Das könnte Ihnen auch gefallen
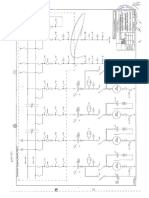
- Diagrama Unifilar GISDokument1 SeiteDiagrama Unifilar GISproteccionesNoch keine Bewertungen
- Comment Control Sheet V SIE EL001 COMMON 049 - DDokument2 SeitenComment Control Sheet V SIE EL001 COMMON 049 - DproteccionesNoch keine Bewertungen
- Standard Torque Values - Metric SystemDokument1 SeiteStandard Torque Values - Metric SystemproteccionesNoch keine Bewertungen
- SasDokument8 SeitenSasproteccionesNoch keine Bewertungen
- Comment Control Sheet V SIE EL001 COMMON 074 - CDokument3 SeitenComment Control Sheet V SIE EL001 COMMON 074 - CproteccionesNoch keine Bewertungen
- V Sie El001 Common 074 e - 3Dokument21 SeitenV Sie El001 Common 074 e - 3proteccionesNoch keine Bewertungen
- RPLC Signal ListDokument12 SeitenRPLC Signal ListproteccionesNoch keine Bewertungen
- V Sie El001 Common 074 DDokument23 SeitenV Sie El001 Common 074 DproteccionesNoch keine Bewertungen
- V Sie El001 Common 074 CDokument23 SeitenV Sie El001 Common 074 CproteccionesNoch keine Bewertungen
- OT Closing Command-RojoDokument3 SeitenOT Closing Command-RojoproteccionesNoch keine Bewertungen
- V Sie El001 Common 074 eDokument23 SeitenV Sie El001 Common 074 eproteccionesNoch keine Bewertungen
- BSCF232F04.8Insulation Test Low VoltageDokument1 SeiteBSCF232F04.8Insulation Test Low VoltageproteccionesNoch keine Bewertungen
- Signal List: RPLC ProjectDokument21 SeitenSignal List: RPLC ProjectproteccionesNoch keine Bewertungen
- RPLC PROJECT SIGNAL LISTDokument1 SeiteRPLC PROJECT SIGNAL LISTproteccionesNoch keine Bewertungen
- OT Closing Command-VerdeDokument4 SeitenOT Closing Command-VerdeproteccionesNoch keine Bewertungen
- Comment Control Sheet V SIE EL001 COMMON 047 - CDokument4 SeitenComment Control Sheet V SIE EL001 COMMON 047 - CproteccionesNoch keine Bewertungen
- Tech - Spec.33-11 KV 3 C & 1 C XLPE Cable.-Updated Aug'08Dokument12 SeitenTech - Spec.33-11 KV 3 C & 1 C XLPE Cable.-Updated Aug'08Abhishek RoyNoch keine Bewertungen
- Comment Control Sheet V SIE EL001 COMMON 048 - DDokument2 SeitenComment Control Sheet V SIE EL001 COMMON 048 - DproteccionesNoch keine Bewertungen
- Section 16126 - 201407071322102527Dokument6 SeitenSection 16126 - 201407071322102527proteccionesNoch keine Bewertungen
- Tech - Spec.33-11 KV 3 C & 1 C XLPE Cable.-Updated Aug'08Dokument12 SeitenTech - Spec.33-11 KV 3 C & 1 C XLPE Cable.-Updated Aug'08Abhishek RoyNoch keine Bewertungen
- Line impedance and fault analysisDokument6 SeitenLine impedance and fault analysisproteccionesNoch keine Bewertungen
- Switchgear Test - 8MF, 8MHDokument1 SeiteSwitchgear Test - 8MF, 8MHproteccionesNoch keine Bewertungen
- Tech - Spec.33-11 KV 3 C & 1 C XLPE Cable.-Updated Aug'08Dokument12 SeitenTech - Spec.33-11 KV 3 C & 1 C XLPE Cable.-Updated Aug'08Abhishek RoyNoch keine Bewertungen
- NEW ICEA AND AEIC STANDARDS FOR MEDIUM-VOLTAGE CABLESDokument28 SeitenNEW ICEA AND AEIC STANDARDS FOR MEDIUM-VOLTAGE CABLESgaburr100% (1)
- 2-EPR PVC 15kV 133Dokument1 Seite2-EPR PVC 15kV 133proteccionesNoch keine Bewertungen
- NEW ICEA AND AEIC STANDARDS FOR MEDIUM-VOLTAGE CABLESDokument28 SeitenNEW ICEA AND AEIC STANDARDS FOR MEDIUM-VOLTAGE CABLESgaburr100% (1)
- 2 +33+kv+three+coreDokument4 Seiten2 +33+kv+three+coreproteccionesNoch keine Bewertungen
- Creation of A New Working Group (WG)Dokument1 SeiteCreation of A New Working Group (WG)proteccionesNoch keine Bewertungen
- Sptts 2.5 - CablesDokument18 SeitenSptts 2.5 - CablesproteccionesNoch keine Bewertungen
- T HR El 16003 SPDokument27 SeitenT HR El 16003 SPproteccionesNoch keine Bewertungen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (587)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2219)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (265)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (119)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Be3000 Manual 2016Dokument77 SeitenBe3000 Manual 2016Itzel JuárezNoch keine Bewertungen
- VLSI Physical Design: From Graph Partitioning To Timing ClosureDokument30 SeitenVLSI Physical Design: From Graph Partitioning To Timing Closurenagabhairu anushaNoch keine Bewertungen
- CHM 127 Exp 1Dokument4 SeitenCHM 127 Exp 1shelby hartwigNoch keine Bewertungen
- Stylistic and DiscourseDokument4 SeitenStylistic and Discourseeunhye carisNoch keine Bewertungen
- CorentineDokument559 SeitenCorentinejames b willardNoch keine Bewertungen
- Proejcr ManduaDokument552 SeitenProejcr ManduaDanny NguyenNoch keine Bewertungen
- Unit 3.1 - Hydrostatic ForcesDokument29 SeitenUnit 3.1 - Hydrostatic ForcesIshmael MvunyiswaNoch keine Bewertungen
- SOP Questionnaire GREDokument4 SeitenSOP Questionnaire GREYuvraj GuptaNoch keine Bewertungen
- Astm A105, A105mDokument5 SeitenAstm A105, A105mMike Dukas0% (1)
- Proposed - TIA - 1392 - NFPA - 221Dokument2 SeitenProposed - TIA - 1392 - NFPA - 221Junior TorrejónNoch keine Bewertungen
- CalculationDokument24 SeitenCalculationhablet1100% (1)
- Prelims in NSTPDokument2 SeitenPrelims in NSTPJanine Alexis TividadNoch keine Bewertungen
- Best Mesl StudoDokument15 SeitenBest Mesl StudoJoenielNoch keine Bewertungen
- Hackathon Statements V1Dokument10 SeitenHackathon Statements V1AayushNoch keine Bewertungen
- Empowerment Technology - Week 2Dokument3 SeitenEmpowerment Technology - Week 2yahgieNoch keine Bewertungen
- TSR Cyl Tilt Cab LD 110Dokument2 SeitenTSR Cyl Tilt Cab LD 110Ferry AndisNoch keine Bewertungen
- Tailwind OperationsDokument3 SeitenTailwind Operationsiceman737Noch keine Bewertungen
- Click To Edit Master Title Style: Uggas, Heinz Gerhard A. Sabroso, Dionisio Jr. L. Reyes, Jeboy ODokument21 SeitenClick To Edit Master Title Style: Uggas, Heinz Gerhard A. Sabroso, Dionisio Jr. L. Reyes, Jeboy ODionisio SabrosoNoch keine Bewertungen
- MST 2 ReviewerDokument4 SeitenMST 2 ReviewerAizha NarioNoch keine Bewertungen
- CH 11 & CH 12 John R. Schermerhorn - Management-Wiley (2020)Dokument16 SeitenCH 11 & CH 12 John R. Schermerhorn - Management-Wiley (2020)Muhammad Fariz IbrahimNoch keine Bewertungen
- Manager - PPIC Role DescriptionDokument2 SeitenManager - PPIC Role DescriptionAmit TamhankarNoch keine Bewertungen
- Lab Report 1Dokument8 SeitenLab Report 1Hammad SattiNoch keine Bewertungen
- Stage TwoDokument34 SeitenStage TwoThar LattNoch keine Bewertungen
- Events of National Importance 2016Dokument345 SeitenEvents of National Importance 2016TapasKumarDashNoch keine Bewertungen
- Dewatering Well PointsDokument4 SeitenDewatering Well Pointssalloum3Noch keine Bewertungen
- Mil B 49430BDokument36 SeitenMil B 49430Bparam.vennelaNoch keine Bewertungen
- It 7sem Unit Ii IotDokument10 SeitenIt 7sem Unit Ii IotMaitrayee SuleNoch keine Bewertungen
- Cygnus 4plus Operating ManualDokument141 SeitenCygnus 4plus Operating Manualdzul effendiNoch keine Bewertungen
- Board of Intermediate & Secondary Education, Lahore: Tahir Hussain JafriDokument2 SeitenBoard of Intermediate & Secondary Education, Lahore: Tahir Hussain Jafridr_azharhayatNoch keine Bewertungen
- Amber ToolsDokument309 SeitenAmber ToolshkmydreamsNoch keine Bewertungen