Das könnte Ihnen auch gefallen
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- 2 Coagulation FlocculationDokument26 Seiten2 Coagulation FlocculationNurSyuhada ANoch keine Bewertungen
- Shell Hazardous Area Classification FundamentalsDokument30 SeitenShell Hazardous Area Classification Fundamentalsthekevindesai100% (17)
- A Sample of Wet Soil Has A Volume of 0Dokument8 SeitenA Sample of Wet Soil Has A Volume of 0eph0% (1)
- Engine Maintenance PartsDokument13 SeitenEngine Maintenance PartsSerkanAl100% (1)
- Advance Logic Activity On CountersDokument31 SeitenAdvance Logic Activity On CountersKrinx BuliganNoch keine Bewertungen
- Sec VlanaclsDokument10 SeitenSec VlanaclsTry FajarmanNoch keine Bewertungen
- Material Safety Data Sheet: Roduct Ompany DentificationDokument6 SeitenMaterial Safety Data Sheet: Roduct Ompany DentificationArgade GVNoch keine Bewertungen
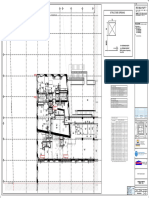
- 20105-AR-HOT-07-105-01 Rev 00Dokument1 Seite20105-AR-HOT-07-105-01 Rev 00Bahaa MohamedNoch keine Bewertungen
- 06-901 Keyed Input SwitchesDokument4 Seiten06-901 Keyed Input Switchesmajed al.madhajiNoch keine Bewertungen
- Quantity Surveying Division Assessment of Professional Competence Final Assessment 2014 Practice Problems / Part Ii Written TestDokument31 SeitenQuantity Surveying Division Assessment of Professional Competence Final Assessment 2014 Practice Problems / Part Ii Written TestjackyNoch keine Bewertungen
- Woson 23 Litre B Class Touch AutoclaveDokument2 SeitenWoson 23 Litre B Class Touch AutoclaveBashar MohammadNoch keine Bewertungen
- Ain Tsila Development Main EPC Contract A-CNT-CON-000-00282 Subcontract N°: JI-2045/07-002BDokument15 SeitenAin Tsila Development Main EPC Contract A-CNT-CON-000-00282 Subcontract N°: JI-2045/07-002BAslaouiNoch keine Bewertungen
- Tutorial - 05 - Excavation Settle 3DDokument13 SeitenTutorial - 05 - Excavation Settle 3DAlejandro Camargo SanabriaNoch keine Bewertungen
- Solar Pond - Awesome PDFDokument26 SeitenSolar Pond - Awesome PDFKartik MahajanNoch keine Bewertungen
- Report On HACCP ManualDokument72 SeitenReport On HACCP ManualRizwan KhanNoch keine Bewertungen
- ChemCAD and ConcepSys AIChE Spring 09Dokument28 SeitenChemCAD and ConcepSys AIChE Spring 09ConcepSys Solutions LLCNoch keine Bewertungen
- Session 5 PDFDokument26 SeitenSession 5 PDFToufic HageNoch keine Bewertungen
- HighpuritysealsDokument6 SeitenHighpuritysealstuannhocutNoch keine Bewertungen
- Lecture10 Combined FootingsDokument31 SeitenLecture10 Combined FootingsGopalram Sudhirkumar100% (3)
- VLE Lactic Acid Ethyl Lactate Esterification PDFDokument7 SeitenVLE Lactic Acid Ethyl Lactate Esterification PDFAseem Kashyap0% (1)
- Intermec CS40 SpecsDokument8 SeitenIntermec CS40 Specsss1222Noch keine Bewertungen
- Prospects For Alkaline Zero Gap Water Electrolysers For Hydrogen ProductionDokument16 SeitenProspects For Alkaline Zero Gap Water Electrolysers For Hydrogen Productionkhan47pkNoch keine Bewertungen
- Formulas To RememberDokument6 SeitenFormulas To Rememberuygurzeren100% (3)
- Introduction To Wireless Application Protocol (WAP) OGIDokument12 SeitenIntroduction To Wireless Application Protocol (WAP) OGIApram SinghNoch keine Bewertungen
- Le22a1321 AocDokument130 SeitenLe22a1321 AocEchefisEchefisNoch keine Bewertungen
- Steel Top Hats Battens Capacitytables Product Technical ManualDokument16 SeitenSteel Top Hats Battens Capacitytables Product Technical ManualbhukthaNoch keine Bewertungen
- 701.ssvseat 1.04Dokument2 Seiten701.ssvseat 1.04Cosmin MuscaluNoch keine Bewertungen
- 3310 ATF DEXRON III H PDS Vesion 3Dokument2 Seiten3310 ATF DEXRON III H PDS Vesion 3luayhabibbNoch keine Bewertungen
- PT14 Engine Monitor 1Dokument2 SeitenPT14 Engine Monitor 1BJ DixNoch keine Bewertungen
- PBLauncherDokument50 SeitenPBLauncherborreveroNoch keine Bewertungen