Das könnte Ihnen auch gefallen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (894)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (587)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (119)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2219)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Sharp Lc-C3242u Supp PDFDokument6 SeitenSharp Lc-C3242u Supp PDFHugo Cortés0% (1)
- SDX 5000 - Operational ManuelDokument73 SeitenSDX 5000 - Operational Manuelmelihayanoglu34Noch keine Bewertungen
- John Deere Diesel GensetDokument2 SeitenJohn Deere Diesel Gensetnanocycle0% (1)
- Standards classification guideDokument5 SeitenStandards classification guidedishore312Noch keine Bewertungen
- Power System Stability Course Notes PART-1: Dr. A.Professor Mohammed Tawfeeq Al-ZuhairiDokument8 SeitenPower System Stability Course Notes PART-1: Dr. A.Professor Mohammed Tawfeeq Al-Zuhairidishore312100% (1)
- Measuring Physical QuantitiesDokument4 SeitenMeasuring Physical Quantitiesdishore312Noch keine Bewertungen
- Chapter-7 Power System Stability: Prepared by Balaram Das, EE Dept., GIET, GunupurDokument22 SeitenChapter-7 Power System Stability: Prepared by Balaram Das, EE Dept., GIET, Gunupurdishore312Noch keine Bewertungen
- EMMI - CH 5 - 11102018 - 063106AM PDFDokument13 SeitenEMMI - CH 5 - 11102018 - 063106AM PDFTadele YohannesNoch keine Bewertungen
- 1.3 - Units and Standards - Physics LibreTexts PDFDokument5 Seiten1.3 - Units and Standards - Physics LibreTexts PDFdishore312Noch keine Bewertungen
- System of Units - MKS, CGS and SI - Karnataka PCS Free Notes PDFDokument11 SeitenSystem of Units - MKS, CGS and SI - Karnataka PCS Free Notes PDFdishore312Noch keine Bewertungen
- Measurement Error Precision Physics ClassDokument11 SeitenMeasurement Error Precision Physics Classdishore312Noch keine Bewertungen
- System of Units - MKS, CGS and SI - Karnataka PCS Free Notesyhty PDFDokument11 SeitenSystem of Units - MKS, CGS and SI - Karnataka PCS Free Notesyhty PDFdishore312Noch keine Bewertungen
- Year2018 2019Dokument3 SeitenYear2018 2019dishore312Noch keine Bewertungen
- Measurement Error Precision Physics ClassDokument11 SeitenMeasurement Error Precision Physics Classdishore312Noch keine Bewertungen
- Measuring Physical QuantitiesDokument4 SeitenMeasuring Physical Quantitiesdishore312Noch keine Bewertungen
- Practice Exercises INF 397CDokument29 SeitenPractice Exercises INF 397Cdishore312Noch keine Bewertungen
- SdfrjwseoDokument1 SeiteSdfrjwseodishore312Noch keine Bewertungen
- PRGC1920Dokument9 SeitenPRGC1920dishore312Noch keine Bewertungen
- S5over AllDokument14 SeitenS5over Alldishore312Noch keine Bewertungen
- EEGUC2Dokument3 SeitenEEGUC2dishore312Noch keine Bewertungen
- V SaravananDokument7 SeitenV Saravanandishore312Noch keine Bewertungen
- Jabas Edwin Raj Resume - ME Engineer with 13 Years ExperienceDokument4 SeitenJabas Edwin Raj Resume - ME Engineer with 13 Years Experiencedishore312Noch keine Bewertungen
- CNCLDokument4 SeitenCNCLdishore312Noch keine Bewertungen
- Hindu SocioDokument5 SeitenHindu Sociodishore312Noch keine Bewertungen
- Book 1Dokument2 SeitenBook 1dishore312Noch keine Bewertungen
- BGN GGGDokument1 SeiteBGN GGGdishore312Noch keine Bewertungen
- H y KijuyDokument2 SeitenH y Kijuydishore312Noch keine Bewertungen
- The RIPPLE FACTOR Is A Measure of The Departure From Ideal and Is Defined RF Rms Value of All Alternating Components Mean Value of WaveDokument1 SeiteThe RIPPLE FACTOR Is A Measure of The Departure From Ideal and Is Defined RF Rms Value of All Alternating Components Mean Value of Wavedishore312Noch keine Bewertungen
- V SaravananDokument1 SeiteV Saravanandishore312Noch keine Bewertungen
- A Review On Voltage Balancing Solutions in Multilevel InvertersDokument7 SeitenA Review On Voltage Balancing Solutions in Multilevel Invertersdishore312Noch keine Bewertungen
- V SaravananDokument1 SeiteV Saravanandishore312Noch keine Bewertungen
- Ee6503 - Power Electronics: 2 Marks and 16 Marks-Question Bank Unit 1 - Introduction Two MarksDokument30 SeitenEe6503 - Power Electronics: 2 Marks and 16 Marks-Question Bank Unit 1 - Introduction Two Marksdishore312Noch keine Bewertungen
- SwitchingDokument1 SeiteSwitchingdishore312Noch keine Bewertungen
- An 931 Appnote Ad7689Dokument4 SeitenAn 931 Appnote Ad7689Gunta AkhiriNoch keine Bewertungen
- PARTS CATALOGDokument238 SeitenPARTS CATALOGmichael ourdanNoch keine Bewertungen
- Jadual Wim - Penjajaran Coptpa Cu, Wa, PPMPP, PPMPB Dan JPWDokument10 SeitenJadual Wim - Penjajaran Coptpa Cu, Wa, PPMPP, PPMPB Dan JPWBakal JenazahNoch keine Bewertungen
- Conversor DualDokument22 SeitenConversor DualAndré CarlosNoch keine Bewertungen
- TB6500 ManualDokument11 SeitenTB6500 ManualEnrique BautistaNoch keine Bewertungen
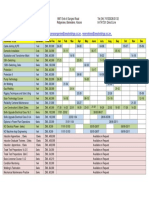
- Technical Training Calendar 20220122Dokument1 SeiteTechnical Training Calendar 20220122Lawson Shumirai Sango100% (1)
- iSTAR Ultra LT QSG 8200 1335 01 D0 enDokument27 SeiteniSTAR Ultra LT QSG 8200 1335 01 D0 enJan Andre RøeNoch keine Bewertungen
- Top224yn PDFDokument20 SeitenTop224yn PDFomarNoch keine Bewertungen
- Solar FenceDokument31 SeitenSolar FenceSARIKANoch keine Bewertungen
- Terrasat Communications IBUC 3 - IBUC3G Operations Manual - RevBDokument234 SeitenTerrasat Communications IBUC 3 - IBUC3G Operations Manual - RevBAyoola oNoch keine Bewertungen
- Tomacorriente 20amp Appleton CompletoDokument6 SeitenTomacorriente 20amp Appleton CompletoFex FexNoch keine Bewertungen
- Xgard Type 5 CH4 Detector ManualDokument17 SeitenXgard Type 5 CH4 Detector ManualwesleybaNoch keine Bewertungen
- Zurc-Cat Analogicos GBDokument20 SeitenZurc-Cat Analogicos GBAhmad DanishNoch keine Bewertungen
- LTC 4060Dokument20 SeitenLTC 4060Sherif EltoukhiNoch keine Bewertungen
- DataSheet MZT7-03VPS-KP0 1070814 enDokument6 SeitenDataSheet MZT7-03VPS-KP0 1070814 enJean ZacaríasNoch keine Bewertungen
- 220kV Da Bac - TEL, SER, FR, FL, TN48, INV Panel Drawing - R7Dokument200 Seiten220kV Da Bac - TEL, SER, FR, FL, TN48, INV Panel Drawing - R7Văn Ngọc NguyễnNoch keine Bewertungen
- HBS01 CJC hbs01 CJCDokument2 SeitenHBS01 CJC hbs01 CJCVishnu PatidarNoch keine Bewertungen
- Cba 2000 enDokument8 SeitenCba 2000 enRodrigoNoch keine Bewertungen
- Earth Rods PDFDokument5 SeitenEarth Rods PDFAmiableimpexNoch keine Bewertungen
- EasyRET 2L4H 12-Port Antenna SpecsDokument2 SeitenEasyRET 2L4H 12-Port Antenna SpecsIgor Aguirre89% (9)
- Sanyu SY2000 English ManualDokument37 SeitenSanyu SY2000 English Manualhv1793 VNoch keine Bewertungen
- Delivering Power to the Nation with Flame Retardant WiresDokument25 SeitenDelivering Power to the Nation with Flame Retardant WiresvijaysatawNoch keine Bewertungen
- America's PowerDokument1 SeiteAmerica's PoweralabamacoalNoch keine Bewertungen
- Inverter 1Dokument7 SeitenInverter 1Mahadev100% (1)
- Ag E4412A OperGuide enDokument47 SeitenAg E4412A OperGuide enPixel ShicNoch keine Bewertungen
- Engineering Electromagnetics Chapter 5Dokument30 SeitenEngineering Electromagnetics Chapter 5BharatNoch keine Bewertungen
- ProjectDokument31 SeitenProjectMR. CØØLNoch keine Bewertungen