Das könnte Ihnen auch gefallen
- The History of Visual Magic in Computers: How Beautiful Images are Made in CAD, 3D, VR and ARVon EverandThe History of Visual Magic in Computers: How Beautiful Images are Made in CAD, 3D, VR and ARNoch keine Bewertungen
- Foldio - Digital Fabrication of Interactive and ShapeChanging Objects With Foldable Printed ElectronicsDokument10 SeitenFoldio - Digital Fabrication of Interactive and ShapeChanging Objects With Foldable Printed ElectronicsSiennaNoch keine Bewertungen
- Interactive Construction Interactive Fab PDFDokument8 SeitenInteractive Construction Interactive Fab PDFNada GhammemNoch keine Bewertungen
- 3D Printed Face ShieldDokument8 Seiten3D Printed Face ShieldIJRASETPublicationsNoch keine Bewertungen
- Zeron Jinha LeeDokument10 SeitenZeron Jinha LeeJesús Del Río RodríguezNoch keine Bewertungen
- Overview of Computer GraphicsDokument182 SeitenOverview of Computer GraphicsNoorul AlamNoch keine Bewertungen
- 3d Printing Un Curso IntroductorioDokument11 Seiten3d Printing Un Curso Introductoriojeff maleNoch keine Bewertungen
- 1 General: Fig. 1.1 Industrial RobotDokument40 Seiten1 General: Fig. 1.1 Industrial RobotArunNoch keine Bewertungen
- Chapter - 1 General: Fig. 1.1 Industrial RobotDokument40 SeitenChapter - 1 General: Fig. 1.1 Industrial RobotArunNoch keine Bewertungen
- Designing Interactive Paper: Lessons From Three Augmented Reality ProjectsDokument4 SeitenDesigning Interactive Paper: Lessons From Three Augmented Reality ProjectsSuci Balqisa QuratuainNoch keine Bewertungen
- ifm2019TheDigitalThreadinIndustry40 PDFDokument22 Seitenifm2019TheDigitalThreadinIndustry40 PDFsivaa hzNoch keine Bewertungen
- Experience: Civil 3D 2008 WorkshopDokument30 SeitenExperience: Civil 3D 2008 WorkshopSaul AguilarNoch keine Bewertungen
- CHI2013 Flexpad PDFDokument10 SeitenCHI2013 Flexpad PDFIgbani VictoryNoch keine Bewertungen
- FT Gateway - CFMDokument10 SeitenFT Gateway - CFMVivian RuizNoch keine Bewertungen
- Actuators 11 00200Dokument12 SeitenActuators 11 00200Ebrahim AwadNoch keine Bewertungen
- Gummi: A Bendable Computer: Carsten Schwesig Ivan Poupyrev Eijiro MoriDokument8 SeitenGummi: A Bendable Computer: Carsten Schwesig Ivan Poupyrev Eijiro Moriviệt lê quốcNoch keine Bewertungen
- 3d PrintingDokument20 Seiten3d PrintingDulce DeNoch keine Bewertungen
- Multimodal Interaction With A Wearable Augmented Reality SystemDokument10 SeitenMultimodal Interaction With A Wearable Augmented Reality SystemJose Pardo Vera-TudelaNoch keine Bewertungen
- Cloud Computing and 3D PrintingDokument8 SeitenCloud Computing and 3D PrintingSaurabh KadamNoch keine Bewertungen
- Implementing Security in Fog ComputingDokument7 SeitenImplementing Security in Fog ComputingIJRASETPublicationsNoch keine Bewertungen
- A 3D Fax Machine Based On ClaytronicsDokument8 SeitenA 3D Fax Machine Based On ClaytronicsSiya VermaNoch keine Bewertungen
- 3 D Printing TechnologyDokument17 Seiten3 D Printing TechnologyClassic PrintersNoch keine Bewertungen
- 3D Graphical User InterfacesDokument50 Seiten3D Graphical User InterfacesSeshu KelamNoch keine Bewertungen
- IJRET20160516038Dokument4 SeitenIJRET20160516038Youssef AliNoch keine Bewertungen
- Tactum: A Skin-Centric Approach To Digital Design and FabricationDokument10 SeitenTactum: A Skin-Centric Approach To Digital Design and FabricationworkmanjNoch keine Bewertungen
- Iot-Fog-Cloud Based Architecture For Smart City: Prototype of A Smart BuildingDokument7 SeitenIot-Fog-Cloud Based Architecture For Smart City: Prototype of A Smart BuildingEbrahimi MJNoch keine Bewertungen
- Smartoffice:: An Intelligent and Interactive EnvironmentDokument2 SeitenSmartoffice:: An Intelligent and Interactive EnvironmentMuhammad Iqbal FarhanNoch keine Bewertungen
- NW N AndroidDokument44 SeitenNW N AndroidPrathipa DeenaNoch keine Bewertungen
- Point Cloud Thesis PDFDokument5 SeitenPoint Cloud Thesis PDFdeborahquintanaalbuquerque100% (2)
- Manufacturing Letters: Sebastian Haag, Reiner AnderlDokument3 SeitenManufacturing Letters: Sebastian Haag, Reiner AnderlPaulo RenatoNoch keine Bewertungen
- APM Additive Manufacturing FinalDokument4 SeitenAPM Additive Manufacturing FinalAnish KumarNoch keine Bewertungen
- Microproject Proposal ON 3D HouseDokument8 SeitenMicroproject Proposal ON 3D Housegirish desai100% (1)
- Computer Graphics Notes PDFDokument192 SeitenComputer Graphics Notes PDFHarshit JindalNoch keine Bewertungen
- 1 s2.0 S2213846318300208 MainDokument3 Seiten1 s2.0 S2213846318300208 MainDr. KAVITHA. R SASTRANoch keine Bewertungen
- Computer Graphics Note by Maruti DhunganaDokument120 SeitenComputer Graphics Note by Maruti DhunganaShiva BaralNoch keine Bewertungen
- 3D Printing - Wikipedia, The Free EncyclopediaDokument23 Seiten3D Printing - Wikipedia, The Free EncyclopediaSandra MeyersNoch keine Bewertungen
- Virtual Reality Is A Recent Trend in Mechanical and Electical Eng.Dokument8 SeitenVirtual Reality Is A Recent Trend in Mechanical and Electical Eng.sidra tulmuntahaNoch keine Bewertungen
- 3d Printing of Buildung Report FZDokument29 Seiten3d Printing of Buildung Report FZMd FayazuddinNoch keine Bewertungen
- BMMA111P Laguilles Research01Dokument2 SeitenBMMA111P Laguilles Research01Chan LaguillesNoch keine Bewertungen
- 3D PrintingDokument9 Seiten3D Printingsuhail iqbalNoch keine Bewertungen
- Smart Wheel Chair For Visually Impaired PersonDokument32 SeitenSmart Wheel Chair For Visually Impaired Personrohit a bhosaleNoch keine Bewertungen
- Smart 3d Interop White PaperDokument26 SeitenSmart 3d Interop White PaperNico Van HoofNoch keine Bewertungen
- Report On 3d InternetDokument7 SeitenReport On 3d InternetNeha AgarwalNoch keine Bewertungen
- 3D-Printing: A Promising Technology To Design Three-Dimensional MicrosystemsDokument5 Seiten3D-Printing: A Promising Technology To Design Three-Dimensional MicrosystemsdannyNoch keine Bewertungen
- Cad-Cam Lab Manual 2022-23manualDokument63 SeitenCad-Cam Lab Manual 2022-23manualMvk MvkNoch keine Bewertungen
- 3D Printing: TerminologyDokument10 Seiten3D Printing: TerminologyKelvin Dale YubidiNoch keine Bewertungen
- IoT Unit 5Dokument2 SeitenIoT Unit 5Akshat SaxenaNoch keine Bewertungen
- 3d Modeling For The Architectural Engineering andDokument7 Seiten3d Modeling For The Architectural Engineering andicNoch keine Bewertungen
- Unit 5 - Internet of Things - WWW - Rgpvnotes.inDokument16 SeitenUnit 5 - Internet of Things - WWW - Rgpvnotes.inVinutha MNoch keine Bewertungen
- A Personal Projected Display: Mark Ashdown Peter RobinsonDokument2 SeitenA Personal Projected Display: Mark Ashdown Peter RobinsonBennie M MartinNoch keine Bewertungen
- Additive Manufacturing: A Mini-Project ReportDokument8 SeitenAdditive Manufacturing: A Mini-Project ReportArchit BathriNoch keine Bewertungen
- 4dprintingtechnology 161024141528Dokument19 Seiten4dprintingtechnology 161024141528saumya saxenaNoch keine Bewertungen
- Van Laethem 2011Dokument26 SeitenVan Laethem 2011Szabolcs BeczeNoch keine Bewertungen
- Seminar Report On 3D PrintingDokument20 SeitenSeminar Report On 3D PrintingArchitbhardwaj13Noch keine Bewertungen
- New Challenges in Collaborative Virtual Factory DesignDokument9 SeitenNew Challenges in Collaborative Virtual Factory Design박보국Noch keine Bewertungen
- Tutorial CGASEDokument18 SeitenTutorial CGASEoipiniNoch keine Bewertungen
- 3D PrintingDokument21 Seiten3D Printinghellgate.vishesh25Noch keine Bewertungen
- WRL Research Report 91/6: Don't Fidget With Widgets, Draw!Dokument39 SeitenWRL Research Report 91/6: Don't Fidget With Widgets, Draw!ecraven7Noch keine Bewertungen
- Swot AnalysisDokument16 SeitenSwot AnalysisAneelaMalikNoch keine Bewertungen
- Manual T3DS SoftwareDokument19 SeitenManual T3DS SoftwareEgoitzNoch keine Bewertungen
- Manual THZ KitDokument14 SeitenManual THZ KitEgoitzNoch keine Bewertungen
- VENECIADokument54 SeitenVENECIAEgoitzNoch keine Bewertungen
- (D7d0d0a4 849e 4d4a 87ed 2cb0237317e4) Intel Analytics Planning Guide FinalDokument13 Seiten(D7d0d0a4 849e 4d4a 87ed 2cb0237317e4) Intel Analytics Planning Guide FinalEgoitzNoch keine Bewertungen
- El Capitan Alatriste Rules TranslationDokument9 SeitenEl Capitan Alatriste Rules TranslationEgoitzNoch keine Bewertungen
- Tattio: Fabrication of Aesthetic and Functional Temporary TattoosDokument4 SeitenTattio: Fabrication of Aesthetic and Functional Temporary TattoosEgoitzNoch keine Bewertungen
- GC120 Outline Rev SGDokument2 SeitenGC120 Outline Rev SGsong perezNoch keine Bewertungen
- DR - NOOR ZAMAN - Short - CV - +9665966117159Dokument17 SeitenDR - NOOR ZAMAN - Short - CV - +9665966117159Noor ZamanNoch keine Bewertungen
- User Manual - Mode 7Dokument11 SeitenUser Manual - Mode 7Dipstick072Noch keine Bewertungen
- Field BusDokument41 SeitenField BussabinashyjiNoch keine Bewertungen
- Installing Computer Systems and Network.Dokument72 SeitenInstalling Computer Systems and Network.Justin BurnNoch keine Bewertungen
- Mapeh 10Dokument31 SeitenMapeh 10John Thiery FedericoNoch keine Bewertungen
- Voucher-FAIZ NET-5-JAM-up-744-06.01.23-Surabaye71Dokument9 SeitenVoucher-FAIZ NET-5-JAM-up-744-06.01.23-Surabaye71Azka pixelNoch keine Bewertungen
- cs298 Report Dhillon Ravi PDFDokument61 Seitencs298 Report Dhillon Ravi PDFALOKIK YADAVNoch keine Bewertungen
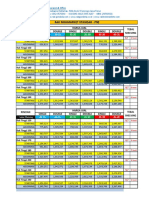
- Rak Minimarket Standar - P90: Single Double Single Double Single Double Rincian Harga Jual Tebal ShelvingDokument6 SeitenRak Minimarket Standar - P90: Single Double Single Double Single Double Rincian Harga Jual Tebal ShelvingAndi HadisaputraNoch keine Bewertungen
- Kubernetes Threat ModelDokument56 SeitenKubernetes Threat ModelSudeep BatraNoch keine Bewertungen
- 885Hpchv Am Kgwzazh'eacaou: FHVG 5?Dokument75 Seiten885Hpchv Am Kgwzazh'eacaou: FHVG 5?fatihwardakNoch keine Bewertungen
- Atoms: © 2016 Shape SoftwareDokument248 SeitenAtoms: © 2016 Shape SoftwareAlexandra MalaicuNoch keine Bewertungen
- Eradist and Eranataf Classes: Documentation and ExamplesDokument12 SeitenEradist and Eranataf Classes: Documentation and ExamplesJoshua SNoch keine Bewertungen
- Heap and HashtableDokument7 SeitenHeap and HashtableAnonymous IhmXvCHj3cNoch keine Bewertungen
- Trends and Advancement in WWWDokument14 SeitenTrends and Advancement in WWWDilna bhadranNoch keine Bewertungen
- Dowody Do SkargiDokument6 SeitenDowody Do Skargisimom 123Noch keine Bewertungen
- Release Notes Csi Bridge 2017 V 1900Dokument9 SeitenRelease Notes Csi Bridge 2017 V 1900Ihab El AghouryNoch keine Bewertungen
- Gosia Manual 20110730Dokument294 SeitenGosia Manual 20110730crysela1207Noch keine Bewertungen
- 4.0 Dialing PlanDokument12 Seiten4.0 Dialing Plandragelec100% (1)
- An R Package For High-Frequency TradersDokument24 SeitenAn R Package For High-Frequency TradersFabianMontescuNoch keine Bewertungen
- Fundamental of Computer - OdtDokument2 SeitenFundamental of Computer - OdtKoti NayakNoch keine Bewertungen
- Computer Studies Form 1 Schemes of WorkDokument14 SeitenComputer Studies Form 1 Schemes of Workvusani ndlovuNoch keine Bewertungen
- Csc101 Ict Lab Manual v2.0Dokument117 SeitenCsc101 Ict Lab Manual v2.0Asjad HashmiNoch keine Bewertungen
- Keo ReportDokument22 SeitenKeo ReportJoshua EvansNoch keine Bewertungen
- Ali Hammoud: Web Company - DOTCOMDokument2 SeitenAli Hammoud: Web Company - DOTCOMSuvendu BishoyiNoch keine Bewertungen
- Fujitsu Lifebook A530Dokument87 SeitenFujitsu Lifebook A530Tomasz SkrzypińskiNoch keine Bewertungen
- Gage Maker CatalogDokument156 SeitenGage Maker CatalogRSR_2K5364100% (2)
- CNS-223-1I Implement Citrix ADC 13.x: Getting Started Lab ManualDokument24 SeitenCNS-223-1I Implement Citrix ADC 13.x: Getting Started Lab ManualМаријан СтанићNoch keine Bewertungen
- BF4 PC Server AdministrationDokument12 SeitenBF4 PC Server AdministrationDante Alamo100% (1)
- Viettel 3G Project: Umts WcdmaDokument65 SeitenViettel 3G Project: Umts WcdmaTú Nguyễn NgọcNoch keine Bewertungen