Das könnte Ihnen auch gefallen
- Piezo Electric Actuator Static DesignDokument9 SeitenPiezo Electric Actuator Static Designdon-donnolaNoch keine Bewertungen
- Theoretical Simulation of Damping Effect Base On Experimental MeasurementDokument6 SeitenTheoretical Simulation of Damping Effect Base On Experimental Measurementdon-donnolaNoch keine Bewertungen
- Thinkpad w520 ManualDokument178 SeitenThinkpad w520 Manualdon-donnolaNoch keine Bewertungen
- FEA Thermal ConceptsDokument12 SeitenFEA Thermal ConceptsramakrishnaingNoch keine Bewertungen
- Optical EncoderDokument5 SeitenOptical Encoderdon-donnolaNoch keine Bewertungen
- Takamaz Vibrating ToolsDokument1 SeiteTakamaz Vibrating Toolsdon-donnolaNoch keine Bewertungen
- Takamaz Vibrating ToolsDokument1 SeiteTakamaz Vibrating Toolsdon-donnolaNoch keine Bewertungen
- Solid Round Micro Cutting Tools CatalogDokument315 SeitenSolid Round Micro Cutting Tools Catalogdon-donnolaNoch keine Bewertungen
- This Is Neither A Simple Nor A Straightforward Computation ProcessDokument4 SeitenThis Is Neither A Simple Nor A Straightforward Computation ProcessNemanjaGlisicNoch keine Bewertungen
- Riverhawk FlexuralPivotSuggestedMethodofMountingDokument6 SeitenRiverhawk FlexuralPivotSuggestedMethodofMountingdon-donnolaNoch keine Bewertungen
- Naca CD StudiesDokument23 SeitenNaca CD Studiesdon-donnolaNoch keine Bewertungen
- Low Speed Wind TunnelDokument47 SeitenLow Speed Wind Tunneldfv91Noch keine Bewertungen
- Datasheet Cella CaricoDokument2 SeitenDatasheet Cella Caricodon-donnolaNoch keine Bewertungen
- Pavan IIT HyderabadDokument9 SeitenPavan IIT Hyderabaddon-donnolaNoch keine Bewertungen
- Dashpot Catalogue P11 LBDokument1 SeiteDashpot Catalogue P11 LBdon-donnolaNoch keine Bewertungen
- Power Spectral Density UnitsDokument8 SeitenPower Spectral Density UnitsEduardo GonnelliNoch keine Bewertungen
- A Meraghini Chemisky - PA66GF30 Composite - Effect of Relative HumidityDokument9 SeitenA Meraghini Chemisky - PA66GF30 Composite - Effect of Relative Humiditydon-donnolaNoch keine Bewertungen
- Romani Components - Guide A Rotelle Winnertek - UkDokument28 SeitenRomani Components - Guide A Rotelle Winnertek - Ukdon-donnolaNoch keine Bewertungen
- Isma2010 0104Dokument12 SeitenIsma2010 0104don-donnolaNoch keine Bewertungen
- Exercise 05 Gap Elements PDFDokument22 SeitenExercise 05 Gap Elements PDFdon-donnolaNoch keine Bewertungen
- Ray Tracing MontecarloDokument12 SeitenRay Tracing Montecarlodon-donnolaNoch keine Bewertungen
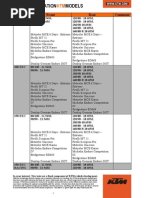
- Gomme Consigliate KTMDokument13 SeitenGomme Consigliate KTMdon-donnolaNoch keine Bewertungen
- Romani Components - Guide A Rotelle Winnertek - UkDokument28 SeitenRomani Components - Guide A Rotelle Winnertek - Ukdon-donnolaNoch keine Bewertungen
- Riverhawk FlexuralPivotEngineeringDataDokument16 SeitenRiverhawk FlexuralPivotEngineeringDatadon-donnolaNoch keine Bewertungen
- Suspension OilsDokument1 SeiteSuspension OilsmixajlochkaNoch keine Bewertungen
- NASA Space Vehicle Design Criteria for Buckling of Thin-Walled CylindersDokument56 SeitenNASA Space Vehicle Design Criteria for Buckling of Thin-Walled CylindersSJLeemansNoch keine Bewertungen
- A Shiboto Bozlur Fukumoto Effects of Injection Temperature On Mechanical Properties of Polypropilene CompositesDokument15 SeitenA Shiboto Bozlur Fukumoto Effects of Injection Temperature On Mechanical Properties of Polypropilene Compositesdon-donnolaNoch keine Bewertungen
- AA Phelps Rahman - Model For Fiber Length Attrition in Injection-MoldingDokument11 SeitenAA Phelps Rahman - Model For Fiber Length Attrition in Injection-Moldingdon-donnolaNoch keine Bewertungen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5784)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (890)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (587)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (265)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (72)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (119)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Ma 6410Dokument52 SeitenMa 6410mahajoonNoch keine Bewertungen
- E3Dv5 Assembly ManualDokument3 SeitenE3Dv5 Assembly ManualgeopapaNoch keine Bewertungen
- Datasheet L293D Moter DriverDokument19 SeitenDatasheet L293D Moter DriverforeceNoch keine Bewertungen
- H70EDokument2 SeitenH70ENaveenNoch keine Bewertungen
- GBJ25MDokument2 SeitenGBJ25MVinod DawraNoch keine Bewertungen
- Vishay Sfernice: FeaturesDokument5 SeitenVishay Sfernice: FeaturesteoilcaNoch keine Bewertungen
- Citizen Led CLU048-1212C4Dokument15 SeitenCitizen Led CLU048-1212C4lucas786Noch keine Bewertungen
- A Practical Method For Measurement of High-Power LEDsDokument14 SeitenA Practical Method For Measurement of High-Power LEDsberker_yurtsevenNoch keine Bewertungen
- 32lf56 Service ManualDokument56 Seiten32lf56 Service ManualpatoraNoch keine Bewertungen
- 32ln57xx 32ln570b 32ln571b 32ln572b Chassis lb33bDokument119 Seiten32ln57xx 32ln570b 32ln571b 32ln572b Chassis lb33bJerald D'costaNoch keine Bewertungen
- Estimating Heat Sink Thermal ResistanceDokument6 SeitenEstimating Heat Sink Thermal ResistanceRAHUL VEERNoch keine Bewertungen
- 450 Watt 6m Amplifier: Chris, G3WOS - July 1993Dokument10 Seiten450 Watt 6m Amplifier: Chris, G3WOS - July 1993Adrian DrakesNoch keine Bewertungen
- Lecture 4Dokument26 SeitenLecture 4Mesbahose SalekeenNoch keine Bewertungen
- LG 49UB8500 CH LA41VDokument123 SeitenLG 49UB8500 CH LA41VDarcio TolottiNoch keine Bewertungen
- Jesd51 6Dokument20 SeitenJesd51 6Daniel BeattieNoch keine Bewertungen
- Introducing The 3L Small Form FactorDokument10 SeitenIntroducing The 3L Small Form FactorzdjulicgmailcomNoch keine Bewertungen
- Application of Earth Tube Heat Exchanger and Solar Chimney For Natural Cooling System in Basrah CityDokument10 SeitenApplication of Earth Tube Heat Exchanger and Solar Chimney For Natural Cooling System in Basrah CityaishaNoch keine Bewertungen
- 12v DC Geared MotorDokument57 Seiten12v DC Geared Motorpeper8Noch keine Bewertungen
- Ledsmagazine Abrmay2013Dokument80 SeitenLedsmagazine Abrmay2013henlopNoch keine Bewertungen
- 12092Dokument53 Seiten12092rfcbaccaratNoch keine Bewertungen
- Peltier Cooling ModuleDokument43 SeitenPeltier Cooling ModuleVenkatesh MohanNoch keine Bewertungen
- Ad 22105Dokument8 SeitenAd 22105nevdullNoch keine Bewertungen
- Chapter 7 Thermal DesignDokument28 SeitenChapter 7 Thermal DesignettypasewangNoch keine Bewertungen
- Iomm VFD-3 030112Dokument100 SeitenIomm VFD-3 030112Alexander100% (1)
- COMSOL HANDBOOK SERIES Essentials of Postprocessing and Visualization 5.1Dokument36 SeitenCOMSOL HANDBOOK SERIES Essentials of Postprocessing and Visualization 5.1Mustafa DemircioğluNoch keine Bewertungen
- Led TV: Service ManualDokument75 SeitenLed TV: Service ManualGabriel GriecoNoch keine Bewertungen
- TEE3211 DrivesDokument126 SeitenTEE3211 DrivesWebster Fungirai100% (1)
- 5 EduPack Projects 2010Dokument57 Seiten5 EduPack Projects 2010Neeraja ManemNoch keine Bewertungen
- Needle Heating.Dokument46 SeitenNeedle Heating.Rahul RajNoch keine Bewertungen
- PDF Luminus CST90Dokument14 SeitenPDF Luminus CST90Julio Cesar Desales SerranoNoch keine Bewertungen