Das könnte Ihnen auch gefallen
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- Lakehurst Middle School Summer Math Packet: End-of-Course TestDokument4 SeitenLakehurst Middle School Summer Math Packet: End-of-Course TestTony LeeNoch keine Bewertungen
- Peter Attia Measuring Cardiovascular Disease Risk and The Importance of ApoBDokument14 SeitenPeter Attia Measuring Cardiovascular Disease Risk and The Importance of ApoBabhimanyu50% (2)
- Sal de CrosetatDokument3 SeitenSal de CrosetatMădălina Pisău100% (1)
- Applied Combinatorics, Second Edition by Fred S Roberts, Barry TesmanDokument889 SeitenApplied Combinatorics, Second Edition by Fred S Roberts, Barry TesmanAnil kumarNoch keine Bewertungen
- Reso Course PlannerDokument2 SeitenReso Course PlannerSnehasishGhosh100% (1)
- Seguridad Electrica 4Dokument28 SeitenSeguridad Electrica 4salo081018Noch keine Bewertungen
- MPLS QAsDokument6 SeitenMPLS QAsLaxman Shrestha100% (1)
- SOP's For All Digital Marketing ActivitesDokument3 SeitenSOP's For All Digital Marketing ActivitesSavijeet Singh50% (2)
- FPGA Guide: Everything You Need to Know About Field Programmable Gate ArraysDokument14 SeitenFPGA Guide: Everything You Need to Know About Field Programmable Gate ArraysSheikh Noor MohammadNoch keine Bewertungen
- 4 Ece R13 Iv-IDokument25 Seiten4 Ece R13 Iv-ISheikh Noor MohammadNoch keine Bewertungen
- EEE R13 IV-I - Revised As On 09-08-16Dokument25 SeitenEEE R13 IV-I - Revised As On 09-08-16Sheikh Noor MohammadNoch keine Bewertungen
- 1 Darlington Pair AmplifierDokument2 Seiten1 Darlington Pair AmplifierSheikh Noor MohammadNoch keine Bewertungen
- 8086 Processor InterruptsDokument5 Seiten8086 Processor InterruptsSheikh Noor MohammadNoch keine Bewertungen
- Vlsi Design (Eee) .TextmarkDokument8 SeitenVlsi Design (Eee) .TextmarkSheikh Noor MohammadNoch keine Bewertungen
- Shadow Detection and Removal in Single-Image Using Paired RegionsDokument8 SeitenShadow Detection and Removal in Single-Image Using Paired RegionsEditor IJRITCCNoch keine Bewertungen
- GSM-based train fire accidents detection and prevention systemDokument27 SeitenGSM-based train fire accidents detection and prevention systemSheikh Noor MohammadNoch keine Bewertungen
- 9a04306-Digital Logic DesignDokument1 Seite9a04306-Digital Logic DesignSheikh Noor MohammadNoch keine Bewertungen
- Vector Calculus - Corral PDFDokument222 SeitenVector Calculus - Corral PDFMartin Martin MartinNoch keine Bewertungen
- Vector Calculus - Corral PDFDokument222 SeitenVector Calculus - Corral PDFMartin Martin MartinNoch keine Bewertungen
- Obul Reddy - EditDokument25 SeitenObul Reddy - EditSheikh Noor MohammadNoch keine Bewertungen
- 9A04306 Digital Logic DesignDokument1 Seite9A04306 Digital Logic DesignsivabharathamurthyNoch keine Bewertungen
- ObulDokument118 SeitenObulSheikh Noor MohammadNoch keine Bewertungen
- Jntua CSE R13 SyllabusDokument132 SeitenJntua CSE R13 SyllabusSheikh Noor MohammadNoch keine Bewertungen
- JNTUA ECE Course StructureDokument16 SeitenJNTUA ECE Course StructureNaveen YallapuNoch keine Bewertungen
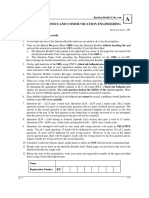
- Ec: Electronics and Communication Engineering: Duration: Three HoursDokument24 SeitenEc: Electronics and Communication Engineering: Duration: Three HoursSheikh Noor MohammadNoch keine Bewertungen
- Content Addressable MemoryDokument2 SeitenContent Addressable MemorySheikh Noor MohammadNoch keine Bewertungen
- Microprocessors Unit IIDokument47 SeitenMicroprocessors Unit IISheikh Noor MohammadNoch keine Bewertungen
- Content Addressable MemoryDokument2 SeitenContent Addressable MemorySheikh Noor MohammadNoch keine Bewertungen
- Diodes Thyristors TransistorsDokument19 SeitenDiodes Thyristors TransistorsJayloyd LaraNoch keine Bewertungen
- Hitachi ZW550Dokument12 SeitenHitachi ZW550ForomaquinasNoch keine Bewertungen
- 60 4690e PDFDokument3 Seiten60 4690e PDFMarudhasalamMarudhaNoch keine Bewertungen
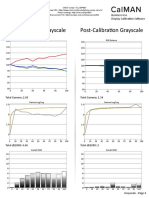
- TCL 55P607 CNET Review Calibration ResultsDokument3 SeitenTCL 55P607 CNET Review Calibration ResultsDavid KatzmaierNoch keine Bewertungen
- Yr 6 Maths G-6 E P-I PDFDokument168 SeitenYr 6 Maths G-6 E P-I PDFdina171279Noch keine Bewertungen
- CS610 Final Term Past Papers Mega FileDokument35 SeitenCS610 Final Term Past Papers Mega Filehowtoplaygames38Noch keine Bewertungen
- Materi Welding Defect IIDokument64 SeitenMateri Welding Defect IIsmartz inspectionNoch keine Bewertungen
- Synchronised Ujt Triggering CircuitDokument2 SeitenSynchronised Ujt Triggering Circuitsvinod s67% (3)
- Unit 2 MineralogyDokument53 SeitenUnit 2 MineralogyEashan Adil100% (1)
- A Greener, Biocatalytic Benzoin Synthesis: Kenyon College - CHEM 234 - Organic Chemistry Lab IIDokument2 SeitenA Greener, Biocatalytic Benzoin Synthesis: Kenyon College - CHEM 234 - Organic Chemistry Lab IINicalyn BolanteNoch keine Bewertungen
- Mos PDFDokument194 SeitenMos PDFChoon Ewe LimNoch keine Bewertungen
- The Road Beyond 5G: A Vision and Insight of The Key TechnologiesDokument7 SeitenThe Road Beyond 5G: A Vision and Insight of The Key TechnologiesSaurav SarkarNoch keine Bewertungen
- Steel Castings, Welding, Qualifications of Procedures and PersonnelDokument15 SeitenSteel Castings, Welding, Qualifications of Procedures and PersonnelRafael CossolinoNoch keine Bewertungen
- Statistical Properties of Population Stability IndexDokument60 SeitenStatistical Properties of Population Stability IndexВячеславNoch keine Bewertungen
- Refining of MaterialsDokument38 SeitenRefining of MaterialsJAWAD AHMAD BURTNoch keine Bewertungen
- Mac MKD StyleguideDokument47 SeitenMac MKD Styleguidetaurus_europeNoch keine Bewertungen
- Appendix B DAX ReferenceDokument174 SeitenAppendix B DAX ReferenceTomislav Mališ100% (1)
- ZF AVS Automatic Gearbox Manual PDFDokument67 SeitenZF AVS Automatic Gearbox Manual PDFDardan HusiNoch keine Bewertungen
- Manual Fx2n 485 BDDokument8 SeitenManual Fx2n 485 BDaxo_vfrNoch keine Bewertungen
- Prescurtari PDFDokument67 SeitenPrescurtari PDFהוד אנדרוNoch keine Bewertungen
- Preparation Exam API 510:N°01 QuestionsDokument3 SeitenPreparation Exam API 510:N°01 QuestionskorichiNoch keine Bewertungen
- AP+Bio 013+Photosynthesis++Respiration+Worksheet WLDokument2 SeitenAP+Bio 013+Photosynthesis++Respiration+Worksheet WLVincent SuarezNoch keine Bewertungen