Das könnte Ihnen auch gefallen
- A Brief Introduction to MATLAB: Taken From the Book "MATLAB for Beginners: A Gentle Approach"Von EverandA Brief Introduction to MATLAB: Taken From the Book "MATLAB for Beginners: A Gentle Approach"Bewertung: 2.5 von 5 Sternen2.5/5 (2)
- Graphs with MATLAB (Taken from "MATLAB for Beginners: A Gentle Approach")Von EverandGraphs with MATLAB (Taken from "MATLAB for Beginners: A Gentle Approach")Bewertung: 4 von 5 Sternen4/5 (2)
- Getting Help: Example: Look For A Function To Take The Inverse of A Matrix. Try Commands "HelpDokument24 SeitenGetting Help: Example: Look For A Function To Take The Inverse of A Matrix. Try Commands "Helpsherry mughalNoch keine Bewertungen
- Class 8Dokument14 SeitenClass 8lucyNoch keine Bewertungen
- Matlab Notes For Calculus 2: Lia VasDokument12 SeitenMatlab Notes For Calculus 2: Lia VasjojonNoch keine Bewertungen
- Introduction To MATLAB For Engineers, Third Edition: Numerical Methods For Calculus and Differential EquationsDokument47 SeitenIntroduction To MATLAB For Engineers, Third Edition: Numerical Methods For Calculus and Differential EquationsSeyed SadeghNoch keine Bewertungen
- Euler Method PDFDokument20 SeitenEuler Method PDFFauzi AbasNoch keine Bewertungen
- Matlab Notes For Calculus 3: Lia VasDokument14 SeitenMatlab Notes For Calculus 3: Lia VasTaha Alhatmi100% (1)
- Ode 45 ExampleDokument4 SeitenOde 45 ExampleShanmukha SundaramNoch keine Bewertungen
- Matlab Activity 5.1Dokument11 SeitenMatlab Activity 5.1roseleenNoch keine Bewertungen
- Plotting Graphs, Surfaces and Curves in Matlab: Plotting A Graph Z F (X, Y) or Level Curves F (X, Y) CDokument3 SeitenPlotting Graphs, Surfaces and Curves in Matlab: Plotting A Graph Z F (X, Y) or Level Curves F (X, Y) CShweta SridharNoch keine Bewertungen
- Math Signature Assignment 2Dokument6 SeitenMath Signature Assignment 2api-245099625Noch keine Bewertungen
- Assignment 1 Answers PDFDokument16 SeitenAssignment 1 Answers PDFtilamisuNoch keine Bewertungen
- Lab 00 IntroMATLAB2 PDFDokument11 SeitenLab 00 IntroMATLAB2 PDF'Jph Flores BmxNoch keine Bewertungen
- Matlab Intro11.12.08 SinaDokument26 SeitenMatlab Intro11.12.08 SinaBernard KendaNoch keine Bewertungen
- Solutions Practice Set DP GreedyDokument6 SeitenSolutions Practice Set DP GreedyNancy QNoch keine Bewertungen
- Sturm-Liouville Eigenvalue ProblemsDokument7 SeitenSturm-Liouville Eigenvalue Problemshammoudeh13Noch keine Bewertungen
- Math BookDokument160 SeitenMath BookDonovan WrightNoch keine Bewertungen
- Lecture 4Dokument12 SeitenLecture 4elneelNoch keine Bewertungen
- Multidimensional Arrays:: 1. Explain About Multidimensional Array? (Model Question)Dokument12 SeitenMultidimensional Arrays:: 1. Explain About Multidimensional Array? (Model Question)vinod3457Noch keine Bewertungen
- 5 Amt 2 Rev SolDokument7 Seiten5 Amt 2 Rev SolZakria ToorNoch keine Bewertungen
- César Pérez López Auth. MATLAB Differential and Integral Calculus Apress 2014 PDFDokument220 SeitenCésar Pérez López Auth. MATLAB Differential and Integral Calculus Apress 2014 PDFvictor farez100% (1)
- Calculus & DiffrentialDokument14 SeitenCalculus & DiffrentialAsim HussainNoch keine Bewertungen
- Mathematics 4330/5344 - # 3 Loops, Conditionals, Examples and ProgrammingDokument11 SeitenMathematics 4330/5344 - # 3 Loops, Conditionals, Examples and ProgrammingAlthara BaldagoNoch keine Bewertungen
- Introduction To MATLAB For Engineers, Third Edition: Numerical Methods For Calculus and Differential EquationsDokument47 SeitenIntroduction To MATLAB For Engineers, Third Edition: Numerical Methods For Calculus and Differential EquationsVinit SutarNoch keine Bewertungen
- Matlab Notes For Calculus 1: Lia VasDokument9 SeitenMatlab Notes For Calculus 1: Lia VasArdalan SaNoch keine Bewertungen
- Hair Settings PDFDokument20 SeitenHair Settings PDFkhayatNoch keine Bewertungen
- 5116 NotesDokument7 Seiten5116 NotesKoh JZNoch keine Bewertungen
- Numerical Linear Algebra With MatlabDokument16 SeitenNumerical Linear Algebra With MatlabOSBALDO1205Noch keine Bewertungen
- Potential Assignment MCEN90008 2016Dokument9 SeitenPotential Assignment MCEN90008 2016Umar AshrafNoch keine Bewertungen
- LAB 1: Intro To Matlab: 1.1. Work Space ManagementDokument4 SeitenLAB 1: Intro To Matlab: 1.1. Work Space ManagementChampion LodhiNoch keine Bewertungen
- Lab 8Dokument13 SeitenLab 8naimoonNoch keine Bewertungen
- HW 4Dokument4 SeitenHW 4Muhammad Uzair RasheedNoch keine Bewertungen
- Lab Maple8 TutorialDokument10 SeitenLab Maple8 TutorialPop RobertNoch keine Bewertungen
- Solving Problems in Dynamics and Vibrations Using MATLABDokument104 SeitenSolving Problems in Dynamics and Vibrations Using MATLABVivek ChauhanNoch keine Bewertungen
- Solving ODE Symbolically in MATLABDokument5 SeitenSolving ODE Symbolically in MATLABjojonNoch keine Bewertungen
- Lab 1-Introduction To MatlabDokument8 SeitenLab 1-Introduction To MatlabBatool HerzallahNoch keine Bewertungen
- Linear Control System LabDokument18 SeitenLinear Control System LabMuhammad Saad Abdullah100% (1)
- 3.1 Least-Squares ProblemsDokument28 Seiten3.1 Least-Squares ProblemsGabo GarcíaNoch keine Bewertungen
- MATLAB - AlgebraDokument4 SeitenMATLAB - AlgebraMourya ShashankNoch keine Bewertungen
- Online Maths Assignment HelpDokument19 SeitenOnline Maths Assignment HelpMath Homework SolverNoch keine Bewertungen
- MATLABDokument24 SeitenMATLABAudrey CruzNoch keine Bewertungen
- تطبيقات - الحاسوب - Computer application 8Dokument21 Seitenتطبيقات - الحاسوب - Computer application 8yousifNoch keine Bewertungen
- Functions in MATLAB: X 2.75 y X 2 + 5 X + 7 y 2.8313e+001Dokument21 SeitenFunctions in MATLAB: X 2.75 y X 2 + 5 X + 7 y 2.8313e+001Rafflesia KhanNoch keine Bewertungen
- JHU Department of Civil Engineering CE 560.445: Advanced Structural AnalysisDokument5 SeitenJHU Department of Civil Engineering CE 560.445: Advanced Structural Analysissakis1211Noch keine Bewertungen
- E7 Ordinary Differential Equation New - 0Dokument28 SeitenE7 Ordinary Differential Equation New - 0Mor DepRzNoch keine Bewertungen
- Intro M4 PDFDokument39 SeitenIntro M4 PDFchandralove100% (1)
- MATLAB MATLAB Lab Manual Numerical Methods and MatlabDokument14 SeitenMATLAB MATLAB Lab Manual Numerical Methods and MatlabJavaria Chiragh80% (5)
- Hour Exam 3 SolutionsDokument4 SeitenHour Exam 3 SolutionscekardNoch keine Bewertungen
- Matlab TutorialDokument18 SeitenMatlab TutorialUmair ShahidNoch keine Bewertungen
- LMS1 FunctionsDokument15 SeitenLMS1 FunctionsMay LelisNoch keine Bewertungen
- Solving Ordinary Differential Equations With MatlabDokument22 SeitenSolving Ordinary Differential Equations With MatlabMario ZamoraNoch keine Bewertungen
- Elementary Differential Equations with Linear AlgebraVon EverandElementary Differential Equations with Linear AlgebraNoch keine Bewertungen
- A-level Maths Revision: Cheeky Revision ShortcutsVon EverandA-level Maths Revision: Cheeky Revision ShortcutsBewertung: 3.5 von 5 Sternen3.5/5 (8)
- Mathematics 1St First Order Linear Differential Equations 2Nd Second Order Linear Differential Equations Laplace Fourier Bessel MathematicsVon EverandMathematics 1St First Order Linear Differential Equations 2Nd Second Order Linear Differential Equations Laplace Fourier Bessel MathematicsNoch keine Bewertungen
- Matrices with MATLAB (Taken from "MATLAB for Beginners: A Gentle Approach")Von EverandMatrices with MATLAB (Taken from "MATLAB for Beginners: A Gentle Approach")Bewertung: 3 von 5 Sternen3/5 (4)
- CJT CONN BroschureDokument756 SeitenCJT CONN BroschureOzanNoch keine Bewertungen
- PLDT Prolinkwifirepeater Quickstartguide PDFDokument2 SeitenPLDT Prolinkwifirepeater Quickstartguide PDFLenin KingNoch keine Bewertungen
- Analysis of Error Rate For NOMA System Over Different Fading ChannelDokument7 SeitenAnalysis of Error Rate For NOMA System Over Different Fading ChannelMinh Trương100% (1)
- Exam Syria ATA 34Dokument4 SeitenExam Syria ATA 34Mohamed AliNoch keine Bewertungen
- Windows 10 Guide PDFDokument10 SeitenWindows 10 Guide PDFAbeyMulugetaNoch keine Bewertungen
- CH-0037-19 - NOKIA Chile RevCDokument13 SeitenCH-0037-19 - NOKIA Chile RevCjmccardenasNoch keine Bewertungen
- What Is LUNDokument10 SeitenWhat Is LUNPhan AnNoch keine Bewertungen
- Dell 2135cn - ServiceMan (2009)Dokument898 SeitenDell 2135cn - ServiceMan (2009)Jonathan LongNoch keine Bewertungen
- Murata MA40 SERIESDokument2 SeitenMurata MA40 SERIESMiltonAlvaradoPonceNoch keine Bewertungen
- Guidelines:: September 1, 2006Dokument4 SeitenGuidelines:: September 1, 2006hpoerbayaNoch keine Bewertungen
- Motivate! 2 End-Of-Year Exam Basic: Units 1-9Dokument6 SeitenMotivate! 2 End-Of-Year Exam Basic: Units 1-9Oum Vibol SatyaNoch keine Bewertungen
- IAL Mathematics Sample Assessment MaterialDokument460 SeitenIAL Mathematics Sample Assessment MaterialMohamed Naaif100% (3)
- Myra User Manual Version 1.6.8-CompressedDokument88 SeitenMyra User Manual Version 1.6.8-CompressedmouhNoch keine Bewertungen
- Rup Vs ScrumDokument9 SeitenRup Vs ScrumMehdi AmiriNoch keine Bewertungen
- 1966 - An Analysis of Vendor Selection Systems and Decisions - Dickson PDFDokument13 Seiten1966 - An Analysis of Vendor Selection Systems and Decisions - Dickson PDFAaMir AdEeb100% (1)
- Iso 10083 2006 en FR PDFDokument11 SeitenIso 10083 2006 en FR PDFGiovanni BalderramaNoch keine Bewertungen
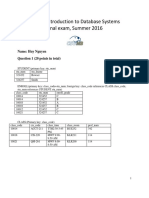
- CST363 Final Exam HuyNguyenDokument9 SeitenCST363 Final Exam HuyNguyenHuy NguyenNoch keine Bewertungen
- 20Dokument83 Seiten20altaminNoch keine Bewertungen
- Nera Telecommunications LTD Annual Report 2019 PDFDokument160 SeitenNera Telecommunications LTD Annual Report 2019 PDFNipun SahniNoch keine Bewertungen
- v1 Kode Script Hack FB HTML Inspect ElementDokument1 Seitev1 Kode Script Hack FB HTML Inspect ElementDian Ardiyanto100% (1)
- S23 Autosampler ConfiguratonDokument10 SeitenS23 Autosampler ConfiguratonUswatul HasanahNoch keine Bewertungen
- Blockbash 2023 DocumentDokument14 SeitenBlockbash 2023 DocumentNoch keine Bewertungen
- Service Manual Lex MX 310 410 510.PDF 2Dokument394 SeitenService Manual Lex MX 310 410 510.PDF 2Wellington SantosNoch keine Bewertungen
- Reimage FTDDokument46 SeitenReimage FTDgica hagiNoch keine Bewertungen
- CS111 Intro. To CS (Lecture 0 - Fall 2021)Dokument28 SeitenCS111 Intro. To CS (Lecture 0 - Fall 2021)Bas SimNoch keine Bewertungen
- BST106-M10 (FB) Weighing Controller: Operation Manual V5.0Dokument61 SeitenBST106-M10 (FB) Weighing Controller: Operation Manual V5.029374925morNoch keine Bewertungen
- Quad Loop Extender ModuleDokument4 SeitenQuad Loop Extender ModuleBeast NQNoch keine Bewertungen
- Intelligence Officer Weekly Test 01Dokument16 SeitenIntelligence Officer Weekly Test 01onlyforacademy13Noch keine Bewertungen
- SIP Signalling Router HandbookDokument28 SeitenSIP Signalling Router HandbookSandeep_Patil_305Noch keine Bewertungen