Das könnte Ihnen auch gefallen
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- 25+ Tricky SAP BODS Interview Questions 3Dokument1 Seite25+ Tricky SAP BODS Interview Questions 3pattabhikvNoch keine Bewertungen
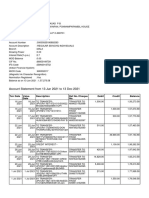
- Account Statement From 13 Jun 2021 To 13 Dec 2021Dokument10 SeitenAccount Statement From 13 Jun 2021 To 13 Dec 2021Syamprasad P BNoch keine Bewertungen
- CS201 Introduction To Programming Solved MID Term Paper 03Dokument4 SeitenCS201 Introduction To Programming Solved MID Term Paper 03ayesharahimNoch keine Bewertungen
- Priority ConservationDokument6 SeitenPriority Conservationapi-213428788Noch keine Bewertungen
- EF4e Int EndtestB AnswersheetDokument2 SeitenEF4e Int EndtestB AnswersheetB Mc0% (1)
- SuperDokument21 SeitenSuperSafalsha BabuNoch keine Bewertungen
- NBCDokument27 SeitenNBCSafalsha BabuNoch keine Bewertungen
- Wing-In-ground-effect Craft A Case Study in AerodyDokument5 SeitenWing-In-ground-effect Craft A Case Study in AerodySafalsha BabuNoch keine Bewertungen
- Super ReportDokument21 SeitenSuper ReportSafalsha BabuNoch keine Bewertungen
- CRDokument17 SeitenCRSafalsha BabuNoch keine Bewertungen
- ThedDokument15 SeitenThedSafalsha BabuNoch keine Bewertungen
- Transport Airplane, Which Is Purposely Deemed To Exploit Ground-Effect (8) - Some GroundDokument14 SeitenTransport Airplane, Which Is Purposely Deemed To Exploit Ground-Effect (8) - Some GroundSafalsha BabuNoch keine Bewertungen
- Awh Polytechnic College: Seminar ReportDokument6 SeitenAwh Polytechnic College: Seminar ReportSafalsha BabuNoch keine Bewertungen
- NafihDokument6 SeitenNafihSafalsha BabuNoch keine Bewertungen
- DynaDokument19 SeitenDynaSafalsha BabuNoch keine Bewertungen
- SuperadobeDokument27 SeitenSuperadobeSafalsha BabuNoch keine Bewertungen
- SeminarDokument52 SeitenSeminarSafalsha BabuNoch keine Bewertungen
- SreenathDokument6 SeitenSreenathSafalsha BabuNoch keine Bewertungen
- Ece Free Space OpticsDokument14 SeitenEce Free Space OpticsSafalsha BabuNoch keine Bewertungen
- The Design and Fabrication of An Improved Diesel Powered Hydraulic Red Brick Molding MachineDokument8 SeitenThe Design and Fabrication of An Improved Diesel Powered Hydraulic Red Brick Molding MachineSafalsha BabuNoch keine Bewertungen
- Cryogenic Materials and Circuit Integration For Quantum ComputersDokument15 SeitenCryogenic Materials and Circuit Integration For Quantum ComputersSafalsha BabuNoch keine Bewertungen
- Chapter 1Dokument17 SeitenChapter 1Safalsha BabuNoch keine Bewertungen
- Heat SinkDokument14 SeitenHeat SinkSafalsha BabuNoch keine Bewertungen
- MUHAMMED - ASHIQ PT - Resume - 02-02-2023-13-23-28Dokument1 SeiteMUHAMMED - ASHIQ PT - Resume - 02-02-2023-13-23-28Safalsha BabuNoch keine Bewertungen
- SeminarDokument2 SeitenSeminarSafalsha BabuNoch keine Bewertungen
- SeminarDokument28 SeitenSeminarSafalsha BabuNoch keine Bewertungen
- 2Dokument18 Seiten2Safalsha BabuNoch keine Bewertungen
- SeminarDokument1 SeiteSeminarSafalsha BabuNoch keine Bewertungen
- SeminarDokument1 SeiteSeminarSafalsha BabuNoch keine Bewertungen
- SeminarDokument16 SeitenSeminarSafalsha BabuNoch keine Bewertungen
- SeminarDokument21 SeitenSeminarSafalsha BabuNoch keine Bewertungen
- SeminarDokument21 SeitenSeminarSafalsha BabuNoch keine Bewertungen
- SeminarDokument3 SeitenSeminarSafalsha BabuNoch keine Bewertungen
- SeminarDokument4 SeitenSeminarSafalsha BabuNoch keine Bewertungen
- SeminarDokument1 SeiteSeminarSafalsha BabuNoch keine Bewertungen
- Physics II ProblemsDokument1 SeitePhysics II ProblemsBOSS BOSSNoch keine Bewertungen
- sjzl20070793-NetNumen M3 (ZXC10 BSSB) (V 3.08.19.01) Software Installation Manual (Windows) PDFDokument243 Seitensjzl20070793-NetNumen M3 (ZXC10 BSSB) (V 3.08.19.01) Software Installation Manual (Windows) PDFGus RodriguezNoch keine Bewertungen
- Udemy Bonus LecturesDokument3 SeitenUdemy Bonus LecturesAbhishekNoch keine Bewertungen
- Harshitha C P ResumeDokument3 SeitenHarshitha C P ResumeHarshitha C PNoch keine Bewertungen
- VSPlayer V7.2.0 - ENDokument27 SeitenVSPlayer V7.2.0 - ENGiNoch keine Bewertungen
- CCNA Exploration 2 - Module 4 Exam Answers Version 4.0Dokument3 SeitenCCNA Exploration 2 - Module 4 Exam Answers Version 4.0fun kollaNoch keine Bewertungen
- Basic Nonlinear Analysis User's Guide: Siemens Siemens SiemensDokument144 SeitenBasic Nonlinear Analysis User's Guide: Siemens Siemens Siemensபென்ஸிஹர்Noch keine Bewertungen
- Advances in Computer NetworkDokument26 SeitenAdvances in Computer NetworkSandesh RameshNoch keine Bewertungen
- R-PLS Path Modeling ExampleDokument8 SeitenR-PLS Path Modeling ExamplemagargieNoch keine Bewertungen
- Seismic Processing - Noise Attenuation Techniques PDFDokument3 SeitenSeismic Processing - Noise Attenuation Techniques PDFDavid Karel AlfonsNoch keine Bewertungen
- Threat Analysis ReportDokument18 SeitenThreat Analysis Reporttodo nothingNoch keine Bewertungen
- Ransomware Ctep Situation Manual Ncep 072022 508 - 0Dokument30 SeitenRansomware Ctep Situation Manual Ncep 072022 508 - 0piash007_571387617Noch keine Bewertungen
- "C:/Users/user1/Desktop/Practice" "C:/Users/user1/Desktop/Practice/HR - Comma - Sep - CSV" ','Dokument1 Seite"C:/Users/user1/Desktop/Practice" "C:/Users/user1/Desktop/Practice/HR - Comma - Sep - CSV" ','ShubhamJainNoch keine Bewertungen
- Design and Implementation The LLC Resonant TransformerDokument3 SeitenDesign and Implementation The LLC Resonant TransformerMathe ZsoltNoch keine Bewertungen
- Pune Institute of Computer Technology PUNE - 411043 Department of Electronics & TelecommunicationDokument12 SeitenPune Institute of Computer Technology PUNE - 411043 Department of Electronics & TelecommunicationNakul SharmaNoch keine Bewertungen
- Manual Elisys DuoDokument322 SeitenManual Elisys DuoLeydi Johana Guerra SuazaNoch keine Bewertungen
- B.inggris Bill GatesDokument1 SeiteB.inggris Bill GatesRoy Wijaya SembiringNoch keine Bewertungen
- Proposal SampleDokument33 SeitenProposal SampleMichael MesfinNoch keine Bewertungen
- Ali Gohar & CompanyDokument4 SeitenAli Gohar & CompanyAbdul RafayNoch keine Bewertungen
- Intercepting #Ajax Requests in #CEFSharp (Chrome For C#) Network Programming inDokument8 SeitenIntercepting #Ajax Requests in #CEFSharp (Chrome For C#) Network Programming inFaisal Tifta ZanyNoch keine Bewertungen
- Amoeba: A Distributed Operating System For TheDokument10 SeitenAmoeba: A Distributed Operating System For Thepou testeshitNoch keine Bewertungen
- DBMS FileDokument76 SeitenDBMS FileJeremy MontgomeryNoch keine Bewertungen
- Can Internal Excellence Be Measured - DeshpandeDokument11 SeitenCan Internal Excellence Be Measured - DeshpandeFelipeNoch keine Bewertungen
- Find The Coordinates of Every Square: Naval Grid CalculatorDokument2 SeitenFind The Coordinates of Every Square: Naval Grid CalculatorMarie MythosNoch keine Bewertungen
- VarAC V8.0.6 Is Here! With Path Finder, Simple - Advanced UI Mode, Offline Image Shrinker, UI Themes and Much MoreDokument7 SeitenVarAC V8.0.6 Is Here! With Path Finder, Simple - Advanced UI Mode, Offline Image Shrinker, UI Themes and Much MoreuwpowerNoch keine Bewertungen