Das könnte Ihnen auch gefallen
- Feedback Control SystemDokument40 SeitenFeedback Control SystemMuhammad SaeedNoch keine Bewertungen
- Analysis Using Laplace Function 3Dokument33 SeitenAnalysis Using Laplace Function 3hafidahnsNoch keine Bewertungen
- Conventional Trunked Radio Systems Comparison ReportDokument68 SeitenConventional Trunked Radio Systems Comparison Reportmade_pmj100% (1)
- FabFilter Pro Q2Dokument43 SeitenFabFilter Pro Q2AdrianNoch keine Bewertungen
- Lecture 20 of Goertzel AlgoDokument4 SeitenLecture 20 of Goertzel Algoc_mc2Noch keine Bewertungen
- Stability Analysis of Nonlinear Systems Using Lyapunov Theory - IDokument28 SeitenStability Analysis of Nonlinear Systems Using Lyapunov Theory - IGurpreet KaurNoch keine Bewertungen
- Block Diagram ReductionDokument26 SeitenBlock Diagram Reductionmamnd tahaNoch keine Bewertungen
- CISE 316 Control Systems Design Lab ManualDokument78 SeitenCISE 316 Control Systems Design Lab Manualnirmal_inbox100% (1)
- Data CommunicationDokument22 SeitenData CommunicationShayaan Pappathi0% (1)
- Control MCQDokument11 SeitenControl MCQravihbtiNoch keine Bewertungen
- Investigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsVon EverandInvestigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsNoch keine Bewertungen
- Spacecraft Attitude Control: A Linear Matrix Inequality ApproachVon EverandSpacecraft Attitude Control: A Linear Matrix Inequality ApproachNoch keine Bewertungen
- Measurements and InstrumentationDokument54 SeitenMeasurements and InstrumentationVikas PsNoch keine Bewertungen
- Eee.60-62Dokument3 SeitenEee.60-62skrtamilNoch keine Bewertungen
- Engineering ElectromagneticsDokument19 SeitenEngineering Electromagneticsأحمد دعبسNoch keine Bewertungen
- Control-System MCQDokument125 SeitenControl-System MCQSanthosh KumarNoch keine Bewertungen
- Lecture-Notes (Shafi Goldwasser)Dokument289 SeitenLecture-Notes (Shafi Goldwasser)Nasim ArshadNoch keine Bewertungen
- Electrical Circuits LabDokument64 SeitenElectrical Circuits LabraveendrababupNoch keine Bewertungen
- IIR FilterDokument26 SeitenIIR FilterKyax Ginaheeq100% (1)
- Control System Question BankDokument3 SeitenControl System Question Bankmanish_iitrNoch keine Bewertungen
- Fundamentals of Electronics 2: Continuous-time Signals and SystemsVon EverandFundamentals of Electronics 2: Continuous-time Signals and SystemsNoch keine Bewertungen
- Electronic System Design LabDokument25 SeitenElectronic System Design Labsramiz_1987Noch keine Bewertungen
- EMG Machine AmplifierDokument12 SeitenEMG Machine AmplifierShauki AliNoch keine Bewertungen
- Communications Test YourselfDokument35 SeitenCommunications Test Yourselfpatrick0308Noch keine Bewertungen
- Example of Block Diagram ReductionDokument17 SeitenExample of Block Diagram Reductionmhd badhrul bin baharNoch keine Bewertungen
- Reduction of Multiple SubsystemsDokument28 SeitenReduction of Multiple SubsystemsDian Riana MustafaNoch keine Bewertungen
- Electronics & CommunicationDokument146 SeitenElectronics & Communicationsuhaspatel840% (2)
- EMI Class Notes Assignment 1Dokument2 SeitenEMI Class Notes Assignment 1Praneshvar Praneshvar50% (2)
- MCQ On Digital Signal ProcessingDokument3 SeitenMCQ On Digital Signal ProcessingIra MinochaNoch keine Bewertungen
- UNIT I, II, III, IV, V Notes PDFDokument93 SeitenUNIT I, II, III, IV, V Notes PDFThiagu RajivNoch keine Bewertungen
- Computer Science and Engineering 1st YearDokument11 SeitenComputer Science and Engineering 1st YearGolamSarwarNoch keine Bewertungen
- CIRCUIT Analysis QB 20 21Dokument44 SeitenCIRCUIT Analysis QB 20 216112 Shanmuga priyanNoch keine Bewertungen
- Lab Manual - TheoryDokument49 SeitenLab Manual - TheoryLovely VinayNoch keine Bewertungen
- Senior Class FormulaeDokument8 SeitenSenior Class FormulaeOP GuptaNoch keine Bewertungen
- MCQS (Control)Dokument304 SeitenMCQS (Control)IMRAN KHANNoch keine Bewertungen
- Chapter 6Dokument20 SeitenChapter 6Duncan KingNoch keine Bewertungen
- Lecture Notes: Digital Logic DesignDokument66 SeitenLecture Notes: Digital Logic DesignJyoti GroverNoch keine Bewertungen
- Chapter 2: Mathematical Modelling of Translational Mechanical SystemDokument8 SeitenChapter 2: Mathematical Modelling of Translational Mechanical SystemNoor Nadiah Mohd Azali100% (1)
- Mcqs On Control SystemDokument59 SeitenMcqs On Control SystemAmeen UllahNoch keine Bewertungen
- Fundamentals of Mechatronics Short CourseDokument3 SeitenFundamentals of Mechatronics Short CourseAamir Hasan KhanNoch keine Bewertungen
- MCQDokument7 SeitenMCQ19himaniNoch keine Bewertungen
- Digital Signal Processing (DSP)Dokument0 SeitenDigital Signal Processing (DSP)www.bhawesh.com.npNoch keine Bewertungen
- CS Ut 2 MCQDokument3 SeitenCS Ut 2 MCQedwinNoch keine Bewertungen
- Control Systems KuestionDokument39 SeitenControl Systems KuestionRose KayoNoch keine Bewertungen
- Electromagnetic Waves and Transmission LinesDokument180 SeitenElectromagnetic Waves and Transmission LinesGurusreenuNoch keine Bewertungen
- Course File - WSNDokument20 SeitenCourse File - WSNajaychhotu100% (1)
- Signals and Systems: BooksDokument1 SeiteSignals and Systems: Booksfaizan bariNoch keine Bewertungen
- Ee3304 hw1 SLNDokument11 SeitenEe3304 hw1 SLNzerocoderNoch keine Bewertungen
- Ece VI Digital Communication 10ec61 NotesDokument252 SeitenEce VI Digital Communication 10ec61 NotesNiharika Korukonda100% (1)
- X-Y Recorder - The Web's Where You Study In!Dokument3 SeitenX-Y Recorder - The Web's Where You Study In!Srihari KilaruNoch keine Bewertungen
- 1 Laplace Transforms - NotesDokument16 Seiten1 Laplace Transforms - NotesSboNoch keine Bewertungen
- Control System MCQDokument4 SeitenControl System MCQPriyankNoch keine Bewertungen
- Elect Machine Total 2012Dokument22 SeitenElect Machine Total 2012NGOUNENoch keine Bewertungen
- 03 01 Laplace Transforms Slides HandoutDokument57 Seiten03 01 Laplace Transforms Slides HandoutXavimVXS100% (2)
- GATE-1999 One Mark Questions: Institute of Engineering Studies (IES, Bangalore) Analog Electronics Old GATE ECEDokument74 SeitenGATE-1999 One Mark Questions: Institute of Engineering Studies (IES, Bangalore) Analog Electronics Old GATE ECEPrateek Khare100% (2)
- EC6502-Principal of Digital Signal Processing - 2013 - Regulation PDFDokument13 SeitenEC6502-Principal of Digital Signal Processing - 2013 - Regulation PDFSuba Sara SubaNoch keine Bewertungen
- Unit 3Dokument58 SeitenUnit 3Dhamodharan SrinivasanNoch keine Bewertungen
- Ordinary Differential Equations: 1971 NRL—MRC ConferenceVon EverandOrdinary Differential Equations: 1971 NRL—MRC ConferenceLeonard WeissNoch keine Bewertungen
- Mathematical Theory of Connecting Networks and Telephone TrafficVon EverandMathematical Theory of Connecting Networks and Telephone TrafficNoch keine Bewertungen
- A Collection of Problems on Mathematical Physics: International Series of Monographs in Pure and Applied MathematicsVon EverandA Collection of Problems on Mathematical Physics: International Series of Monographs in Pure and Applied MathematicsNoch keine Bewertungen
- Digital Signal Processing Systems: Implementation Techniques: Advances in Theory and ApplicationsVon EverandDigital Signal Processing Systems: Implementation Techniques: Advances in Theory and ApplicationsNoch keine Bewertungen
- Light Worksheet LessonplanDokument2 SeitenLight Worksheet LessonplanreporterrajiniNoch keine Bewertungen
- Light Worksheet LessonplanDokument2 SeitenLight Worksheet LessonplanreporterrajiniNoch keine Bewertungen
- Exp 2Dokument6 SeitenExp 2reporterrajiniNoch keine Bewertungen
- Pressure and DepthDokument28 SeitenPressure and DepthreporterrajiniNoch keine Bewertungen
- Sound Grade8 Lesson 1Dokument22 SeitenSound Grade8 Lesson 1reporterrajiniNoch keine Bewertungen
- Magnetism Worksheet Lp2Dokument1 SeiteMagnetism Worksheet Lp2reporterrajiniNoch keine Bewertungen
- Electricity Revision BookletDokument4 SeitenElectricity Revision BookletAsif Zubayer PalakNoch keine Bewertungen
- MODEL-dlc Eeee RmkcetDokument2 SeitenMODEL-dlc Eeee RmkcetreporterrajiniNoch keine Bewertungen
- Ans Key Ec6405Dokument5 SeitenAns Key Ec6405reporterrajiniNoch keine Bewertungen
- CklistDokument2 SeitenCklistreporterrajiniNoch keine Bewertungen
- Using Block Diagram Reduction Technique Finds The Transfer Function For The System Shown in Fig 4Dokument3 SeitenUsing Block Diagram Reduction Technique Finds The Transfer Function For The System Shown in Fig 4reporterrajiniNoch keine Bewertungen
- Bode Plot RulesDokument5 SeitenBode Plot RulesreporterrajiniNoch keine Bewertungen
- Advances in DCS SystemsDokument2 SeitenAdvances in DCS SystemsreporterrajiniNoch keine Bewertungen
- Moedel EC2255 Cs QPDokument4 SeitenMoedel EC2255 Cs QPreporterrajiniNoch keine Bewertungen
- GRT 1-nwDokument4 SeitenGRT 1-nwreporterrajiniNoch keine Bewertungen
- MoletronicsDokument25 SeitenMoletronicsreporterrajiniNoch keine Bewertungen
- EC6405 CS Question Bank FULLDokument84 SeitenEC6405 CS Question Bank FULLreporterrajiniNoch keine Bewertungen
- Presentation 1 LicDokument28 SeitenPresentation 1 LicreporterrajiniNoch keine Bewertungen
- Control Syst Test IDokument4 SeitenControl Syst Test IreporterrajiniNoch keine Bewertungen
- DST SeminarDokument5 SeitenDST SeminarSandip MoreNoch keine Bewertungen
- Digital TechniquesDokument52 SeitenDigital TechniquesAbdur Rafay MohyuddinNoch keine Bewertungen
- Lecture Plan - Digital ElectronicsDokument5 SeitenLecture Plan - Digital ElectronicsreporterrajiniNoch keine Bewertungen
- QBank DPSD cs2202Dokument6 SeitenQBank DPSD cs2202kunarajNoch keine Bewertungen
- Appl Form WomenDokument1 SeiteAppl Form WomenShwetang AgarwalNoch keine Bewertungen
- Preparing A Paper To Deliver at A ConferenceDokument3 SeitenPreparing A Paper To Deliver at A ConferencereporterrajiniNoch keine Bewertungen
- Experiment 7. Wave PropagationDokument9 SeitenExperiment 7. Wave PropagationAlex TrinhNoch keine Bewertungen
- Data Encoding & TransmissionDokument37 SeitenData Encoding & Transmissionheaven letaNoch keine Bewertungen
- Introduction To Cellular Mobile Radio SystemsDokument83 SeitenIntroduction To Cellular Mobile Radio SystemsBhavana GayatriNoch keine Bewertungen
- Digital Subscriber Line - DSL: Modem TechnologyDokument29 SeitenDigital Subscriber Line - DSL: Modem TechnologyKiran AmbekarNoch keine Bewertungen
- Chapter 6. Sampling and Pulse Modulation: Husheng Li The University of TennesseeDokument19 SeitenChapter 6. Sampling and Pulse Modulation: Husheng Li The University of TennesseeSampath KumarNoch keine Bewertungen
- TEF668X: 1. General DescriptionDokument8 SeitenTEF668X: 1. General DescriptionkalanghoNoch keine Bewertungen
- Functional Description: FPFCDokument2 SeitenFunctional Description: FPFCnazila100% (1)
- NSM Ds Web PDFDokument12 SeitenNSM Ds Web PDFcelNoch keine Bewertungen
- An Overview of FMCW Systems in MATLAB: ArticleDokument8 SeitenAn Overview of FMCW Systems in MATLAB: ArticleSummer KoNoch keine Bewertungen
- CommLab PWM PDFDokument2 SeitenCommLab PWM PDFDiki NugrahaNoch keine Bewertungen
- DigiMax 96k (OM)Dokument22 SeitenDigiMax 96k (OM)Carlos SantamaríaNoch keine Bewertungen
- EPONDokument41 SeitenEPONMohammad MahfouzNoch keine Bewertungen
- Introduction To Li FiDokument2 SeitenIntroduction To Li FiJaydeepNoch keine Bewertungen
- Three-Channel Guitar Amplifier With DSP and Channel TrackingDokument12 SeitenThree-Channel Guitar Amplifier With DSP and Channel TrackingLuis Matta RiosNoch keine Bewertungen
- Huawei ELTE Access Products - DBS3900 Datasheet (HD)Dokument2 SeitenHuawei ELTE Access Products - DBS3900 Datasheet (HD)QuânSoNoch keine Bewertungen
- ADVISOR II™ POCSAG Alpha-Numeric PagerDokument2 SeitenADVISOR II™ POCSAG Alpha-Numeric Pagerruizinho 1Noch keine Bewertungen
- Experiment No. 2 Discretization of Signals: Quantization and EncodingDokument2 SeitenExperiment No. 2 Discretization of Signals: Quantization and EncodingManuGearNoch keine Bewertungen
- Fractal AntennaDokument5 SeitenFractal AntennaAlagiri IndiaNoch keine Bewertungen
- (1972 Michael Gerzon) Synthetic ReverberationDokument5 Seiten(1972 Michael Gerzon) Synthetic ReverberationLuca Capozzi0% (1)
- Condor Cab SimDokument6 SeitenCondor Cab SimWallas MouraNoch keine Bewertungen
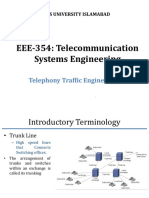
- EEE-354: Telecommunication Systems EngineeringDokument35 SeitenEEE-354: Telecommunication Systems EngineeringBilal HabibNoch keine Bewertungen
- Fortuna Slim GPSDokument2 SeitenFortuna Slim GPSElizabeth AllenNoch keine Bewertungen
- Multiplexing and DemultiplexingDokument10 SeitenMultiplexing and DemultiplexingCharming buddyNoch keine Bewertungen
- Elvis and Bode PlotsDokument7 SeitenElvis and Bode PlotsKashif AmjadNoch keine Bewertungen
- PX10 / PX8 / PX5 / PX3: Power AmplifierDokument2 SeitenPX10 / PX8 / PX5 / PX3: Power AmplifierRajuNoch keine Bewertungen
- Midcom 671-8422 Transformer 600 OhmDokument1 SeiteMidcom 671-8422 Transformer 600 OhmBenjamin DoverNoch keine Bewertungen
- Orc Volcano Urban Umts CalibrationDokument93 SeitenOrc Volcano Urban Umts CalibrationVincent MassogueNoch keine Bewertungen