Das könnte Ihnen auch gefallen
- Consecration of TalismansDokument5 SeitenConsecration of Talismansdancinggoat23100% (1)
- 2013-01-28 203445 International Fault Codes Eges350 DTCDokument8 Seiten2013-01-28 203445 International Fault Codes Eges350 DTCVeterano del CaminoNoch keine Bewertungen
- Curve Fitting With MatlabDokument38 SeitenCurve Fitting With Matlabtanushrisharma100% (1)
- Sabian Aspect OrbsDokument8 SeitenSabian Aspect Orbsellaella13100% (2)
- 12 Step Worksheet With QuestionsDokument26 Seiten12 Step Worksheet With QuestionsKristinDaigleNoch keine Bewertungen
- P3 Past Papers Model AnswersDokument211 SeitenP3 Past Papers Model AnswersEyad UsamaNoch keine Bewertungen
- Approvals Management Responsibilities and Setups in AME.B PDFDokument20 SeitenApprovals Management Responsibilities and Setups in AME.B PDFAli LoganNoch keine Bewertungen
- CAE Fatigue and Fracture Seminar - CZM For WebDokument21 SeitenCAE Fatigue and Fracture Seminar - CZM For WebdamnkaushikNoch keine Bewertungen
- CAE Fatigue and Fracture Seminar - CZM For WebDokument21 SeitenCAE Fatigue and Fracture Seminar - CZM For WebdamnkaushikNoch keine Bewertungen
- Implementation of A Beam Element in FEA Using MATLAB: (Type The Document Subtitle)Dokument12 SeitenImplementation of A Beam Element in FEA Using MATLAB: (Type The Document Subtitle)akankshag_13Noch keine Bewertungen
- Machine Learning Programming ExerciseDokument118 SeitenMachine Learning Programming Exercisexgdsmxy100% (2)
- Marathi To English Dictionary PDFDokument17 SeitenMarathi To English Dictionary PDFMohit1234zxt100% (1)
- Integer Optimization and its Computation in Emergency ManagementVon EverandInteger Optimization and its Computation in Emergency ManagementNoch keine Bewertungen
- Programming Exercise 5: Regularized Linear Regression and Bias V.S. VarianceDokument14 SeitenProgramming Exercise 5: Regularized Linear Regression and Bias V.S. VarianceleloiboiNoch keine Bewertungen
- Og RO05Dokument34 SeitenOg RO05Sofiane BessaiNoch keine Bewertungen
- A Generalized Recursive Algorithm For Binary Multiplication Based On Vedic MathematicsDokument6 SeitenA Generalized Recursive Algorithm For Binary Multiplication Based On Vedic MathematicsVikas YadavNoch keine Bewertungen
- Algorithm and ComplexityDokument42 SeitenAlgorithm and ComplexityRichyNoch keine Bewertungen
- Algorithms For Parallel MachinesDokument7 SeitenAlgorithms For Parallel Machinesshinde_jayesh2005Noch keine Bewertungen
- Position Recovery From Accelerometric SensorsDokument50 SeitenPosition Recovery From Accelerometric SensorsMarkusMayer100% (1)
- Algorithms AnalysisDokument5 SeitenAlgorithms Analysismunir ahmedNoch keine Bewertungen
- Assignment LUfactorisationDokument5 SeitenAssignment LUfactorisationwebforderNoch keine Bewertungen
- GP CT Dresde Final No87Dokument19 SeitenGP CT Dresde Final No87José RêgoNoch keine Bewertungen
- PP Introduction To MATLABDokument11 SeitenPP Introduction To MATLABAnindya Ayu NovitasariNoch keine Bewertungen
- Comp 372 Assignment 2Dokument9 SeitenComp 372 Assignment 2Hussam ShahNoch keine Bewertungen
- Sparse Implementation of Revised Simplex Algorithms On Parallel ComputersDokument8 SeitenSparse Implementation of Revised Simplex Algorithms On Parallel ComputersKaram SalehNoch keine Bewertungen
- Linear Regression: Machine LearningDokument9 SeitenLinear Regression: Machine LearningVivek ThotaNoch keine Bewertungen
- Linear EquationDokument9 SeitenLinear Equationsam_kamali85Noch keine Bewertungen
- Control Example Using MatlabDokument37 SeitenControl Example Using MatlabRizkie Denny PratamaNoch keine Bewertungen
- Linear Regression - Numpy and SklearnDokument7 SeitenLinear Regression - Numpy and SklearnArala FolaNoch keine Bewertungen
- Karthik Nambiar 60009220193Dokument9 SeitenKarthik Nambiar 60009220193knambiardjsNoch keine Bewertungen
- Lec11 ComplexityDokument52 SeitenLec11 Complexity0zogNoch keine Bewertungen
- Analysis of Algorithms, A Case Study: Determinants of Matrices With Polynomial EntriesDokument10 SeitenAnalysis of Algorithms, A Case Study: Determinants of Matrices With Polynomial EntriesNiltonJuniorNoch keine Bewertungen
- Eeg 823Dokument71 SeitenEeg 823Anonymous Th1S33Noch keine Bewertungen
- ECSE 420 - Parallel Cholesky Algorithm - ReportDokument17 SeitenECSE 420 - Parallel Cholesky Algorithm - ReportpiohmNoch keine Bewertungen
- Paper For Final SubmissionDokument6 SeitenPaper For Final SubmissionAnurag SubhakthNoch keine Bewertungen
- Ex 5Dokument14 SeitenEx 5Marko KneževićNoch keine Bewertungen
- Sec ADokument1 SeiteSec AroufixNoch keine Bewertungen
- NI Tutorial 6477 enDokument10 SeitenNI Tutorial 6477 enEngr Nayyer Nayyab MalikNoch keine Bewertungen
- (I-SEMESTER, 2014-2015) Lecturer: Harish Kumar Tutorial 1Dokument2 Seiten(I-SEMESTER, 2014-2015) Lecturer: Harish Kumar Tutorial 1Avijeet Singh JaswalNoch keine Bewertungen
- 1 Non-Linear Curve Fitting: 1.1 LinearizationDokument3 Seiten1 Non-Linear Curve Fitting: 1.1 LinearizationflgrhnNoch keine Bewertungen
- Numericke Metode U Inzenjerstvu Predavanja 2Dokument92 SeitenNumericke Metode U Inzenjerstvu Predavanja 2TonyBarosevcicNoch keine Bewertungen
- Ex 3Dokument12 SeitenEx 3iqfzfbzqfzfqNoch keine Bewertungen
- Gauss Elimination NotesDokument7 SeitenGauss Elimination Notesnavin shuklaNoch keine Bewertungen
- Ex 1Dokument15 SeitenEx 1Nathan LawlessNoch keine Bewertungen
- Introduction To MatlabmDokument56 SeitenIntroduction To MatlabmGeorji kairuNoch keine Bewertungen
- Control Design Along Trajectories With Sums of Squares ProgrammingDokument8 SeitenControl Design Along Trajectories With Sums of Squares Programmingkhushal bhanderiNoch keine Bewertungen
- Unit-III Advanced Machine LearningDokument8 SeitenUnit-III Advanced Machine LearningSuja MaryNoch keine Bewertungen
- Ex 2 SolutionDokument13 SeitenEx 2 SolutionMian AlmasNoch keine Bewertungen
- Lab 05Dokument5 SeitenLab 05MUHAMMAD ARSLANNoch keine Bewertungen
- N - Unit-1 - Design and Analysis of Algorithm - B19CS4010 - 2020-2021 - 4 - DDokument24 SeitenN - Unit-1 - Design and Analysis of Algorithm - B19CS4010 - 2020-2021 - 4 - DDarren Sherwin KennyNoch keine Bewertungen
- NuMeths (Unit1)Dokument34 SeitenNuMeths (Unit1)kathrin_jazz26Noch keine Bewertungen
- Poly RegressionDokument10 SeitenPoly Regressionharshbafna.ei20Noch keine Bewertungen
- Intelligent Simulation of Multibody Dynamics: Space-State and Descriptor Methods in Sequential and Parallel Computing EnvironmentsDokument19 SeitenIntelligent Simulation of Multibody Dynamics: Space-State and Descriptor Methods in Sequential and Parallel Computing EnvironmentsChernet TugeNoch keine Bewertungen
- Ex 3Dokument12 SeitenEx 3api-322416213Noch keine Bewertungen
- Lecture 1Dokument17 SeitenLecture 1amjadtawfeq2Noch keine Bewertungen
- 3-Polynomial Regression Using PythonDokument14 Seiten3-Polynomial Regression Using Pythonsai saravanaNoch keine Bewertungen
- International Journal of Engineering Research and Development (IJERD)Dokument6 SeitenInternational Journal of Engineering Research and Development (IJERD)IJERDNoch keine Bewertungen
- Numerical Methods Lect1Dokument21 SeitenNumerical Methods Lect1Sarbesh ChaudharyNoch keine Bewertungen
- Introduction To Digital Control SystemDokument47 SeitenIntroduction To Digital Control SystemNexusNoch keine Bewertungen
- Ex 5Dokument14 SeitenEx 5api-322416213Noch keine Bewertungen
- Automatic Reparameterisation in Probabilistic ProgrammingDokument8 SeitenAutomatic Reparameterisation in Probabilistic ProgrammingdperepolkinNoch keine Bewertungen
- Application To A Biped Walking RobotDokument6 SeitenApplication To A Biped Walking RobotAPRIL_SNOWNoch keine Bewertungen
- State Space For Control SystemsDokument21 SeitenState Space For Control SystemsZhraa NorNoch keine Bewertungen
- Numerics Lecture 1Dokument41 SeitenNumerics Lecture 1Isabela Marie MendezNoch keine Bewertungen
- Project 1 - ANN With BackpropDokument3 SeitenProject 1 - ANN With BackpropchytenNoch keine Bewertungen
- Multiple Models Approach in Automation: Takagi-Sugeno Fuzzy SystemsVon EverandMultiple Models Approach in Automation: Takagi-Sugeno Fuzzy SystemsNoch keine Bewertungen
- Nonlinear Control Feedback Linearization Sliding Mode ControlVon EverandNonlinear Control Feedback Linearization Sliding Mode ControlNoch keine Bewertungen
- Jogl Ex 20305Dokument1 SeiteJogl Ex 20305Mohit1234zxtNoch keine Bewertungen
- Calculo de Un Credito para HipotecaDokument26 SeitenCalculo de Un Credito para HipotecaREINALDO VELASQUEZNoch keine Bewertungen
- Git Cheat Sheet Education PDFDokument2 SeitenGit Cheat Sheet Education PDFnhungdieubatchotNoch keine Bewertungen
- Dzone RC Getting Started With Git PDFDokument6 SeitenDzone RC Getting Started With Git PDFess_kayNoch keine Bewertungen
- 19 BeamElementsDokument16 Seiten19 BeamElementsMichael CifuentesNoch keine Bewertungen
- Jogl Ex 20305Dokument1 SeiteJogl Ex 20305Mohit1234zxtNoch keine Bewertungen
- 14 Examples of Evolutionary AlgorithmsDokument23 Seiten14 Examples of Evolutionary AlgorithmsA. S.Noch keine Bewertungen
- 10 Chapter4Dokument28 Seiten10 Chapter4Mohit1234zxtNoch keine Bewertungen
- H04-Intro To CDokument14 SeitenH04-Intro To CksardereNoch keine Bewertungen
- Eiben Smith Intro2EC Ch2Dokument21 SeitenEiben Smith Intro2EC Ch2Ravindra MuleNoch keine Bewertungen
- Ae4131 Abaqus Lecture 1Dokument28 SeitenAe4131 Abaqus Lecture 1seangpkNoch keine Bewertungen
- Adobe Acrobat PDF FilesDokument1 SeiteAdobe Acrobat PDF FilesMohit1234zxtNoch keine Bewertungen
- Eiben Smith Intro2EC Ch2Dokument21 SeitenEiben Smith Intro2EC Ch2Ravindra MuleNoch keine Bewertungen
- TestDokument1 SeiteTestjkwascomNoch keine Bewertungen
- MarathiDokument16 SeitenMarathiMohit1234zxtNoch keine Bewertungen
- 2 ElementsDokument8 Seiten2 Elementsوليد الجاسمNoch keine Bewertungen
- Warning: This Feature Is Intended For Advanced Users Only. Its Use in All But The Simplest TestDokument16 SeitenWarning: This Feature Is Intended For Advanced Users Only. Its Use in All But The Simplest TestMohit1234zxtNoch keine Bewertungen
- Optimization White Paper PDFDokument12 SeitenOptimization White Paper PDFMohit1234zxtNoch keine Bewertungen
- Convergence and Errors PDFDokument13 SeitenConvergence and Errors PDFMohit1234zxtNoch keine Bewertungen
- 2 ElementsDokument8 Seiten2 Elementsوليد الجاسمNoch keine Bewertungen
- (Flip-Side) 7. IC Engine Exhaust EmissionsDokument35 Seiten(Flip-Side) 7. IC Engine Exhaust EmissionsMohit1234zxtNoch keine Bewertungen
- (Flip-Side) 6. Combustion in IC EnginesDokument40 Seiten(Flip-Side) 6. Combustion in IC EnginesMohit1234zxtNoch keine Bewertungen
- (Flip-Side) 4. Intake, Exhaust, Cylinder FlowDokument62 Seiten(Flip-Side) 4. Intake, Exhaust, Cylinder FlowMohit1234zxtNoch keine Bewertungen
- (Flip-Side) 2. Engine PerformanceDokument33 Seiten(Flip-Side) 2. Engine PerformanceMohit1234zxtNoch keine Bewertungen
- (Flip-Side) 3. Thermodynamic CyclesDokument32 Seiten(Flip-Side) 3. Thermodynamic CyclesMohit1234zxtNoch keine Bewertungen
- Week 3 Lab Arado, Patrick James M.Dokument2 SeitenWeek 3 Lab Arado, Patrick James M.Jeffry AradoNoch keine Bewertungen
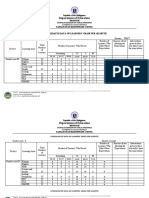
- Department of Education: Consolidated Data On Learners' Grade Per QuarterDokument4 SeitenDepartment of Education: Consolidated Data On Learners' Grade Per QuarterUsagi HamadaNoch keine Bewertungen
- solidworks ขั้นพื้นฐานDokument74 Seitensolidworks ขั้นพื้นฐานChonTicha'Noch keine Bewertungen
- (Gray Meyer) Analysis and Design of Analog Integrated Circuits 5th CroppedDokument60 Seiten(Gray Meyer) Analysis and Design of Analog Integrated Circuits 5th CroppedvishalwinsNoch keine Bewertungen
- Unit 2: Air Intake and Exhaust SystemsDokument10 SeitenUnit 2: Air Intake and Exhaust SystemsMahmmod Al-QawasmehNoch keine Bewertungen
- CM2192 - High Performance Liquid Chromatography For Rapid Separation and Analysis of A Vitamin C TabletDokument2 SeitenCM2192 - High Performance Liquid Chromatography For Rapid Separation and Analysis of A Vitamin C TabletJames HookNoch keine Bewertungen
- Importance of Porosity - Permeability Relationship in Sandstone Petrophysical PropertiesDokument61 SeitenImportance of Porosity - Permeability Relationship in Sandstone Petrophysical PropertiesjrtnNoch keine Bewertungen
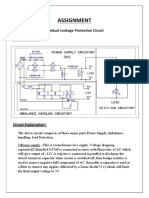
- Assignment: Residual Leakage Protection Circuit Circuit DiagramDokument2 SeitenAssignment: Residual Leakage Protection Circuit Circuit DiagramShivam ShrivastavaNoch keine Bewertungen
- Aristotle - OCR - AS Revision NotesDokument3 SeitenAristotle - OCR - AS Revision NotesAmelia Dovelle0% (1)
- Mahindra&mahindraDokument95 SeitenMahindra&mahindraAshik R GowdaNoch keine Bewertungen
- Names of Planner(s) : Style of Experience: (Whole Class, Small Group, Etc.) Lab: KindergartenDokument4 SeitenNames of Planner(s) : Style of Experience: (Whole Class, Small Group, Etc.) Lab: Kindergartenapi-428128701Noch keine Bewertungen
- The Bio-Based Economy in The NetherlandsDokument12 SeitenThe Bio-Based Economy in The NetherlandsIrving Toloache FloresNoch keine Bewertungen
- Intelligent Status Monitoring System For Port Machinery: RMGC/RTGCDokument2 SeitenIntelligent Status Monitoring System For Port Machinery: RMGC/RTGCfatsahNoch keine Bewertungen
- Sensitivity of Rapid Diagnostic Test and Microscopy in Malaria Diagnosis in Iva-Valley Suburb, EnuguDokument4 SeitenSensitivity of Rapid Diagnostic Test and Microscopy in Malaria Diagnosis in Iva-Valley Suburb, EnuguSMA N 1 TOROHNoch keine Bewertungen
- Calculating Free Energies Using Adaptive Biasing Force MethodDokument14 SeitenCalculating Free Energies Using Adaptive Biasing Force MethodAmin SagarNoch keine Bewertungen
- RH-A Catalog PDFDokument1 SeiteRH-A Catalog PDFAchmad KNoch keine Bewertungen
- KRAS QC12K-4X2500 Hydraulic Shearing Machine With E21S ControllerDokument3 SeitenKRAS QC12K-4X2500 Hydraulic Shearing Machine With E21S ControllerJohan Sneider100% (1)
- Swelab Alfa Plus User Manual V12Dokument100 SeitenSwelab Alfa Plus User Manual V12ERICKNoch keine Bewertungen
- Engineering Management: Class RequirementsDokument30 SeitenEngineering Management: Class RequirementsMigaeaNoch keine Bewertungen
- Poster-Shading PaperDokument1 SeitePoster-Shading PaperOsama AljenabiNoch keine Bewertungen
- Categorical SyllogismDokument3 SeitenCategorical SyllogismYan Lean DollisonNoch keine Bewertungen
- Test On Real NumberaDokument1 SeiteTest On Real Numberaer.manalirathiNoch keine Bewertungen
- Data SheetDokument56 SeitenData SheetfaycelNoch keine Bewertungen
- FINAL SMAC Compressor Control Philosophy Rev4Dokument6 SeitenFINAL SMAC Compressor Control Philosophy Rev4AhmedNoch keine Bewertungen