Das könnte Ihnen auch gefallen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- Dual Axis Solar Tracker Using ArduinoDokument16 SeitenDual Axis Solar Tracker Using Arduinokanchan boneNoch keine Bewertungen
- Solar Tracker With Stepper Motor Control Using MicrocontrollerDokument2 SeitenSolar Tracker With Stepper Motor Control Using Microcontrollerieee4mybusinessonly100% (1)
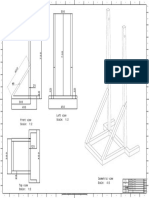
- 1:1 XXX A4: Toshavi 4/8/2016Dokument1 Seite1:1 XXX A4: Toshavi 4/8/2016suraj dhulannavarNoch keine Bewertungen
- 1210 5973Dokument17 Seiten1210 5973giridharsinghNoch keine Bewertungen
- FrameDokument1 SeiteFramesuraj dhulannavarNoch keine Bewertungen
- 1210 5973Dokument17 Seiten1210 5973giridharsinghNoch keine Bewertungen
- Ratchets 0101Dokument1 SeiteRatchets 0101kanchan boneNoch keine Bewertungen
- Model of Anti Roll Back System On Hilling Situation in Car-29317Dokument4 SeitenModel of Anti Roll Back System On Hilling Situation in Car-29317kanchan boneNoch keine Bewertungen
- Hill Station Breaking SystemDokument48 SeitenHill Station Breaking Systemkanchan bone80% (5)
- YyyyyyyyyyyyyyyyyyyyyyyyyDokument6 SeitenYyyyyyyyyyyyyyyyyyyyyyyyykanchan boneNoch keine Bewertungen
- Design of An Adaptive Headlights System For AutomobilesDokument6 SeitenDesign of An Adaptive Headlights System For Automobileskanchan boneNoch keine Bewertungen
- CALCULATION OF FOUR WAY POWER HACK SAW DESIGNDokument4 SeitenCALCULATION OF FOUR WAY POWER HACK SAW DESIGNkanchan bone80% (5)
- 978 1 58503 581 6 6Dokument21 Seiten978 1 58503 581 6 6Saravanan Srvn TNoch keine Bewertungen
- Head Light 1 PDFDokument5 SeitenHead Light 1 PDFkanchan boneNoch keine Bewertungen
- Detailed Project Report ON: Hybrid Solar Tray Dryer - 96 TraysDokument47 SeitenDetailed Project Report ON: Hybrid Solar Tray Dryer - 96 Trayskanchan boneNoch keine Bewertungen
- Mini Report-Reverse Braking SystemDokument25 SeitenMini Report-Reverse Braking Systemkanchan boneNoch keine Bewertungen
- Ecsecuritybased-Safety Auto Brake System For Hill Station Vehicle Using Mems Sensor.Dokument3 SeitenEcsecuritybased-Safety Auto Brake System For Hill Station Vehicle Using Mems Sensor.kanchan bone100% (1)
- Head Li8 + Hand Brake With CalculationsDokument32 SeitenHead Li8 + Hand Brake With Calculationskanchan boneNoch keine Bewertungen
- Material Selection Method in Design of Automotive Brake DiscDokument5 SeitenMaterial Selection Method in Design of Automotive Brake Discgustavitolp87Noch keine Bewertungen
- Fabrication of Electro Hydraulic Jack: International Research Journal of Engineering and Technology (IRJET)Dokument5 SeitenFabrication of Electro Hydraulic Jack: International Research Journal of Engineering and Technology (IRJET)kanchan boneNoch keine Bewertungen
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (265)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (119)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Installing Sis DVD 2012Dokument3 SeitenInstalling Sis DVD 2012Parts Catalogs100% (1)
- W461-E1-02 CP1E Introduction ManualDokument183 SeitenW461-E1-02 CP1E Introduction Manualtrandanhhai0% (1)
- 00 Folding Picnic Table DIY Out of 2x4 LumberDokument48 Seiten00 Folding Picnic Table DIY Out of 2x4 Lumberbf100% (2)
- 1 Apr 2013Dokument3 Seiten1 Apr 2013gerte_yuewNoch keine Bewertungen
- Freebitco.in Low Balance ScriptDokument2 SeitenFreebitco.in Low Balance ScriptTobias Krauser0% (1)
- User Guide SLF-H - 253255964-D - Ed.04 para ImprimirDokument114 SeitenUser Guide SLF-H - 253255964-D - Ed.04 para ImprimirpabloyarceNoch keine Bewertungen
- Datasheet Sensor Bently 3300 XL 8mmDokument14 SeitenDatasheet Sensor Bently 3300 XL 8mmCharles Matos0% (1)
- Ydd 324Dokument2 SeitenYdd 324Arif AnsariNoch keine Bewertungen
- Unit 4 Micro Controller 8051Dokument20 SeitenUnit 4 Micro Controller 8051Anbalagan Guru100% (1)
- 2 RRU DBS and BTS Introduction and Hardware Installation PDFDokument74 Seiten2 RRU DBS and BTS Introduction and Hardware Installation PDFikhlas boutayebNoch keine Bewertungen
- Manifolds Price ListDokument10 SeitenManifolds Price Listcadmold6561Noch keine Bewertungen
- Sandy Bridge CPU and Cougar Point PCH schematics documentDokument64 SeitenSandy Bridge CPU and Cougar Point PCH schematics documentArcangelo Di BattistaNoch keine Bewertungen
- Indexed allocation method solves problems of contiguous and linked allocationDokument2 SeitenIndexed allocation method solves problems of contiguous and linked allocationMashrekin HossainNoch keine Bewertungen
- 2N2369Dokument7 Seiten2N2369Martín SayagoNoch keine Bewertungen
- Bizhub C25 BrochureDokument4 SeitenBizhub C25 BrochureSunny SinghNoch keine Bewertungen
- Milling machine cutter holding arborDokument100 SeitenMilling machine cutter holding arborTempla KentNoch keine Bewertungen
- Cfs0018 UK R1 Menvier-Product-CatalogueDokument112 SeitenCfs0018 UK R1 Menvier-Product-CatalogueABELWALIDNoch keine Bewertungen
- Premier C Technical 4817av2 PDFDokument268 SeitenPremier C Technical 4817av2 PDFDrsetiawatiNoch keine Bewertungen
- Pega 7 CSA QuestionsDokument33 SeitenPega 7 CSA Questionsashock100% (1)
- OptiX OSN 8800 6800 3800 Troubleshooting (V100R007)Dokument342 SeitenOptiX OSN 8800 6800 3800 Troubleshooting (V100R007)Claudio Saez100% (1)
- Amazon Fire TV Ebook PDFDokument22 SeitenAmazon Fire TV Ebook PDFTilak ReddyNoch keine Bewertungen
- Duties and ResponsibilitiesDokument5 SeitenDuties and ResponsibilitiesRomelyn AngadolNoch keine Bewertungen
- My Resume 1Dokument2 SeitenMy Resume 1api-424783736Noch keine Bewertungen
- HX 220c m5 Specsheet PDFDokument64 SeitenHX 220c m5 Specsheet PDFJawad KhawajaNoch keine Bewertungen
- Java Notes After Mid 1Dokument13 SeitenJava Notes After Mid 1neha yarrapothuNoch keine Bewertungen
- Debian Linux Installation Rev2.5.1.6 X-1000 PDFDokument73 SeitenDebian Linux Installation Rev2.5.1.6 X-1000 PDFVojin VidanovicNoch keine Bewertungen
- Method Statement For Cable Containment For CablesDokument15 SeitenMethod Statement For Cable Containment For CablesshareyhouNoch keine Bewertungen
- Inside Intel Management EngineDokument41 SeitenInside Intel Management Engineemazitov-1Noch keine Bewertungen
- Sched LogDokument3 SeitenSched LogPavan Kumar MedepalliNoch keine Bewertungen
- Eaton Atc 300Dokument40 SeitenEaton Atc 300BrianHazeNoch keine Bewertungen