Das könnte Ihnen auch gefallen
- Power Systems Modelling and Fault Analysis..Theory and Practice-Nasser TleisDokument10 SeitenPower Systems Modelling and Fault Analysis..Theory and Practice-Nasser TleisPaul Andres AucapiñaNoch keine Bewertungen
- Impacts of Photovoltaics On Low Voltage NetworksDokument4 SeitenImpacts of Photovoltaics On Low Voltage NetworksPaul Andres AucapiñaNoch keine Bewertungen
- Impact of DG With Storage Systems PDFDokument10 SeitenImpact of DG With Storage Systems PDFPaul Andres AucapiñaNoch keine Bewertungen
- 07462292Dokument11 Seiten07462292Paul Andres AucapiñaNoch keine Bewertungen
- Manual Simulador Power WordDokument987 SeitenManual Simulador Power WordNelson ArriagadaNoch keine Bewertungen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (120)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Tesla Coils Polycontrast Interference Photography (Goran Marjanovic)Dokument3 SeitenTesla Coils Polycontrast Interference Photography (Goran Marjanovic)THE NIKOLA TESLA INSTITUTE100% (2)
- D Series Datasheet PDFDokument32 SeitenD Series Datasheet PDFryreddyNoch keine Bewertungen
- Control de Nivel Mcdonnell Miller 259Dokument12 SeitenControl de Nivel Mcdonnell Miller 259Appleuk SudarNoch keine Bewertungen
- IE2 IE3 MotorsDokument11 SeitenIE2 IE3 Motorsmaulik1611Noch keine Bewertungen
- Et200sp Ai Energymeter 400vac ST Manual en-US en-USDokument97 SeitenEt200sp Ai Energymeter 400vac ST Manual en-US en-USHélio Dos SantosNoch keine Bewertungen
- Temperature Controller PDFDokument3 SeitenTemperature Controller PDFAhtesham KhanNoch keine Bewertungen
- Z 0409 MFDokument6 SeitenZ 0409 MFYadira RodriguezNoch keine Bewertungen
- 3RW40566BB44 Datasheet enDokument5 Seiten3RW40566BB44 Datasheet enfararNoch keine Bewertungen
- ABB Electrical Installation Handbook 6th Edition2010Dokument548 SeitenABB Electrical Installation Handbook 6th Edition2010paratonerq100% (1)
- Appendix PDFDokument33 SeitenAppendix PDFDevi PermataNoch keine Bewertungen
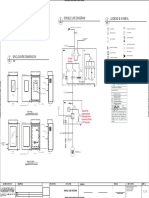
- Single Line Diagram 3 General Notes & Specification 1 Legend & Symbol 4Dokument1 SeiteSingle Line Diagram 3 General Notes & Specification 1 Legend & Symbol 4Abnar KumplishaNoch keine Bewertungen
- Design of Novel Wideband Circularly Polarized Antenna Based On Vivaldi Antenna StructureDokument4 SeitenDesign of Novel Wideband Circularly Polarized Antenna Based On Vivaldi Antenna StructureDr-Gurpreet KumarNoch keine Bewertungen
- Wa0008.Dokument3 SeitenWa0008.info.sanjudcontractorsltdNoch keine Bewertungen
- Sensorless Sliding Mode Control of Induction Motor Drives: AbstractDokument6 SeitenSensorless Sliding Mode Control of Induction Motor Drives: AbstractSumithra BalakrishnanNoch keine Bewertungen
- Novus XT Series: Outdoor UPS SystemDokument2 SeitenNovus XT Series: Outdoor UPS Systemsebax123Noch keine Bewertungen
- K TFB en 05 12 PDFDokument9 SeitenK TFB en 05 12 PDFvictorNoch keine Bewertungen
- Cip 0722Dokument2 SeitenCip 0722luisNoch keine Bewertungen
- Dokumen - Tips - Zxdu68 t601 v41r03m01 DC Power System Product Description PDFDokument36 SeitenDokumen - Tips - Zxdu68 t601 v41r03m01 DC Power System Product Description PDFTaha UsmaniNoch keine Bewertungen
- Handbook For Sound Engineers PDF - 8993935 PDFDokument7 SeitenHandbook For Sound Engineers PDF - 8993935 PDFJooNoch keine Bewertungen
- 99 IC Projects 1980Dokument116 Seiten99 IC Projects 1980Pedralhada100% (19)
- drv8662 DatasheetDokument19 Seitendrv8662 DatasheetshibasholmarcNoch keine Bewertungen
- The Science of Photobiology - 2nd EdDokument428 SeitenThe Science of Photobiology - 2nd EdFede ZannierNoch keine Bewertungen
- TLZJ23022844586Dokument13 SeitenTLZJ23022844586alonsoNoch keine Bewertungen
- DC To AC Converters PDFDokument4 SeitenDC To AC Converters PDFrizwanNoch keine Bewertungen
- Ertl NorthDokument18 SeitenErtl NorthSharath KarnatiNoch keine Bewertungen
- EE592 Lab Manual Power Sytem LabDokument48 SeitenEE592 Lab Manual Power Sytem LabCiczmockingbird TsvkAdmNoch keine Bewertungen
- Pre LABbDokument5 SeitenPre LABbRʌʜɘɘɭ AŋsʌʀɩNoch keine Bewertungen
- Working Principle of Solar CellDokument24 SeitenWorking Principle of Solar CellVera KumarNoch keine Bewertungen
- Installation of 6kWp Grid Tie Rooftop Solar SystemDokument3 SeitenInstallation of 6kWp Grid Tie Rooftop Solar SystemcunconNoch keine Bewertungen
- Healthstream Regulatory Script: Electrical SafetyDokument47 SeitenHealthstream Regulatory Script: Electrical SafetyzahirNoch keine Bewertungen