridge International Examinations General Certificate of Education Advanced Subsidiary Level and Advanced LevelKelvin SerimweNoch keine Bewertungen
- Thermodynamics and Kinetic Theory of Gases ConceptsDokument4 SeitenThermodynamics and Kinetic Theory of Gases ConceptsTarun GuptaNoch keine Bewertungen
- Effects of Results-Based Financing Intervention On Technical Efficiency of Health Services in AfghanistanDokument10 SeitenEffects of Results-Based Financing Intervention On Technical Efficiency of Health Services in AfghanistanNational Graduate ConferenceNoch keine Bewertungen
- Scale DrawingDokument13 SeitenScale DrawingAneek KumarNoch keine Bewertungen
- DEB-HAR-21-2018-2019-337-PPR-BACHELOR of COMPUTER ApplicationDokument26 SeitenDEB-HAR-21-2018-2019-337-PPR-BACHELOR of COMPUTER ApplicationAshok poddarNoch keine Bewertungen
- Ed Thorp - A Mathematician On Wall Street - Statistical ArbitrageDokument33 SeitenEd Thorp - A Mathematician On Wall Street - Statistical Arbitragenick ragoneNoch keine Bewertungen
- 2011 BDMS 4E Prelims 2 AM Paper 2Dokument25 Seiten2011 BDMS 4E Prelims 2 AM Paper 2Hui XiuNoch keine Bewertungen
- Blender API Docs: Python API OverviewDokument1.440 SeitenBlender API Docs: Python API Overview110218Noch keine Bewertungen
- SPH Bearing Draft 09.06.11Dokument39 SeitenSPH Bearing Draft 09.06.11pandeydbNoch keine Bewertungen
- 8 Antipatterns AssignmentDokument52 Seiten8 Antipatterns Assignmentdemelash kasayeNoch keine Bewertungen
- Chapter 3 Descriptive StatisticsDokument78 SeitenChapter 3 Descriptive StatisticsG Gጂጂ TubeNoch keine Bewertungen
- HARDER Developing The Formula 0.5 Ab SIN C For The Area of A TriangleDokument1 SeiteHARDER Developing The Formula 0.5 Ab SIN C For The Area of A TrianglejulucesNoch keine Bewertungen
- The Chi-Squared Test With TI-Nspire IB10Dokument5 SeitenThe Chi-Squared Test With TI-Nspire IB10p_gyftopoulosNoch keine Bewertungen
- Resume Cit PDFDokument1 SeiteResume Cit PDFJUNE CARLO ENCABONoch keine Bewertungen
- Salençon, J. and Pecker EC8 Foundation Bearing CapacityDokument20 SeitenSalençon, J. and Pecker EC8 Foundation Bearing CapacityYang LuNoch keine Bewertungen
- Jig Fix Handbook (Carr Lane)Dokument438 SeitenJig Fix Handbook (Carr Lane)Jobin GeorgeNoch keine Bewertungen
- Term1 Revision Core 2019Dokument6 SeitenTerm1 Revision Core 2019Unbox SamuraiNoch keine Bewertungen
- ES105 - Section I - Winter 2020 ExamDokument2 SeitenES105 - Section I - Winter 2020 ExamAadil VahoraNoch keine Bewertungen
- Combinational Circuit Lab GuideDokument10 SeitenCombinational Circuit Lab GuideHiếu ShidoNoch keine Bewertungen
- Cost EstimationDokument16 SeitenCost EstimationNagendran NatarajanNoch keine Bewertungen
- Computational Mathematics (Math 3221)Dokument3 SeitenComputational Mathematics (Math 3221)gidanoNoch keine Bewertungen
- Set No: 1: Code No: V3203/R07Dokument50 SeitenSet No: 1: Code No: V3203/R07Polireddi Gopala KrishnaNoch keine Bewertungen
- Trainer: Class 2Dokument13 SeitenTrainer: Class 2Kavita PatilNoch keine Bewertungen
- Assignment P&SDokument3 SeitenAssignment P&SShamun ZiaNoch keine Bewertungen
- Economic AnalysisDokument83 SeitenEconomic AnalysisAhmed Sayed0% (1)
- Pronominal Anaphora Resolution inDokument7 SeitenPronominal Anaphora Resolution inijfcstjournalNoch keine Bewertungen
- Determine natural convection heat transfer coefficientDokument4 SeitenDetermine natural convection heat transfer coefficientkoushikaerosNoch keine Bewertungen