Das könnte Ihnen auch gefallen
- Logic Objectives ExamDokument5 SeitenLogic Objectives ExamPeejay OllabracNoch keine Bewertungen
- Microcontroller Interview Questions and Answers PDFDokument8 SeitenMicrocontroller Interview Questions and Answers PDFbalaji_446913478Noch keine Bewertungen
- Hardware Description Language Demystified: Explore Digital System Design Using Verilog HDL and VLSI Design ToolsVon EverandHardware Description Language Demystified: Explore Digital System Design Using Verilog HDL and VLSI Design ToolsNoch keine Bewertungen
- Seminar Report On Google Smart Contact LensDokument30 SeitenSeminar Report On Google Smart Contact LensAzImm70% (10)
- j12 PDFDokument778 Seitenj12 PDFOliveira eletricidade100% (2)
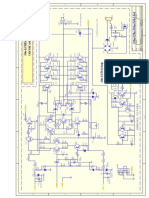
- Biema J16a J26a J36a J46a SCHDokument4 SeitenBiema J16a J26a J36a J46a SCHEmz Taperla100% (2)
- Kenwood KAC 7252 Service ManualDokument16 SeitenKenwood KAC 7252 Service Manualanon_8488607990% (2)
- Digital Principle and System DesignDokument26 SeitenDigital Principle and System Designainugiri100% (4)
- Digital Logic MinutesDokument36 SeitenDigital Logic MinutesshyamalaperiNoch keine Bewertungen
- Number Systems and Boolean LogicDokument9 SeitenNumber Systems and Boolean Logicapi-260685687Noch keine Bewertungen
- Analog and Digital Electronics Lab Manual PDFDokument109 SeitenAnalog and Digital Electronics Lab Manual PDFShaun ThomasNoch keine Bewertungen
- Verilog HDL - 18ec56 AssignmentDokument2 SeitenVerilog HDL - 18ec56 Assignmentsureshfm1Noch keine Bewertungen
- R-2R Binary Ladder DACDokument27 SeitenR-2R Binary Ladder DACkaka_huzefa100% (1)
- ELECTRONIC DEVICES Viva QUESTIONSDokument2 SeitenELECTRONIC DEVICES Viva QUESTIONSRaj KumarNoch keine Bewertungen
- Digital Clock ProjectDokument20 SeitenDigital Clock ProjectMenzeli Mtunzi40% (5)
- Digital Circuits For GATE ExamDokument15 SeitenDigital Circuits For GATE ExamSAMIT KARMAKAR100% (1)
- Lessons in Digital Electronics PDFDokument158 SeitenLessons in Digital Electronics PDFDaryl ScottNoch keine Bewertungen
- 8051 Lab ManualDokument28 Seiten8051 Lab Manualsubramanyam6286% (14)
- Vtu 3RD Sem Cse Logic Design Notes 10CS33Dokument63 SeitenVtu 3RD Sem Cse Logic Design Notes 10CS33EKTHATIGER633590100% (3)
- IoT WORKSHOPDokument38 SeitenIoT WORKSHOPumeshNoch keine Bewertungen
- Network Analysis: Sharique Najam MuzaffarDokument32 SeitenNetwork Analysis: Sharique Najam Muzaffarmanzur_a_m100% (1)
- Lecture Notes: Digital Logic DesignDokument66 SeitenLecture Notes: Digital Logic DesignJyoti GroverNoch keine Bewertungen
- VerilogDokument194 SeitenVerilogGagan KandraNoch keine Bewertungen
- BEEE 2marks (With Ans)Dokument25 SeitenBEEE 2marks (With Ans)Nanda SubramanianNoch keine Bewertungen
- 4 Bit BCD AdderDokument7 Seiten4 Bit BCD AdderJagnur SinghNoch keine Bewertungen
- Unisa Digital Logic NotesDokument8 SeitenUnisa Digital Logic NotesmmasalekNoch keine Bewertungen
- Lap Manual Pspice PDFDokument17 SeitenLap Manual Pspice PDFred_heartedNoch keine Bewertungen
- Cmos Digital Circuits - BookDokument56 SeitenCmos Digital Circuits - BookHelder Nascimento100% (1)
- Signal and System Book by Nagoor Kani - Google SearchDokument2 SeitenSignal and System Book by Nagoor Kani - Google SearchHimanshu Kumar SagarNoch keine Bewertungen
- Practical: 3 Aim: Implement Common Bus System of Four 4-Bit Register Using 2x4 Decoder and Three State BufferDokument2 SeitenPractical: 3 Aim: Implement Common Bus System of Four 4-Bit Register Using 2x4 Decoder and Three State BufferMahesh Pillai100% (2)
- Digital Electronics Two Marks Question & AnswerDokument5 SeitenDigital Electronics Two Marks Question & Answersaipradeepkp100% (10)
- Sequential Logic BasicsDokument20 SeitenSequential Logic Basicskhairalla mohamedNoch keine Bewertungen
- EdSim51 - Notes On The 8051Dokument16 SeitenEdSim51 - Notes On The 8051Pawan KaswanNoch keine Bewertungen
- Logic Gate and CircuitDokument16 SeitenLogic Gate and CircuitMd Naimur Rahaman SakibNoch keine Bewertungen
- Morris Mano ch01Dokument25 SeitenMorris Mano ch01Praveen DhawanNoch keine Bewertungen
- Chapter 12 - ADC TestingDokument87 SeitenChapter 12 - ADC TestingMonal Bhoyar100% (1)
- Digital Principles SwitchingDokument545 SeitenDigital Principles SwitchingHarshaNoch keine Bewertungen
- Verilog - ManoDokument43 SeitenVerilog - ManoMohammod Ahad ArianNoch keine Bewertungen
- Ec2207 - Digital Electronics Lab ManualDokument83 SeitenEc2207 - Digital Electronics Lab ManualasrafalisNoch keine Bewertungen
- Sri Balaji Chockalingam Engineering College, Arni Department of Electronics and Communication Engineering Model Exam Ec8004 - Wireless NetworksDokument2 SeitenSri Balaji Chockalingam Engineering College, Arni Department of Electronics and Communication Engineering Model Exam Ec8004 - Wireless NetworksBoopathi Sambandha MoorthiNoch keine Bewertungen
- RC OscillatorDokument8 SeitenRC OscillatorRavi TejaNoch keine Bewertungen
- STLD Lab Manual r20 RegulationDokument42 SeitenSTLD Lab Manual r20 RegulationsaikiranNoch keine Bewertungen
- Fundamentals of Electronics 2: Continuous-time Signals and SystemsVon EverandFundamentals of Electronics 2: Continuous-time Signals and SystemsNoch keine Bewertungen
- Lecture Notes For Digital ElectronicsDokument43 SeitenLecture Notes For Digital ElectronicsPrafull BNoch keine Bewertungen
- Anna University EC2203-Digital Electronics Lecture NotesDokument43 SeitenAnna University EC2203-Digital Electronics Lecture Noteskenny kannaNoch keine Bewertungen
- Digital NotesDokument43 SeitenDigital NotesSonuNoch keine Bewertungen
- Digital Electronics Notes PDFDokument43 SeitenDigital Electronics Notes PDFneelam sanjeev kumar0% (1)
- Lecture Notes For Digital ElectronicsDokument43 SeitenLecture Notes For Digital ElectronicsShruti GuptaNoch keine Bewertungen
- Digital Computers & Digital SystemsDokument11 SeitenDigital Computers & Digital Systemsso0lidNoch keine Bewertungen
- Lecture Notes For Digital ElectronicsDokument43 SeitenLecture Notes For Digital ElectronicsPV RKNoch keine Bewertungen
- Lecture #6 - Boolean Algebra (5 Files Merged)Dokument91 SeitenLecture #6 - Boolean Algebra (5 Files Merged)Ahmadnur JulNoch keine Bewertungen
- ThesisDokument11 SeitenThesistotktoNoch keine Bewertungen
- 2.boolean LogicDokument17 Seiten2.boolean Logicbhuvanalakshmi kNoch keine Bewertungen
- Logics Expt 2Dokument8 SeitenLogics Expt 2Amiel GuevarraNoch keine Bewertungen
- Basic Logic CircuitsDokument19 SeitenBasic Logic CircuitspereradgNoch keine Bewertungen
- DPSD Unit 1Dokument48 SeitenDPSD Unit 1Dharma Raj KavithaNoch keine Bewertungen
- Logic PDFDokument24 SeitenLogic PDFcorazonpuroNoch keine Bewertungen
- Mod 1 2Dokument20 SeitenMod 1 2Naseef RahmanNoch keine Bewertungen
- Coa CH 01Dokument16 SeitenCoa CH 01api-208618088Noch keine Bewertungen
- Regent University College of Sci & Tech Mr. David Fiase Department of EngineeringDokument35 SeitenRegent University College of Sci & Tech Mr. David Fiase Department of EngineeringKwameOpareNoch keine Bewertungen
- 12 Computer Science Notes CH07 Boolean AlgebraDokument12 Seiten12 Computer Science Notes CH07 Boolean AlgebraRohan KashikarNoch keine Bewertungen
- ECSE-4760 Real-Time Applications in Control & Communications Experiments in Digital Logic DesignDokument24 SeitenECSE-4760 Real-Time Applications in Control & Communications Experiments in Digital Logic DesignMitu BaralNoch keine Bewertungen
- CANDIDATE Instruction On Admit Cards: Srinagar, Kothi Bagh,,Srinagar, 190001Dokument1 SeiteCANDIDATE Instruction On Admit Cards: Srinagar, Kothi Bagh,,Srinagar, 190001AzImmNoch keine Bewertungen
- Maven AzimDokument1 SeiteMaven AzimAzImmNoch keine Bewertungen
- Channel Length Modulation in MOSFET (VLSI Design) - BuzztechDokument5 SeitenChannel Length Modulation in MOSFET (VLSI Design) - BuzztechAzImmNoch keine Bewertungen
- Certificate: Divar Parihaspora, Tehsil: - Pattan District: - Baramulla, KASHMIR - 193121Dokument1 SeiteCertificate: Divar Parihaspora, Tehsil: - Pattan District: - Baramulla, KASHMIR - 193121AzImmNoch keine Bewertungen
- Virtual KeyboardDokument12 SeitenVirtual KeyboardAzImmNoch keine Bewertungen
- Farooq Contractor AprilDokument3 SeitenFarooq Contractor AprilAzImmNoch keine Bewertungen
- Series and Parallel Operation of ThyristorsDokument4 SeitenSeries and Parallel Operation of ThyristorsAzImmNoch keine Bewertungen
- Digital Communication M-Ary EncodingDokument2 SeitenDigital Communication M-Ary EncodingAzImmNoch keine Bewertungen
- Digital Communication Line Codes PDFDokument7 SeitenDigital Communication Line Codes PDFAzImmNoch keine Bewertungen
- 1 Self Employed Tailor Amh q1947Dokument13 Seiten1 Self Employed Tailor Amh q1947AzImm100% (2)
- Digital Communication Line Codes PDFDokument7 SeitenDigital Communication Line Codes PDFAzImmNoch keine Bewertungen
- Fresh Examination Form: 154441 RegularDokument1 SeiteFresh Examination Form: 154441 RegularAzImmNoch keine Bewertungen
- Masjid Furqan DashboardDokument2 SeitenMasjid Furqan DashboardAzImmNoch keine Bewertungen
- 5 1 1 C I 1 B II 1 B III 1 A IV 1 A V: Marking Scheme CBSE Sample Question Paper Class - X Course - BDokument8 Seiten5 1 1 C I 1 B II 1 B III 1 A IV 1 A V: Marking Scheme CBSE Sample Question Paper Class - X Course - BAzImmNoch keine Bewertungen
- Masjid Committee Mohalla Furqan Jetty Khwaja Bagh Baramulla Hamaam Fund Balance Sheet For The Year - 2016-17Dokument2 SeitenMasjid Committee Mohalla Furqan Jetty Khwaja Bagh Baramulla Hamaam Fund Balance Sheet For The Year - 2016-17AzImmNoch keine Bewertungen
- CBSE Sample Question Paper Class - X Urdu Course - B: 3 80 Time Allowed: 3 Hours Max. Marks: 80Dokument10 SeitenCBSE Sample Question Paper Class - X Urdu Course - B: 3 80 Time Allowed: 3 Hours Max. Marks: 80AzImmNoch keine Bewertungen
- Masjid Committee Mohalla Furqan Jetty Khwaja Bagh Baramulla Balance Sheet For The Month Ending - YearDokument2 SeitenMasjid Committee Mohalla Furqan Jetty Khwaja Bagh Baramulla Balance Sheet For The Month Ending - YearAzImmNoch keine Bewertungen
- Background PDFDokument44 SeitenBackground PDFAzImmNoch keine Bewertungen
- Ieee Research Papers On Electrical MachinesDokument4 SeitenIeee Research Papers On Electrical Machineshnpawevkg100% (1)
- Programmable Metasurfaces: State of The Art and ProspectsDokument5 SeitenProgrammable Metasurfaces: State of The Art and ProspectsSam GreenNoch keine Bewertungen
- (Jan 2022) OWON Product Catalogue v3.4.9 - R1Dokument64 Seiten(Jan 2022) OWON Product Catalogue v3.4.9 - R1Truong HungNoch keine Bewertungen
- Chapter 3 - ThyristorsDokument39 SeitenChapter 3 - ThyristorsDale SteynNoch keine Bewertungen
- Induction Motor: by Ashvani Shukla Manager (C&I) BGR EnergyDokument15 SeitenInduction Motor: by Ashvani Shukla Manager (C&I) BGR Energywondi BETNoch keine Bewertungen
- R3-10-15K-LV EN 50549-1 RENblad CertificateDokument2 SeitenR3-10-15K-LV EN 50549-1 RENblad CertificateWaldemar Alvares RezendeNoch keine Bewertungen
- Alternator Data Sheet Allied Generator.Dokument14 SeitenAlternator Data Sheet Allied Generator.muhammad nomanNoch keine Bewertungen
- Supplier Document Cover Sheet: RNP DCU Plant ProjectDokument12 SeitenSupplier Document Cover Sheet: RNP DCU Plant ProjectSlobodan MilosavljevicNoch keine Bewertungen
- Verilog Code For Parallel in Parallel Out Shift RegisterDokument3 SeitenVerilog Code For Parallel in Parallel Out Shift Registermeaow88100% (1)
- Aiwa ZL700 - ZL800-62424 PDFDokument46 SeitenAiwa ZL700 - ZL800-62424 PDFtulios6262Noch keine Bewertungen
- National Semiconductor: PreliminaryDokument20 SeitenNational Semiconductor: PreliminarySergio Diaz PereiraNoch keine Bewertungen
- Service Manual: Mds-Ja20EsDokument84 SeitenService Manual: Mds-Ja20Esfoxmulder6161695Noch keine Bewertungen
- Belaz Traction GenerationDokument2 SeitenBelaz Traction GenerationCybergo100% (1)
- Improved Direct Back EMF Detection For Sensorless Brushless DC (BLDC) Motor DrivesDokument6 SeitenImproved Direct Back EMF Detection For Sensorless Brushless DC (BLDC) Motor DrivesBùi TuyếnNoch keine Bewertungen
- Interchange 4th Edition Class AudioDokument4 SeitenInterchange 4th Edition Class Audiowh9p6nrb9nNoch keine Bewertungen
- Smart Shopping Trolley Using RfidDokument4 SeitenSmart Shopping Trolley Using RfidVijay MathurNoch keine Bewertungen
- Verilog HDL Basics: Computer Science Dpt. University of Crete, Greece E-Mail: Poisson@Dokument68 SeitenVerilog HDL Basics: Computer Science Dpt. University of Crete, Greece E-Mail: Poisson@kushal24Noch keine Bewertungen
- Giải Bài TậpDokument22 SeitenGiải Bài TậpNHƯ HỒ LỮ QUỲNHNoch keine Bewertungen
- Catalogue - LS-Titan Position SwitchesDokument33 SeitenCatalogue - LS-Titan Position SwitchesRicardo CalmonNoch keine Bewertungen
- Ec Centrifugal Module - Radipac: K3G450-Pb35-19Dokument6 SeitenEc Centrifugal Module - Radipac: K3G450-Pb35-19fabioNoch keine Bewertungen
- Notification Devices: Optical and Accustical Remote IndicatorDokument1 SeiteNotification Devices: Optical and Accustical Remote IndicatorCarolyn Munoz0% (1)
- 1.IS Code ListDokument24 Seiten1.IS Code ListholoNoch keine Bewertungen
- MCCB HGM125Dokument5 SeitenMCCB HGM125paulNoch keine Bewertungen
- Aplus Compendium MS PDFDokument212 SeitenAplus Compendium MS PDFLhen-Vincelyn LeysonNoch keine Bewertungen
- The Book Begins With Chapter 3, Chapter 1&2 Have No Translation As A BasisDokument12 SeitenThe Book Begins With Chapter 3, Chapter 1&2 Have No Translation As A BasisIbrahim AkNoch keine Bewertungen
- Physics ProjectDokument21 SeitenPhysics ProjectKanmani SathiachandranNoch keine Bewertungen
- Electrical ExamDokument4 SeitenElectrical ExamShahida Babeesh100% (1)