Das könnte Ihnen auch gefallen
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5795)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Error Rateio NorunDokument725 SeitenError Rateio Norunmatheus felipeNoch keine Bewertungen
- Assignment SurveyDokument4 SeitenAssignment Surveyfatin_fazlina_1Noch keine Bewertungen
- Tube Material SelectionDokument67 SeitenTube Material Selectionpatidar11100% (6)
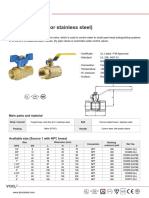
- VC02 Brass Ball Valve Full Port Full BoreDokument2 SeitenVC02 Brass Ball Valve Full Port Full Boremahadeva1Noch keine Bewertungen
- Datasheet 12NA60Dokument11 SeitenDatasheet 12NA60ed pwtNoch keine Bewertungen
- Pellets Burner 6 00 Manual EnglishDokument22 SeitenPellets Burner 6 00 Manual EnglishTasos KachpanisNoch keine Bewertungen
- How To Draw Circuit DiagramDokument1 SeiteHow To Draw Circuit DiagramSAMARJEETNoch keine Bewertungen
- CH 01Dokument28 SeitenCH 01Deepu MaroliNoch keine Bewertungen
- Mechanical Engineering Manufacturing.149Dokument1 SeiteMechanical Engineering Manufacturing.149Anonymous QvIxEazXGdNoch keine Bewertungen
- United Ground Express - OrD New Hire Orientation and Training Logistics - 6212021Dokument3 SeitenUnited Ground Express - OrD New Hire Orientation and Training Logistics - 6212021Anouar El mekaouiNoch keine Bewertungen
- Overheat Freeze Mechanisms of Solar CollectorsDokument5 SeitenOverheat Freeze Mechanisms of Solar CollectorsJuli HasanajNoch keine Bewertungen
- J Proc CTRL Vol 19 2009 Q Wang K Astrom - Guaranteed Dominant Pole PlacementDokument4 SeitenJ Proc CTRL Vol 19 2009 Q Wang K Astrom - Guaranteed Dominant Pole PlacementmtichyscribdNoch keine Bewertungen
- How Many Sensors Should I Use in A Temperature Mapping StudyDokument10 SeitenHow Many Sensors Should I Use in A Temperature Mapping StudyyogiyogaNoch keine Bewertungen
- Cop - CannyDokument3 SeitenCop - CannyAlaa Layas0% (1)
- DIN EN 179 I 1125 PDFDokument3 SeitenDIN EN 179 I 1125 PDFDushan RomicNoch keine Bewertungen
- Recorder Modifications - Alec Loretto 3Dokument4 SeitenRecorder Modifications - Alec Loretto 3Clown e GregorianoNoch keine Bewertungen
- ATB Riva Calzoni Gianluca RaseniDokument35 SeitenATB Riva Calzoni Gianluca RaseniDiana QuinteroNoch keine Bewertungen
- Aalco StocklistDokument36 SeitenAalco StocklistjsfscibdNoch keine Bewertungen
- Husic GuideDokument3 SeitenHusic Guideth1mkNoch keine Bewertungen
- Early Cinema ProjectDokument1 SeiteEarly Cinema Projectapi-240207139Noch keine Bewertungen
- Familiarization With Rational RoseDokument12 SeitenFamiliarization With Rational RoseKota Venkata Jagadeesh100% (1)
- 연대경제대학원 석사학위논문 학술정보원등록 최종본Dokument121 Seiten연대경제대학원 석사학위논문 학술정보원등록 최종본0514bachNoch keine Bewertungen
- ABB - PCS 6000 STATCOM - Reference ListDokument8 SeitenABB - PCS 6000 STATCOM - Reference ListProyectos IPC S.A.S - Manuel CadenaNoch keine Bewertungen
- Preventa Safety Detection XCSE5311Dokument2 SeitenPreventa Safety Detection XCSE5311Fernando MoreiraNoch keine Bewertungen
- Temperature Measuring Instrument (1-Channel) : Testo 925 - For Fast and Reliable Measurements in The HVAC FieldDokument8 SeitenTemperature Measuring Instrument (1-Channel) : Testo 925 - For Fast and Reliable Measurements in The HVAC FieldMirwansyah TanjungNoch keine Bewertungen
- M8JZ47Dokument5 SeitenM8JZ47Leo GuillermoNoch keine Bewertungen
- ANCAP Corporate Design GuidelinesDokument20 SeitenANCAP Corporate Design GuidelineshazopmanNoch keine Bewertungen
- Six Sigma Awareness New VersionDokument46 SeitenSix Sigma Awareness New VersionBESNoch keine Bewertungen
- Internet and Java ProgrammingDokument4 SeitenInternet and Java ProgrammingsharmaarakeyshNoch keine Bewertungen