Das könnte Ihnen auch gefallen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5795)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Solution Manual For Principles of Measurement Systems by John P BentleyDokument2 SeitenSolution Manual For Principles of Measurement Systems by John P BentleySrikanth Revelly60% (15)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- TIBCO BW Performance Best PracticesDokument48 SeitenTIBCO BW Performance Best PracticesSrinivasKannanNoch keine Bewertungen
- Intro To Teradata SQLDokument218 SeitenIntro To Teradata SQLdani_sagNoch keine Bewertungen
- Chapter 1 - The Cold, Hard Teradata Facts - Teradata Database Administration - Teradata Internals PDFDokument46 SeitenChapter 1 - The Cold, Hard Teradata Facts - Teradata Database Administration - Teradata Internals PDFdani_sagNoch keine Bewertungen
- R & Data Science Professional CourseDokument5 SeitenR & Data Science Professional Coursedani_sagNoch keine Bewertungen
- Topic Modelling: A Survey of Topic Models: Abstract-In Recent Years We Have Significant IncreaseDokument12 SeitenTopic Modelling: A Survey of Topic Models: Abstract-In Recent Years We Have Significant Increasedani_sagNoch keine Bewertungen
- ERP OverviewDokument29 SeitenERP OverviewLupsoiuCosmin100% (1)
- Sca-Library Acquisition ProgramDokument9 SeitenSca-Library Acquisition ProgramCindy Basilio PinedaNoch keine Bewertungen
- WebVIewer BrochureDokument2 SeitenWebVIewer BrochureCarlos GómezNoch keine Bewertungen
- Model Based System Identification For Hydraulic Deep Drawing PressesDokument11 SeitenModel Based System Identification For Hydraulic Deep Drawing PressesjordanNoch keine Bewertungen
- Corporate Entrepreneurship - HowDokument30 SeitenCorporate Entrepreneurship - HowHoang Anh TuanNoch keine Bewertungen
- SystemDesk - EB Tresos Studio Workflow DescriptionsDokument23 SeitenSystemDesk - EB Tresos Studio Workflow DescriptionsAmalkumar V GNoch keine Bewertungen
- Datasheet LIGO SP Series Fuel Level SensorDokument24 SeitenDatasheet LIGO SP Series Fuel Level SensorPACKWOODS COMPANYNoch keine Bewertungen
- Learning ObjectivesDokument2 SeitenLearning ObjectivesRezky RoeviansyahNoch keine Bewertungen
- SQL CCDokument457 SeitenSQL CCManish SinghNoch keine Bewertungen
- Virtual Classroom NetiquetteDokument10 SeitenVirtual Classroom NetiquetteZylil Quila Ymir RuizNoch keine Bewertungen
- R320 Service ManualDokument113 SeitenR320 Service ManualRichard SungaNoch keine Bewertungen
- CN RecordDokument60 SeitenCN RecordAhmed JabriNoch keine Bewertungen
- Assignment 2dbmsDokument13 SeitenAssignment 2dbmsTXACORPNoch keine Bewertungen
- Color Palettes For Graphic DesignDokument19 SeitenColor Palettes For Graphic DesignClarence Tuazon FloresNoch keine Bewertungen
- 450 857 07 C44CL Memcom Otis REM6 Wiring Loom V02 MLDokument8 Seiten450 857 07 C44CL Memcom Otis REM6 Wiring Loom V02 MLsam11Noch keine Bewertungen
- Skype For Business Server 2015 - Kickoff PresentationDokument15 SeitenSkype For Business Server 2015 - Kickoff PresentationItw UttNoch keine Bewertungen
- Topic Numarical Lasd ADokument4 SeitenTopic Numarical Lasd AMR.MUSAAB ALMAIDANNoch keine Bewertungen
- Zwave Compatibility ListDokument2 SeitenZwave Compatibility ListsupermanNoch keine Bewertungen
- Manual ETANK2000Dokument73 SeitenManual ETANK2000Ever BriceñoNoch keine Bewertungen
- Schneider Electric Price List Feb 2020 V2Dokument478 SeitenSchneider Electric Price List Feb 2020 V2Amr SohilNoch keine Bewertungen
- Cobol Programming ManualDokument58 SeitenCobol Programming Manualalex_osNoch keine Bewertungen
- Operation & Maintenance ManualDokument3 SeitenOperation & Maintenance ManualAhmed TitawiNoch keine Bewertungen
- Wagner WM-4 Loader Installation and Operation InstructionsDokument0 SeitenWagner WM-4 Loader Installation and Operation Instructionslulu3232Noch keine Bewertungen
- U03-Exception HandlingDokument22 SeitenU03-Exception Handlingdhyan114Noch keine Bewertungen
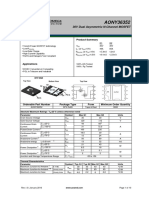
- AONY36352: 30V Dual Asymmetric N-Channel MOSFETDokument10 SeitenAONY36352: 30V Dual Asymmetric N-Channel MOSFETrobertjavi1983Noch keine Bewertungen
- SVERKER 750/780: Relay Test SetsDokument8 SeitenSVERKER 750/780: Relay Test SetshaydarNoch keine Bewertungen
- Result MBTDokument40 SeitenResult MBTAnkush R KrishnaNoch keine Bewertungen